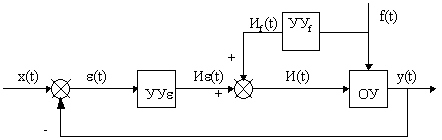
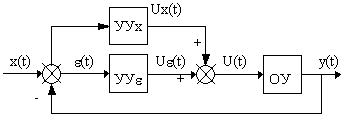
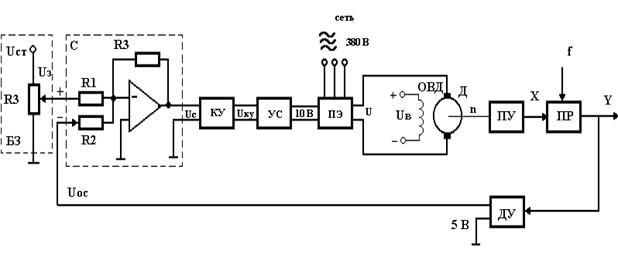
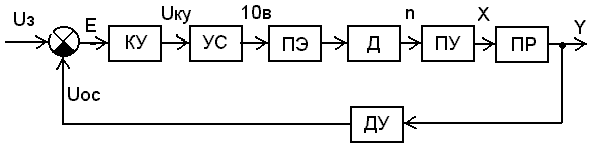
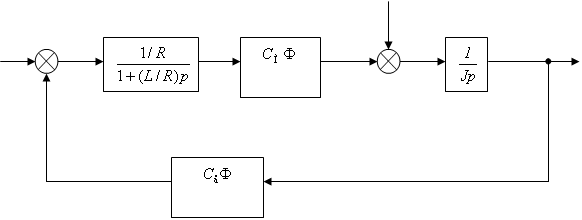
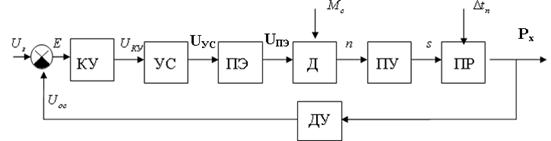
Синтез следящей системы с отрицательной обратной связью по току и по скорости
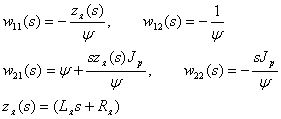
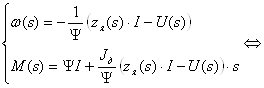
Уравнение второго сумматора
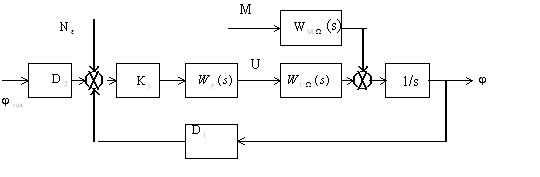
Построение обратной логарифмической частотной характеристики неизменяемой части системы
Синтез последовательного корректирующего устройства
Проверка устойчивости внутреннего контура системы
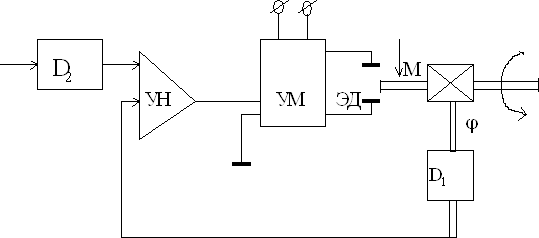
Расчет элементов следящей системы
Навигация
Синтез следящей системы с обратной связью по току и по скорости
Синтез следящей системы с обратной связью по току и по скорости
21262
знака
4
таблицы
8
изображений
Введение
Состояние любого технического устройства характеризуется одной или несколькими физическими величинами.
Совокупность предписаний, определяющих характер изменения выходных величин объектов, называется алгоритмом функционирования.
К основным алгоритмам функционирования систем автоматического управления относятся:
· поддержание постоянного значения (стабилизации) управляемой переменной, ![]() ;
;
· изменение управляемой величины по заданному закону;
· изменение управляемой переменной по заранее не известному закону.
В зависимости от этого системы автоматического управления делят на:
o стабилизирующие системы;
o системы программного управления;
o следящие системы.
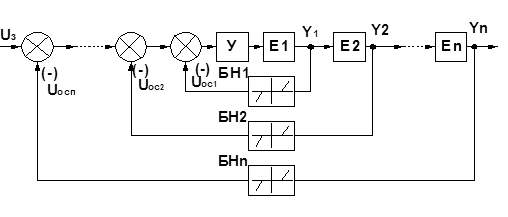
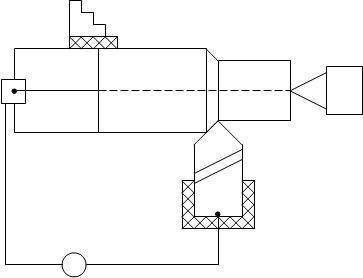
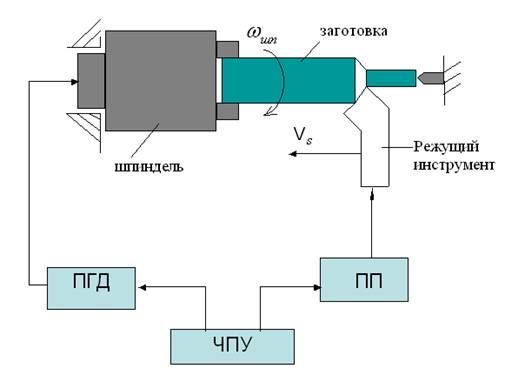
В курсовом проекте рассматривается синтез следящей системы с обратной связью по току и по скорости. В следящих системах характер изменения управляющего воздействия заранее не может быть точно установлен, так как этот характер определяется процессами, протекающими вне системы. Следящие системы предназначены для измерения управляемой величины по произвольному закону, например, для изменения положения радиолокационной антенны в зависимости от движения цели, траектория которого заранее не известна.
В качестве метода синтеза применяется метод обратных амплитудно-частотных характеристик.
Исходные данные
| Суммарная ошибка |
|
| Скорость изменения задающего воздействия |
|
| Ускорение изменения задающего воздействия |
|
| Третья производная изменения задающего воздействия |
|
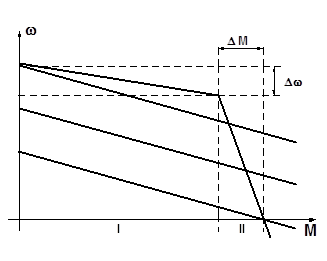
| Отношение моментов |
|
| Перерегулирование |
|
| Быстродействие |
|
| Момент инерции |
|
| Передаточное число редуктора |
|
Тип исполнительного двигателя МИ-22.
Технические данные двигателя.
| Номинальная мощность |
|
| Номинальное напряжение |
|
| Номинальный ток |
|
| Сопротивление силовой цепи |
|
| Частота вращения |
|
| Момент инерции двигателя |
|
| КПД двигателя |
|
Выберем электромашинный усилитель:
![]() .
.
Электромашинный усилитель ЭМУ-3А3.
Тип усилителя и его параметры.
| Номинальная мощность |
|
| Номинальное напряжение |
|
| Номинальный ток |
|
| Частота вращения |
|
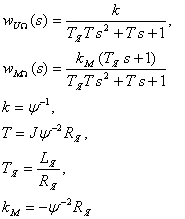
| Коэффициент усиления |
|
| Постоянная времени |
|
| Коэффициент демпфирования |
|
Похожие работы

... при которых работа ЭП удовлетворяет требования техпроцесса. Основное требование к системе управления - обеспечение допустимого значения ошибки управления e(t) = х(t)-y(t) в установившихся и переходных режимах, что определяется статическими и динамическими характеристиками САУ ЭП. Статическая характеристика замкнутой СУЭП - зависимость регулируемой переменной от основного возмущающего воздействия ...
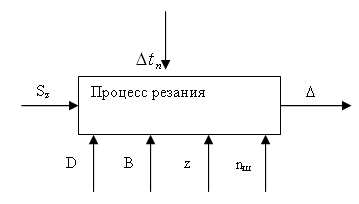
ости обработки. Для измерения этой температуры и управления процессом обработки наибольшее распространение нашел метод естественной термопары, образованной инструментом и деталью. Развиваемая естественной термопарой термо-ЭДС позволяет построить АСУ ТП, поддерживающую заданный температурный режим с точностью 2...3 %. Для успешного построения системы стабилизации температуры резания (СТР) ...
... Национальный Технический Университет Кафедра Технической кибернетики ПОЯСНИТЕЛЬНАЯ ЗАПИСКА к курсовому проекту по курсу «Проектирование систем автоматического управления» «Проектирование системы автоматического регулирования угла поворота вала электродвигателя» Выполнила: ст. гр. А – 61з Брусинов С. Э. Проверил: Дубовик С.А. Оценка ________________ Дата «____» ...


... этого коэффициента и вводила в основной контур корректирующий сигнал, обратно пропорциональный коэффициенту передачи процесса резания. При этом управляющее воздействие привода подачи изменится, значит изменится и скорость вращения двигателя, а следовательно и подача, причем ее изменение будет пропорционально изменению коэффициента резания. 7. Выбор метода и алгоритма адаптивного управления ...
0 комментариев