Краткая сравнительная характеристика коммутационных систем и выбор оптимальной
Постановка задачи проекта
Абонентские линии, типы, сигнализация
Архитектура и модули МС-240
Данные по телефонной нагрузке: согласно ВНТП1 12-98
Расчет и распределение нагрузки на сети
Расчет входящей нагрузки на АТСЦ
Математические методы анализа цифровых АТС
Определение надежности систем коммутации с ненадежными элементами
Программа мониторинга сети станций и настройка объектов мониторинга
Настройка объектов мониторинга
Отображение аварийных состояний и описание элементов Интерфейса
Авария потока Е1
Настройка критических значений МС-240 ЦПв3
Управление ЦАТС «МС240»
Управление маршрутизацией и межстанционными каналами
Обеспечение безопасности жизнедеятельности
Указания по технике безопасности
Особенности техники безопасности при работе с ЦАТС
Навигация
Математические методы анализа цифровых АТС
Реконструкция оборудования ОС п. Гастелло Жаркаинского района Акмолинской области на базе ЦАТС МС-240
160885
знаков
19
таблиц
39
изображений
3.2 Математические методы анализа цифровых АТС
3.2.1 Определение пропускной способности коммутационного поля
На рисунке 3.1 приведена структура системы коммутации каналов. На вход системы поступает простейший поток вызовов с параметрами λ. Для вызова, поступающего на вход системы, может потребоваться соединение с одним и только одним каналом, причем безразлично, с каким именно, и по какому пути. Длительность обслуживания для всех непотерянных вызовов предполагается независимой и распределена по одинаковому для всех вызовов экспоненциальному закону со средней длительностью обслуживания, равной μ-1 параметры коммутационного поля считается заданным.
Любой вызов обслуживается управляющим устройством, которое получает информацию о поступлении вызова, его требованиях и состоянии самого коммутационного поля.

ИН – источник нагрузки; ОП – обслуживающий прибор; КП – коммутационное поле; УУ – управляющее устройство
Рисунок 3.1 – Структура системы коммутации
На основании такой информации управляющее устройство принимает и осуществляет решение об обслуживании данного вызова, если в момент поступления вызова имеется хотя бы один свободный обслуживающий прибор и соединительный путь к нему через коммутационное поле, или отказе в обслуживании в противном случае. Предполагается, что дисциплина обслуживания зависит только от трех факторов: номера, которому принадлежит данный вызов, номера выхода (обслуживающего прибора или канала связи), с которым требуется соединение, то есть от того, какие именно соединения установлены к моменту поступления рассматриваемого вызова и какими именно путями соединения проходят. Предположим также, что занимаемые пути соединения определяются случайно, а решение об обслуживании и установлении принимается управляющим устройством с интенсивностью Мс.
Влияние управляющего устройства сказывается только на этапе установления соединения, которое абонент ощущает в виде задержек зуммерных сигналов “Ответ станции” и “Контроль посылки вызова”.
В уже установленное соединение, управляющее устройство никаких задержек не вносит. Задержки зуммерных сигналов нормируется Рекомендацией МККТТ Q.514 и вычисляются согласно формуле:
F(t+)=1-e-(Mc-λ) t (3.16)
где F(t+) – значении функции распределения времени ожидания (ФРВО) конца обслуживания вызова системой в момент tдоп.
Для расчета производительности управляющего устройства исходными являются параметры F(t+), tдоп , λ. Подставляя их в (3.16), итеративным приближением находим минимальную производительность управляющего устройства Мс.
Пропускная способность коммутационного поля рассчитывается независимо от параметров (производительности, быстродействия) управляющего устройства и приведена ниже:
π =![]()
где А=λ/μ – интенсивность поступающей нагрузки;
[0]=
Для полнодоступного пучка φХ=0, х=0, V-1, φv=1,
π=Ev(A)= (3.17)
(3.17)
Исходными для расчета пропускной способности коммутационного поля являются, параметры π и А. Подставляя их в (3.17), итеративным приближением находим минимальную емкость пучка, обеспечивающую требуемую пропускную способность.
На проектируемую систему коммутации задан поступающий простейший поток вызовов с нагрузкой А=90 Эрл. Средняя продолжительность разговора μ-1=3 минуты (μ=20ч-1, минимальная производительность управляющего устройства Мс=5,5 с-1. Определим функцию распределения времени ожидания конца обслуживания вызова системой коммутации каналов F(t+) на уровне tдоп=0,6с и минимальной емкости V=10 каналов. Находим параметр поступающего потока вызова λ=Α*μ=1800 ч-1=0,5 с-1.
Решение произведем на языке программирования Pascsal.
program 3.l6;
uses crt;
const e=3.27;
var Ft,ly,t,mc:real;
begin
clrscr;
writeln('e=',e:4:2);
write('inter ly=');read(ly);
write('inter t=');read(t);
write('inter mc=');read(mc);
Ft:=1-exp((-(mc-ly)*t)*ln(e));
writeln('Ft=',Ft:4:4);
end.
inter ly=0.5
inter t=0.6
inter mc=3
Ft=0.9714
program 3.17;
uses crt;
const v=10;
var Pi,A,ly,u,sum,fi,fv:real;
z:array[1..v] of integer;i:integer;
begin
clrscr;
write('inter ly=');read(ly);
write('inter u=');read(u);
writeln('inter v=',v);
A:=ly/u;
writeln('A=',A:4:4);
sum:=0;
fi:=1;
fv:=1;
for i:=1 to v do
fi:=fi*i;
sum:=sum+exp(i*ln(A))/fi;
fv:=fv*i;
Pi:=exp(v*ln(A))/fv;
writeln('Pi=',Pi:4:10);
end.
inter ly=0.5 inter u=3
inter v=10 Pi:=0,0000000001.
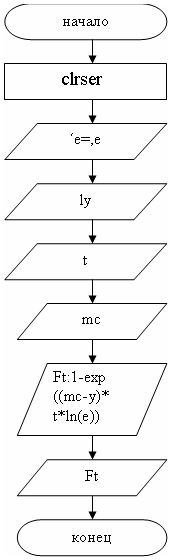
Рисунок 3.2 - Структурная схема алгоритма программы 3.16
0 комментариев