по Основам Теории Автоматического Управления
“Синтез последовательного корректирующего устройства”
Выполнил: Страхов Р. В.
Группа: K5-331
Принял: Беляков А. К.
Москва
Цель работы:
ü Синтез последовательного корректирующего устройства частотными методами;
ü Обеспечение отсутствия статической ошибки;
ü Оценка запасов устойчивости.
Вариант № 20В качестве исходных данных задана следующая передаточная функция:
|
| (1) |
и соответствующие параметры:
![]()
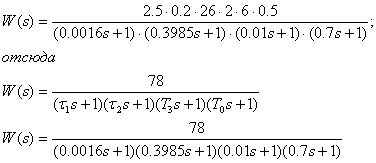
Представим исходную функцию в следующем виде:
|
| (2) |
где Т1 = 0,1; Т2 = 0,5; k = 150.
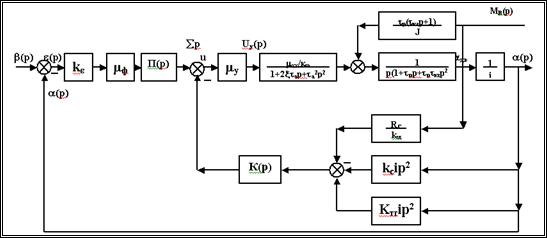
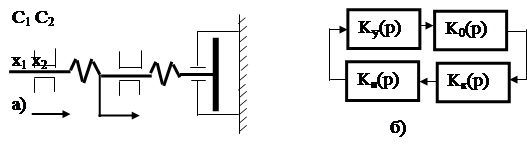
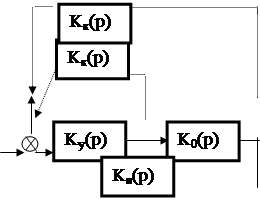
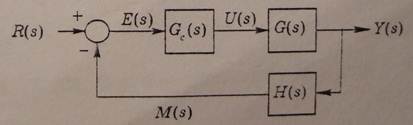
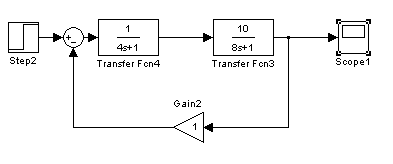
Построим структурную схему передаточной функции:

Для замкнутой системы составим систему дифференциальных уравнений:
|
| (3) |
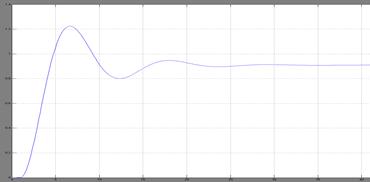
Для оценки времени регулирования tp1 исходной системы по системе дифференциальных уравнений (3) построим переходный процесс:
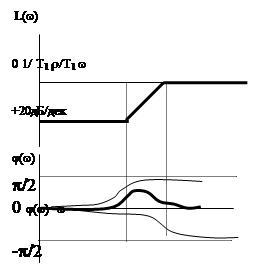
Для построения ЛАЧХ Wж(S) по заданным параметрам найдены характерные частоты:
|
|
|
|
По логарифмической характеристике Wж определены запасы устойчивости системы по амплитуде Нм и по фазе gс:
| Нм = | gс= |
По построенному графику была востановлена передаточная функция корректирующего устройства:
|
| (4) | ||||
| T1’ = 3,13 | T2’ = T2 =0,5 | T3’ = T1= 0,1 | T4’ = 0,095 | k1 = 0,1 | |
|
| (5) |
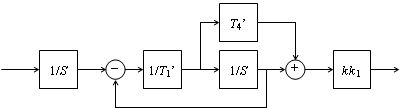
Построим структурную схему передаточной функции Wж(S):
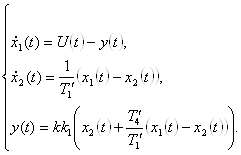
Для замкнутой системы составим систему дифференциальных уравнений:
|
| (6) |
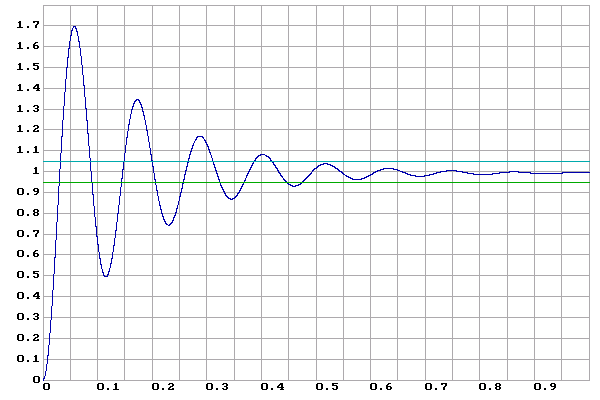
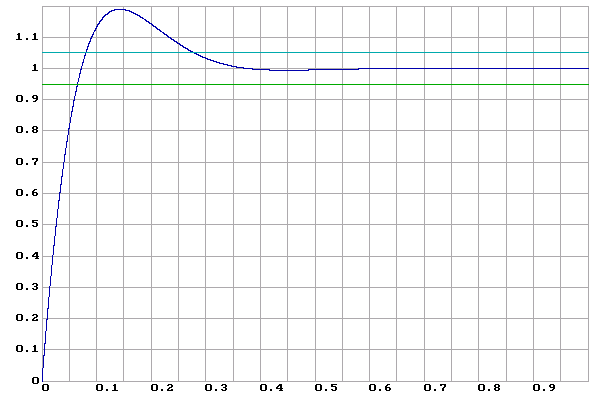
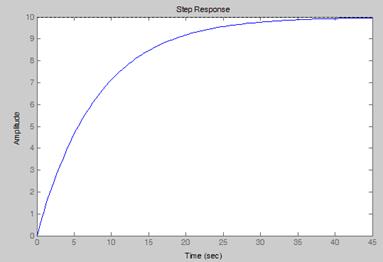
Для оценки времени регулирования tp2 желаемой системы по системе дифференциальных уравнений (6) построим переходный процесс:
В данной работе синтезировалось последовательное корректирующее устройство с помощью частотных методов. Для этого были построены логарифмические амплитудные характеристики желаемой и неизменяемой (исходной) систем. Далее путем вычитания одного графика из другого получена логарифмическая характеристика корректирующего устройства. По ней восcтановлена передаточная функция:
|
| (4) | ||||
| T1’ = 3,13 | T2’ = T2 =0,5 | T3’ = T1= 0,1 | T4’ = 0,095 | k1 = 0,1 | |
Полученная желаемая система с передаточной функцией
|
| (5) |
устойчива в замкнутом состоянии, имеет запасы устойчивости по фазе и модулю gс= ° и Нм = дБ, обеспечивающие нормальную работу системы.
Также для Wн(S)и Wж(S)=Wк(S)*Wн(S)построены переходные процессы, по графику которых определены времена регулирования tp1 = 0,475с и tp2 = 0,275с соответственно.
Благодаря корректирующему устройству удалось уменьшить время регулирования, а наибольшее значение перерегулирования полученной системы стало smax = 19% (для исходной системы smax = 70%), что находится в соответствии с условием поставленной задачи.
Похожие работы

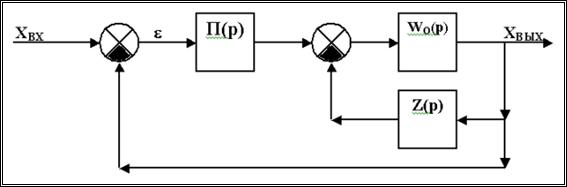

ьной обратной связью по току и по скорости Принципиальная схема проектируемой следящей системы. 1.1 Основные элементы принципиальной схемы следящей системы ФЧВ – фазочувствительный выпрямитель осуществляет выпрямление сигнала переменного тока в сигнал постоянного тока с учетом знака. П(р) – последовательное корректирующее устройство обеспечивает введение в закон управления сигнала ...
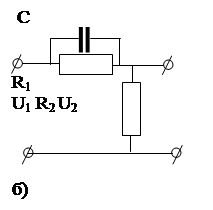
... : 1. По видам: последовательные и параллельные. 2. По типам: дифференцирующие, интегрирующие и интегро-диффе-ренцирующие. Последовательная коррекция. При последовательной коррекции корректирующее устройство включается последовательно в контур управления (рис. 1б). Рис. 1 При этом передаточная функция разомкнутой системы, независимо от места включения корректирующего устройства равна ...
... вариант To ko T1 T2 kc kв kQ kП ky T3 k3 ν σ c c c c % % 4-9 0.7 6 0.4 0.025 2.5 0.5 200 0.13 0.2 26 0.01 2 2 5 Введение Задача синтеза системы автоматического регулирования заключается в выборе такой её структуры, параметров, характеристик и способов их реализации, ...

... в смеситель воды. Рисунок 2.1 – Схема управления плотностью бумажной массы Далее рассмотрим структурную схему данной системы: Рисунок 2.2 – Структурная схема управления плотностью бумажной массы На этой схеме: Gc(s)-регулятор. Передаточная функция регулятора: Предположим, что k=10, тогда: G(s)-исполнительный механизм. Передаточная функция исполнительного механизма: ...
0 комментариев