Навигация
2.2 Микросхема К1533АГ3
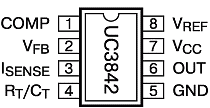
Микросхема К1533АГ3 представляет собой сдвоенный одновибратор с возможностью повторного запуска. Содержит 156 интегральных элементов. Внутренняя структура, условное обозначение приведены на рис. 7, а состояния работы К1533АГ3 даны в табл. 2. Каждый из мультивибраторов представляет собой триггер с двумя выходами ![]() и
и ![]() и дополнительной логикой на входе, имеющей три входа: вход сброса
и дополнительной логикой на входе, имеющей три входа: вход сброса ![]() (активный уровень - низкий) и два входа запуска
(активный уровень - низкий) и два входа запуска ![]() и
и ![]() . Вход
. Вход ![]() - инверсный с активным низким уровнем, а вход
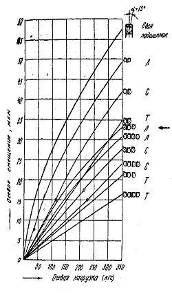
- инверсный с активным низким уровнем, а вход ![]() - прямой с активным высоким уровнем напряжения. На рис.9 показано подключение времязадающих элементов
- прямой с активным высоким уровнем напряжения. На рис.9 показано подключение времязадающих элементов ![]() и
и ![]() , а также график зависимостей
, а также график зависимостей ![]() от номиналов
от номиналов ![]() и
и ![]() . Для К1533АГ3 длительность выходного импульса
. Для К1533АГ3 длительность выходного импульса ![]() . В данной работе времязадающие элементы имеют номинал
. В данной работе времязадающие элементы имеют номинал ![]() и
и ![]() . Таким образом
. Таким образом ![]() .
.
Выходной импульс можно оборвать, подав на вход сброса ![]() напряжение низкого уровня.
напряжение низкого уровня.
Если мультивибратор К1533АГ3 запущен, то выходной импульс можно продолжить (перезапустить), подав на вход ![]() напряжение низкого уровня (или на вход
напряжение низкого уровня (или на вход ![]() - высокого). С момента перезапуска до окончания импульса пройдет время
- высокого). С момента перезапуска до окончания импульса пройдет время ![]() , определяемое времязадающими элементами
, определяемое времязадающими элементами ![]() и
и ![]() .
.
Если два ждущих мультивибратора микросхемы К1533АГ3 включить по кольцевой схеме, то получим автогенератор (автомультивибратор).
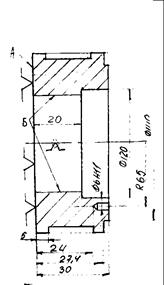
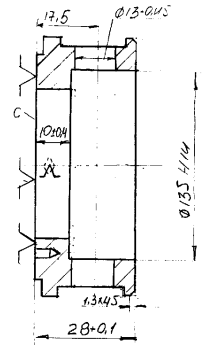
Корпус у К1533АГ3 типа 238.16-1 представлен на рис. 10, масса корпуса не более 2 г. Основные электрические параметры микросхемы приведены в табл. 3.
Таблица. 2. Состояния работы микросхемы К1533АГ3
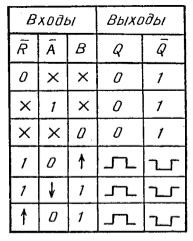

Рисунок. 7. Структура, условное графическое обозначение
и цоколевка микросхемы К1533АГ3
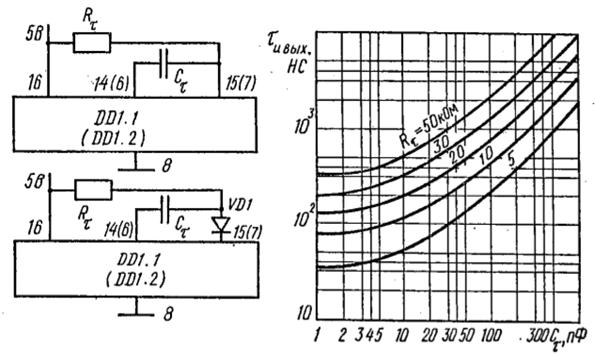
Рисунок. 8. Схемы подключения времязадающих элементов ![]() и
и ![]() ,
,
График зависимости ![]()
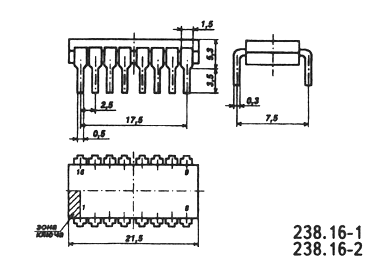
Рисунок. 9. Корпус микросхемы К1533АГ3
Основные электрические параметры микросхемы К1533АГ3 представлены далее в таблице 3.
Таблица. 3. Основные электрические параметры микросхемы К1533АГ3
| 1 | Номинальное напряжение питания | 5 В |
| 2 | Выходное напряжение низкого уровня |
|
| 3 | Выходное напряжение высокого уровня |
|
| 4 | Входной ток низкого уровня по информационным входам 1,2,9,10 по входам установки нуля 3,11 |
|
| 5 | Входной ток высокого уровня по информационным входам 1,2,9,10 по входам установки нуля 3,11 |
|
| 6 | Входной пробивной ток |
|
| 7 | Ток короткого замыкания | -10...-40 мА |
| 8 | Ток потребления |
|
| 9 | Потребляемая мощность |
|
| 10 | Время задержки распространения при включении по входам 1,9 по входам 2,10 по входам 3,11 |
|
| 11 | Время задержки распространения при выключении по входам 1,9 по входам 2,10 по входам 3,11 |
|
| 12 | Максимальная длительность импульса на выходе (Cвн)= 0 |
|
| 13 | Максимальная длительность импульса на выходе (Cвн)= 1000 пФ |
|
| 14 | Емкость нагрузки |
|
2.3 Микросхема K155АП5
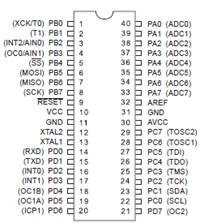
Микросхема представляет собой восьмиразрядный буфер . Используется в для разрешения/запрещения передачи данных с линий В на линии А. Логика работы микросхемы определяется поданными на контакты 1 и 19 сигналами. В процессе выполнения курсового проекта были задействованы контакты 1 и 19 следующим образом: на контакт 19 подавался нуль (контакт заземлялся), а на контакт 1 подавался либо нуль для запрещения передачи, либо единица для разрешения.
Вид микросхемы представлен на рисунке.10.
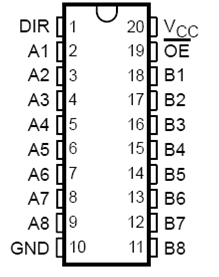
Рисунок 10
3 Схема макета
3.1 Схема принципиальная электрическая.
На рисунке 11 представлена разработанная принципиальная электрическая схема.
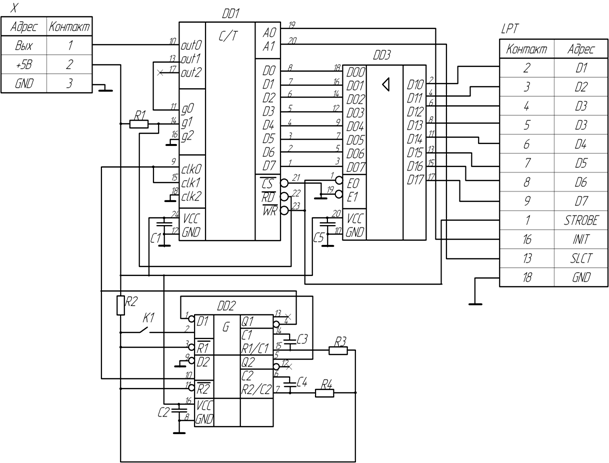
Рисунок 11. Принципиальная электрическая схема
Номиналы резисторов и конденсаторов:
R1, R2……….1Ком;
R3, R4……….6,8Ком;
C1, C2, C5…...0,15 пФ;
С3, С4………..220пФ.
3.2 Таблицы контактов
Далее в таблицах 4-8 представлены таблицы контактов.

Таблица 4 .Контакты DD1

Таблица 5.Контакты X
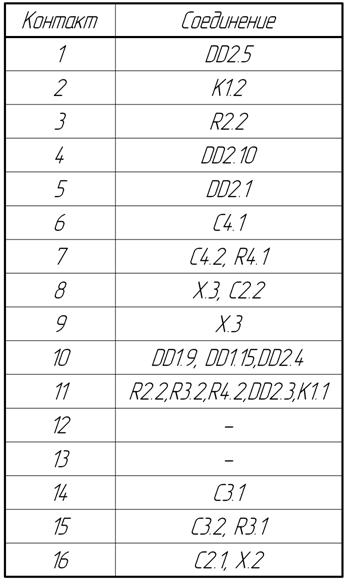
Таблица 6.Контакты DD2
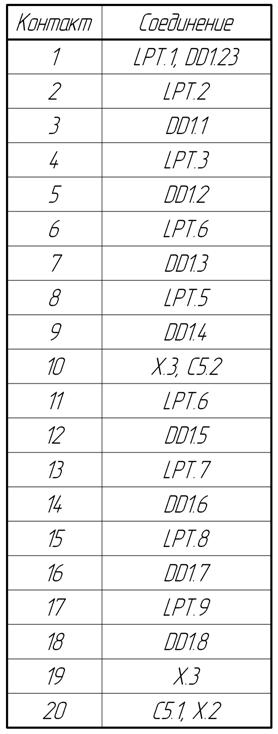
Таблица 7.Контакты DD3

Таблица 8.Контакты LPT
4 Программа управления
4.1 Логика работы
Программа осуществляет управление ШИМ-регулятором через LPT порт ЭВМ.
Для доступа к порту используются адреса 378H, 379H и 37AH. По адресу 378H осуществляется запись в регистр Data, по адресу 379H - в регистр Status и по адресу 37AH – в регистр Control.
В нашем случае, так как предполагается чтения из порта, а только запись в порт, то регистр Status не используется. Регистр Data используется для передачи байта в программируемый таймер-счётчик, а биты 0,1 и 2 регистра Control для выставления строба записи и выбора режима записи в таймер-счётчик.
На рисунке 12 изображены контакты LPT порта и их принадлежность тому или иному регистру.
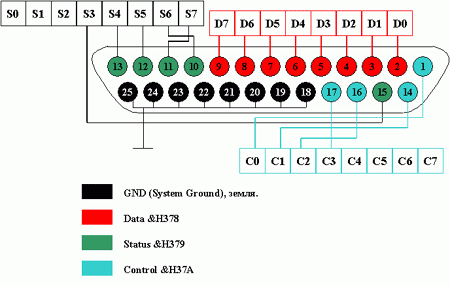
Рисунок 12
Для формирования на выходе ШИМ- регулятора импульсов с заданной скважностью и периодом, таймер-счётчик КР580ВИ53 был запрограммирован в режим работы 2 и 1 – соответственно таймер-счётчик 1 и 0 . Таймер-счётчик 2 не использовался.
В режиме 2 таймер выполняет функцию делителя входной частоты CLK на n. Таким образм мы получаем импульсы с определённым периодом и подаём их на вход таймера-счётчика 0, который работает в режиме 1, то есть в режиме программируемого мультивибратора. В результате на выходе таймера-счётчика 0 мы получаем импульсы с заданным периодом и скважностью. Для реализации данного алгоритма была написана программа. Теакт программы представлен в приложении А.
Заключение
В результате проделанной работы были получены знания в области макетирования и сборке платы ШИМ-регулятора, также были получены теоретические знания в области микропроцессорных средств. Была разработана электрическая схема ШИМ – регулятора и программа для управления через LPT порт ЭВМ. По результатам проделанной работы можно сделать вывод, что ШИМ – регулятор достаточно прост с точки зрения схемотехнического решения, а значит экономичен как с точки зрения элементной базы, так и с точки зрения денежных затрат. У него высокий коэффициент полезного действия и он упрощает работу транзистора, тем самым, обеспечивая его сохранность. Эти достоинства делают предпочтительным применение ШИМ – регулятора там, где необходима надёжность и простота реализации.
Приложение А
Текст программы
program lpt;
uses dos,crt;
var
addr_d,addr_c: word;
e:integer;
in_t,in_tau:byte;
input_t,input_tau: String;
procedure set_kanal_0(value: byte);{процедура установки режима работы счётчика-таймера 0}
var
PSW_strobe_0: byte;
PSW_strobe_1: byte;
N0_strobe_0: byte;
N0_strobe_1: byte;
psw_set: byte;
begin
PSW_strobe_1:=7;{00000111}
PSW_strobe_0:=6;{00000110}
N0_strobe_1:=1;{00000001}
N0_strobe_0:=0;{00000000}
psw_set:=50;{00110010}
{set mode}
Port[addr_c]:=PSW_strobe_1;
Port[addr_d]:=psw_set;
Port[addr_c]:=PSW_strobe_0;Port[addr_c]:=PSW_strobe_1;
{data => 8253}
Port[addr_d]:=value;
Port[addr_c]:=N0_strobe_0;Port[addr_c]:=N0_strobe_1;
end;
procedure set_kanal_1(value: byte); {процедура установки режима работы счётчика-таймера 1}
var
var
PSW_strobe_0: byte;
PSW_strobe_1: byte;
N1_strobe_0: byte;
N1_strobe_1: byte;
psw_set: byte;
begin
PSW_strobe_1:=7;{00000111}
PSW_strobe_0:=6;{00000110}
N1_strobe_1:=3;{00000011}
N1_strobe_0:=2;{00000010}
psw_set:=116;{01110100}
{set mode}
Port[addr_c]:=PSW_strobe_1;
Port[addr_d]:=psw_set;
Port[addr_c]:=PSW_strobe_0;Port[addr_c]:=PSW_strobe_1;
{data => 8253}
Port[addr_d]:=value;
Port[addr_c]:=N1_strobe_0;Port[addr_c]:=N1_strobe_1;
end;
begin
{считывание адреса LPT порта}
addr_d:=MemW[$0040:$0008];
{вычисление адреса регистра Control LPT порта}
addr_c:=addr_d+2;
while true do begin {считывание значений скважности и периода в цикле}
write('Период [q - для выхода]: ');
readln(input_t);
if input_t='q' then break;
val(input_t,in_t,e);
set_kanal_1(in_t);
write('Скважность [q - для выхода]: ');
readln(input_tau);
if input_tau='q' then break;
val(input_tau,in_tau,e);
set_kanal_0(in_tau);
writeln('==========================================');
end;{цикл выполняется до тех пор, пока не введена буква q}
end.
Похожие работы
... . Это позволяет: -снизить трудоемкость обработки -снизить себестоимость обработки -сократить время обработки и обслуживания. Ожидаемый частный годовой экономический эффект от автоматизации шлифовального процесса путем разработки автоматической системы управления параметров станка является снижение затрат на обработку детали типа кольцо ступенчатое при годовой программе выпуска 1000 ед. ...
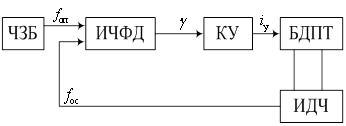
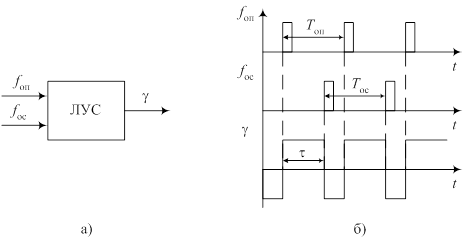
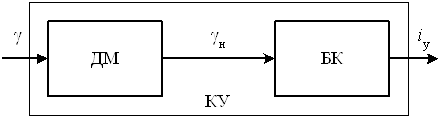
... принципиальной схемы приведена в Приложении Б Рисунок 3.7 - Принципиальная электрическая схема корректирующего устройства 4. Экономический расчет Затраты на проектирование цифрового регулятора для электропривода с фазовой синхронизацией определяются по формуле: , (1.1) где Сосн, зп - основная заработная плата персонала, руб.; Сдоп, зп - дополнительная заработная плата ...
... , КФ1158ЕНхх с малым падением напряжения вход - выход охватывает диапазон выходных напряжений от 3 до 15В. Все стабилизаторы предназначены для широкой области применения и идеально подходят для нужд автомобильной электроники, так как имеют встроенную защиту от выбросов входного напряжения при сбросе нагрузки генератора до 60 В, защиту при подключении входного напряжения в обратной полярности и от ...

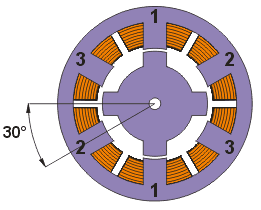
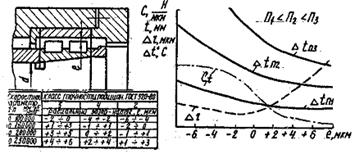
... при повышении частоты форма тока начинает отклоняться от синусоидальной и на очень больших частотах становится треугольной. Зависимость момента от скорости, влияние нагрузки Момент, создаваемый шаговым двигателем, зависит от нескольких факторов: · скорости · тока в обмотках · схемы драйвера На рис. 14а показана зависимость момента от угла поворота ротора. Рис. 14. Возникновение ...
0 комментариев