Навигация
Исследование установившегося режима САР
21461
знак
11
таблиц
19
изображений
1.7 Исследование установившегося режима САР
1.7.1 Выбор задающих воздействийВ следящей системе задающее воздействие заранее не известно—на то она и следящая система. Смотрите ниже по тексту в подразделе Моделирование рабочего режима САР в соответствии с индивидуальным заданием.
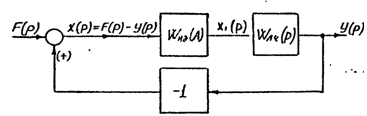
1.7.2 Расчет передаточных функций и статических ошибок САРСтруктурная схема имеет вид:
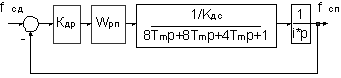
Рисунок 1.5—Структурная схема САР
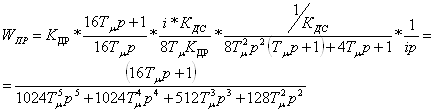
Найдем передаточную функцию прямой ветви:
Передаточная функция системы по задающему воздействию имеет вид:
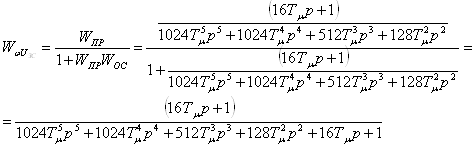
Коэффициент передачи по задающему воздействию: 1.
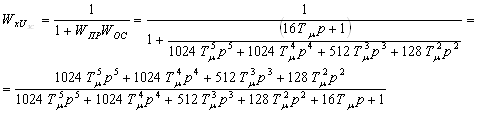
Передаточная функция ошибки от задающего воздействия:
Передаточная функция по возмущающему воздействию. Показывает как изменяется выходная величина системы при действии на систему возмущающего воздействия. Для того, чтобы доказать, что система является астатической (хотя это видно невооруженным взглядом—в прямой цепи регулятора есть интегратор), сначала рассмотрим действие возмущения на контур скорости: если выходная величина контура скорости не изменится при действии возмущения, тогда никакого влияния на контур положения это возмущения также не окажет.
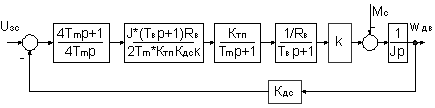
Рисунок 1.6—Структурная схема контура скорости
Итак, передаточная функция ошибки контура скорости от возмущающего воздействия имеет вид:

При «р=0» (статический режим) ошибка скорости равна нулю. Т.е. возмущающее воздействие не оказывает влияния на выходную величину контура скорости. Поэтому контур положения даже и не заметит присутствия возмущения. А значит коэффициент передачи контура положения от возмущения и ошибка контура положения от возмущения равны нулю.
1.7.3 Расчет статической механической характеристики замкнутой САРСтатическая механическая характеристика—это зависимость выходной координаты системы от возмущающего воздействия при заданном задающем воздействии. В общем виде данная характеристика представляется выражением:
![]() ,
,
гдеYВЫХ—выходная координата системы;
UЗ и f—задающее и возмущающее воздействия;
КYЗ и Кyf—коэффициенты передачи по задающему и возмущающему воздействию.
Коэффициент передачи по возмущающему воздействию равен нулю, тогда приведенное выше выражение преобразуется в следующее:
![]() ,
,
а это есть уравнение прямой линии, параллельной оси Х.
Таким образом, при любом возмущающем воздействии система будет поддерживать выходную координату на заданном уровне.
2. Исследование САР в переходных режимах
2.1 Составление структурно-алгоритмической модели без учета нелинейности характеристик элементовПри составлении структурно-алгоритмической модели в структурной схеме отдельно выделяются интегрирующие звенья. На входе интегратора будет производная переменной, а на выходе само значение.
Среди всех звеньев структурной схемы выделим типовые звенья: пропорциональное, интегральное, и апериодическое. Рассмотрим преобразование типового звена в структурно-алгоритмическую форму.
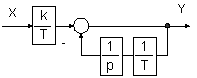
Апериодическое звено.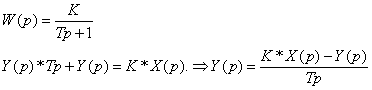
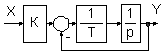
Таким образом, структурно-алгоритмическая форма апериодического звена имеет вид:
Дифференциальное звено.При составлении структурно-алгоритмической формы необходимо, чтобы числитель передаточной функции имел степень не больше знаменателя. Поэтому при моделировании дифференциального звена используют фильтр с малой постоянной времени, на порядок меньше, чем Тm.
![]()
Структурно-алгоритмическая форма имеет вид:
Структурно-алгоритмическая форма этих звенев не отличатся от обычной структурной формы. Пропорционально-интегральное звено является комбинацией пропорционального и интегрального звеньев.
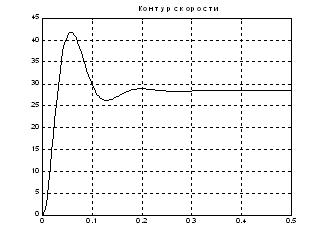
2.2 Расчет переходных характеристик по контурам Контур скорости.Схема модели представлена в приложении Б. По результатам моделирования, делаем вывод, что перерегулирование составляет 43%, время регулирования—16Тm.
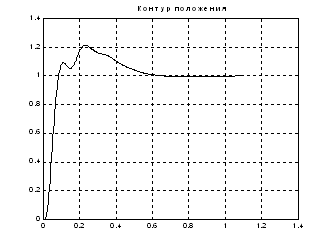
Контур положения.Схема модели представлена в приложении Б. По результатам моделирования делаем вывод, что перерегулирование составляет 21%, а время регулирования—40Тm.
2.3 Составление структурно-алоритмической модели с учетом нелинейностей характеристик элементовВ данном курсовом проекте согласно заданию задана нелинейность датчика тока типа «зона нечувствительности». Но в схеме нет датчика тока. Поэтому, посчитав это недочетом задания, взята нелинейность датчика скорости.
До некоторого значения входного сигнала, выходной сигнал датчика равен нулю, а далее изменяется линейно.
2.4 Расчет переходных характеристик, оценка показателей качестваИз-за того, что контур скорости имеет большое перерегулирование, то сигнал задания скорости нужно подавать через апериодическое звено. Если же этого не делать, то в переходном процессе контура положения видны колебания.
Из-за нелинейности датчика скорости в системе возникают незатухающие колебания, которые убрать невозможно, т.к. при выходе на номинальное положение скорость двигателя должна быть равна нулю, а контролировать это невозможно.
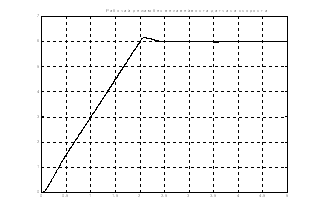
2.5 Моделирование режимов работы САР в соответствии с индивидуальным заданиемРежим работы САР следующий: через задатчик интенсивности задается угол поворота. Время выхода на номинальный режим—2 с. В момент времени 3,5 с. к системе прикладывается момент сопротивления равный номинальному моменту.
Полная модель САР и графики переходных процессов представлены в приложении Б. По результатам моделирования можно сделать выводы:
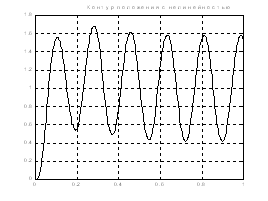
- В системе присутствуют незатухающие колебания. Уменьшить их амплитуду можно только уменьшением зоны нечувствительности датчика скорости.
- Момент сопротивления оказывает на систему незначительное влияние только при набросе, на статику он не влияет. Для того, чтобы это было лучше заметно приведен график без нелинейности датчика скорости. На графике с учетом нелинейности датчика на фоне автоколебаний наброс нагрузки вообще не просматривается.
2.6 Определение параметров автоколебанийДля определения параметров автоколебаний необходимо привести систему к виду:
Для нахождения параметров автоколебаний необходимо построить АФХ линейной и нелинейной части. Точка пересечения даст параметры автоколебаний.
АФХ нелинейной части.«Зона нечувствительности» датчика скорости представляет собой нелинейность, симметричную относительно начала координат. Поэтому комплексный коэффициент усиления не будет содержать мнимой части. АФХ будет проходить по действительной оси от минус бесконечности до минус единицы.
АФХ линейной части.Для нахождения передаточной функции преобразуем схему:
- Перенесем обратную связь по положению так, чтобы она стала параллельна обратной связи по скорости.
- Всё, что не охвачено этими связями—отбрасываем.
- Находим передаточную функцию линейной части.
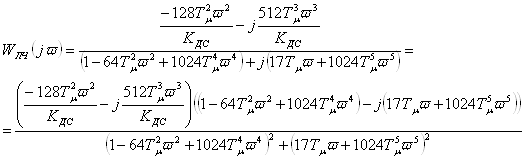
В итоге получим:
![]()


Для нахождения АФХ нужно «р» заменить на jw.
Выделим действительную и мнимую часть.
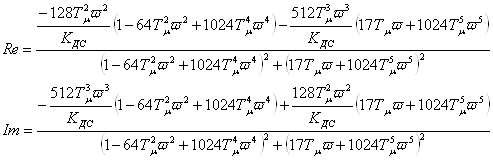
Для построения АФХ воспользуемся программой MathCAD:
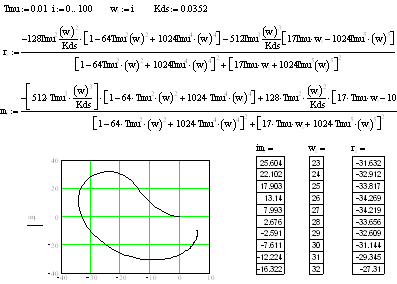
Видно, что АФХ линейной части пересекает ось Х на интервале [минус бесконечность; -1]. Значит в системе есть автоколебания. Приблизительная частота—28,5 рад/с. При этом вещественная часть по модулю равна «33». Такое же значение имеет вещественная часть АФХ нелинейного элемента (т.к. в точке пересечения они равны).
Комплексный коэффициент усиления нелинейного элемента не содержит мнимой части и имеет вид:
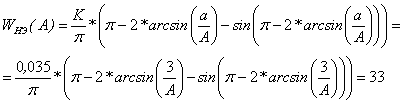
Из этого уравнения выражаем А=0,5.
Заключение
В результате проделанной работы была спроектирована двухконтурная система управления положением.
При моделировании рабочего режима были получены следующие результаты:
перерегулирование — 3% (без учета автоколебаний, амплитуда которых для данного режима — 8,3%);
время выхода на номинальный режим—1,95 секунды;
система работает с астатизмом первого порядка, т.е. при постоянного момента сопротивления положение рабочего органа равно заданному углу поворота.
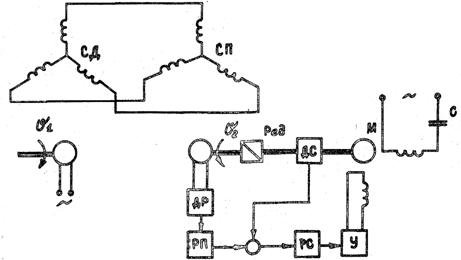
 Приложение А—Функциональная и структурная схемы электропривода
Приложение А—Функциональная и структурная схемы электропривода

Приложение Б — Листинги программ, таблицы результатов и графики
Модели Исходные данные для моделей:| Pnom=2200; Ianom=12.2; c=1.27; Rd=358; Ld=57.5; Jd=0.026; Ktp=24; m=2; Ttp=0.005+1/(2*50*m); Jm=0.025; ir=12; Mnom=Ianom*c; Idnom=10*Ktp/Rd; k=Mnom/Idnom; J=Jd+Jm; Uzp=3; Uzs=5; Td=Ld/Rd; Tmu=Ttp; wnom=Pnom/Mnom; Kds=Uzs/wnom; KdsN=wnom*Kds*0.2; Kdr=2.5; Trs=2*Tmu*Ktp*k*Kds/Rd; Krsd=Td*J/Trs; Krsp=J/Trs; Trsi=4*Tmu; Krp=ir*Kds/(8*Tmu*Kdr); Trpi=16*Tmu; | Номинальная мощность двигателя. Номинальный ток якоря. Конструктивный коэффициент «кФ». Сопротивление обмотки возбуждения. Индуктивность её же. Момент инерции двигателя. Коэффициент передачи тиристорного преобразователя. Число пульс выпрямителя. Постоянная времени выпрямителя. Приведенный момент инерции механизма. Передаточное число редуктора. Номинальный момент двигателя. Номинальный ток возбуждения Коэффициент пропорциональности между током возбуждения и моментом двигателя. Момент инерции привода. Напряжение задания положения. Напряжение задания скорости. Постоянная времени цепи возбуждения. (ТВ) Малая постоянная времени. (Тm) Номинальная скорость двигателей. Коэффициент передачи датчика скорости. Зона нечувствительности датчика скорости. Коэффициент передачи датчика рассогласования. Знаменатель регулятора скорости. Дифференциальная часть РС. Пропорциональная часть РС. Постоянная времени ПИ-части регулятора скорости Коэффициент передачи пропорциональной части РП. Постоянная времени ПИ-части регулятора положения. |




Похожие работы
... переходного процесса для системы с дискретным корректирующим звеном. 2.6.8. Определение рекуррентного уравнения дискретного корректирующего звена. 2.6.9. Разработка принципиальной схемы цифровой следящей системы. 2.7. Расчетно-пояснительная записка должна содержать следующие разделы. 2.7.1. Введение (цель выполнения работы, описание следящей системы, принцип ее ...


... управления и диагностики также произведен в данном дипломном проекте. ВЫВОДЫ И РЕКОМЕНДАЦИИ Результатом данного дипломного проекта является спроектированная система регулирования, контроля и регистрации потребления энергоносителей печью скоростного нагрева (ПСН) участка дифференцированной термической обработки прокатных валков, установленной в термическом цехе №2 ЗАО НКМЗ, ориентированная на ...
... соответствующие требованиям технической. 5 Энерго- и материалосбережение Для эффективного материалосбережения при разработке энергосберегающей системы освещения были применены следующие методы: 1. Уменьшение размеров печатной платы за счет увеличения плотности компоновки и рационального использование пространства платы, что экономит текстолит, затрачиваемый на изготовление платы. ...
... , с помощью которых можно создать как любое из перечисленных выше устройств, так и принципиально новое устройство. Цель курсовой работы - разработать микропроцессорную системы на базе микроконтроллера для спортивного велотренажера. 1. Описание объекта и функциональная спецификация Проблема ограничения времени, которое дети проводят за компьютером, многим родителям известна не понаслышке. О ...
0 комментариев