Навигация
Реализация цифрового фильтра нижних частот
25073
знака
5
таблиц
6
изображений
Министерство образования и науки РФ
РГРТУ
Пояснительная записка
к курсовому проекту по дисциплине:
"Цифровые устройства и микропроцессоры"
Студент Дмитриев А.Ю.
Группа 415 Специальность 2015
2007
Содержание
1. Постановка задачи (введение)
2. Формализация задачи
3. Разработка и описание общего алгоритма функционирования устройства
4. Обоснование построения аппаратной части устройства
5. Разработка и отладка программы на языке команд микропроцессора
6. Составление и описание электрической принципиальной схемы устройства
7. Расчёт быстродействия устройства
8. Расчёт АЧХ и ФЧХ устройства для заданных и реальных значений коэффициентов. Оценка устойчивости устройства
Заключение
Список использованных источников
1. Постановка задачи (введение)
Цифровая обработка сигналов , т.е. обработка сигналов с помощью средств электронной вычислительной техники ,стала известна около 35 лет назад. Электронные вычислительные машины тогда были дороги и несовершенны и поэтому их применяли лишь в сложных радиокомплексах , например, при расчете координат и траекторий объектов в радионавигационных системах слежения за космическими объектами , при расчете координат цели в радиолокационных станциях.
В последующие годы благодаря широкому применению транзисторов а затем и развитию микроэлектроники ЭВМ стали совершеннее, дешевле, а главное, компактнее. Появилась возможность использования вычислительной техники в сравнительно простой аппаратуре, например, в специальных радиоприемниках, системах фазовой подстройки частоты, системах телеметрии и т.д. С помощью цифровых устройств можно реализовать очень сложные алгоритмы обработки сигналов, которые трудно, а часто даже невозможно реализовать, используя обычную аналоговую технику. Алгоритм обработки сигналов можно изменять в зависимости от характера входного сигнала. Следовательно, легко построить самонастраивающуюся (адаптивную) систему. Цифровые фильтры могут анализировать параметры сигнала и принимать те или иные решения , например, вырабатывать управляющие команды. С помощью цифровых методов можно реализовать любой алгоритм обработки сигнала , который может быть описан совокупностью арифметических и логических операций. Точность обработки сигнала цифровыми фильтрами определяется точностью выполняемых расчетов. Она может быть несоизмерима выше точности обработки сигнала в аналоговых фильтрах. Одним из источников погрешности аналоговых фильтров является нестабильность их параметров , вызываемая колебаниями температуры , старением , дрейфом нуля , изменением питающих напряжений и т.д. В цифровых фильтрах эти неприятные эффекты отсутствуют. При разработке цифровых фильтров не возникает задача согласования нагрузок. Недостатком цифровых фильтров является их большая сложность по сравнению с аналоговыми , более высокая стоимость и не очень высокое быстродействие. В последние годы в связи с появлением микропроцессоров цифровая обработка сигналов получила еще более широкое распространение. Для цифровых фильтров стало возможным построение разнообразных частотных характеристик, путем их аналитической задачи. При этом реализуемы и фильтры традиционных типов: нижних частот, верхних частот, полосовые и режекторные.
В данном курсовом проекте необходимо реализовать цифровой фильтр нижних частот, основой микропроцессорной системы которого служит микроконтроллер КР1830ВЕ31.
2. Формализация задачи
Минимальная конфигурация МП-системы на основе набора БИС КР1830ВЕ31, КР1821РФ55, КР1821РУ55,совместно с ЦАП AD9708 и вспомогательными элементами определяет функциональную схему фильтра нижних частот, которая представлена на рис. 1.
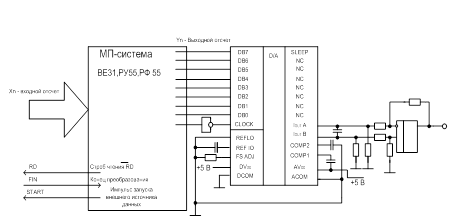
Рис. 1. Функциональная схема фильтра нижних частот.
Входное напряжение в виде кода поступает в порт РВ БИС РУ 55 с частотой дискретизации ![]() . Для формирования импульсов с частотой дискретизации
. Для формирования импульсов с частотой дискретизации ![]() будем использовать внутренний Т/С0 БИС КР1830ВЕ31, который должен работать в непрерывном режиме (без блокировки сигналом
будем использовать внутренний Т/С0 БИС КР1830ВЕ31, который должен работать в непрерывном режиме (без блокировки сигналом ![]() ). Поэтому выбираем режим 2 (с перезагрузкой после каждого цикла счета).
). Поэтому выбираем режим 2 (с перезагрузкой после каждого цикла счета).
Примем частоту задающего кварцевого генератора ![]() =12 МГц, тогда частота машинного цикла равна
=12 МГц, тогда частота машинного цикла равна ![]() =
= ![]() /12=1 МГц. Частота дискретизации
/12=1 МГц. Частота дискретизации ![]() =8,8 кГц, следовательно Т/С0 должен иметь в режиме с перезагрузкой коэффициент пересчета
=8,8 кГц, следовательно Т/С0 должен иметь в режиме с перезагрузкой коэффициент пересчета  . Так как максимальный коэффициент пересчета 8-разрядного счетчика равен
. Так как максимальный коэффициент пересчета 8-разрядного счетчика равен ![]() , для обеспечения требуемой частоты дискретизации в Т/С0 должно записываться число
, для обеспечения требуемой частоты дискретизации в Т/С0 должно записываться число
![]() .
.
Байт ![]() должен загружаться при инициализации МП системы.
должен загружаться при инициализации МП системы.
Необходимость хранения данных определяется видом заданного разностного уравнения. Для каждого цикла вычисления текущих выходных отсчетов ![]() требуется использовать выборку входных отсчетов
требуется использовать выборку входных отсчетов ![]() ,
, ![]() ,
, ![]() и выборку выходных отсчетов
и выборку выходных отсчетов ![]() ,
, ![]() . Также требуется сохранить в памяти два текущих произведения
. Также требуется сохранить в памяти два текущих произведения
![]() и
и ![]() .
.
Следовательно, 7 ячеек ОЗУ БИС РУ 55 при составлении программы определим для хранения данных в текущем цикле обработки входного сигнала (в текущем интервале дискретизации).
После вычисления выходного отсчета ![]() и записи его в ОЗУ, перед приемом нового входного отсчета необходимо сдвинуть отсчеты всех выборок в памяти:
и записи его в ОЗУ, перед приемом нового входного отсчета необходимо сдвинуть отсчеты всех выборок в памяти:
n-1-й отсчет на место n-2-го, n-й на место n-1-го. Это требуется для подготовки следующего цикла вычислений.
В результате вычисления разностного уравнения может получится так, что при 8-разрядном формате представления данных может получится результат, выходящий за пределы +1, -1, т.е. возникает переполнение разрядной сетки.
Для исключения переполнения разрядной сетки, введем масштабирование
входных отсчетов, путем умножения на коэффициент масштабирования ![]() .
.
![]() ;
;
![]() ;
;
![]() ;
;
Реальные значения коэффициентов разностного уравнения и коэффициента ![]() отличаются от расчетных, в виду ограничения разрядной сетки:
отличаются от расчетных, в виду ограничения разрядной сетки:
![]() =
=![]() =
=![]() ;
;
![]() ;
;
![]()
Вывод выходного отсчета ![]() осуществляется через порт РВ БИС РФ 55.
осуществляется через порт РВ БИС РФ 55.
Согласование кода МК и кода ЦАП необходимо, так как ЦАП преобразует в ток смещенный входной код (положительные числа), а арифметический код МК – дополнительный. Для согласования – вычисленный отсчет ![]() перед выводом на ЦАП суммируется с константой
перед выводом на ЦАП суммируется с константой ![]() .
.
При сбросе МК в указатель стека загружается адрес SP=70, - во внутренней памяти данных назначается стек (16 ячеек ОЗУ) с начальным адресом 70.
При включении питания в схеме МП – системы вырабатывается импульс сброса RST для МК. По сигналу RST =1 выполняются следующие действия:
1. Программный счетчик и все управляющие регистры МК, кроме PCON, IE, IP – устанавливаются в нулевое состояние;
2. В управляющих регистрах PCON, IE , IP – резервные биты принимают случайные значения, все остальные биты сбрасываются в 0;
3. В указателе стека устанавливается адрес SP=70 (вершина стека);
4. Запрещаются прерывания от всех источников, запрещается работа Т/С, запрещается работа последовательного порта;
5. Выбирается банк 0 РОН (текущий банк регистров);
6. Порты Р0, Р1, Р2, Р3 настраиваются на ввод для приема данных;
В БИС РФ 55 и РУ 55 исходное состояние после включения питания произвольное, так как импульс RST на их входы сброса не поступает.
Поэтому для перехода фильтра в рабочий режим, сначала необходима его настройка (инициализация).
Похожие работы
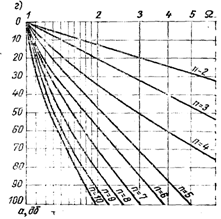

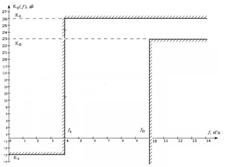
... целесообразно решать аппроксимационную задачу. Определим нормированную частоту ограничения фильтра, как отношение = = 0,6666. Нормированная частота в полосе задерживания обычного фильтра НЧ равна . Эта же частота в случае фильтра НЧ с ограниченной полосой пропускания рассчитывается по формуле Из кривых (рис. 1.) по вычисленной и заданным и а определим ...
... и 20-разрядном разрешении составляет 60-80 мс, а минимальное время преобразования АЦП HI-7159 для 18-разрядного разрешения и той же частоты режекции составляет 140 мс. В настоящее время ряд ведущих по аналого-цифровым ИМС фирм, такие как Analog Devices и Burr-Brown, прекратили производство АЦП многотактного интегрирования, полностью перейдя в области АЦ-преобразования высокого разрешения на сигма- ...
... для каждого звена составим разностные уравнения: 1) первое звено: ; 2) второе звено: ; 3) третье звено: . Результирующее разностное уравнение для цифрового фильтра будет иметь вид: .4 РАЗРАБОТКА АЛГОРИТМА ПРОГРАММЫ ПРОЕКТИРУЕМОГО УСТРОЙСТВА Прежде чем приступить к программированию устройства необходимо основательно изучить его внутреннюю структуру и возможности ресурсов. ...
... пропускают или задерживают сигналы, лежащие в определённых полосах частот. Фильтры можно классифицировать по их частотным характеристикам: 1. Фильтры нижних частот (ФНЧ) – пропускают все колебания с частотами не выше некоторой частоты среза и постоянную составляющую. 2. Фильтры верхних частот (ФНЧ) – пропускают все колебания не ниже некоторой частоты среза. 3. Полосовые фильтры (ПФ) – ...
0 комментариев