Навигация
Теория оптимального приема сигналов
23341
знак
0
таблиц
0
изображений
ТЕОРИЯ ОПТИМАЛЬНОГО ПРИЕМА СИГНАЛОВ
1 Основные положения теории оптимального приема сигналов
Прием сигналов – одна из наиболее сложных теоретических и инженерных задач передачи сообщений. Сложность состоит в том, что в пункте приема сообщения необходимо извлекать из модулированных сигналов-переносчиков, которые в процессе прохождения по линии связи не только ослабляются, но и подвергаются воздействиям различных искажающих факторов и помех.
Весьма желательно располагать методами приема, которые были бы наилучшими (оптимальными) в данных конкретных условиях. Направление, связанное с отысканием таких методов, называется теорией оптимального приема.
Теоретической основой решения задач оптимального приема является теория Байеса.
Пусть некоторая случайная физическая величина, которую назовем причиной, может принимать множество значений(исходов) П с плотностью вероятностей р(П), которая считается априорной(заранее известной). Пусть причина вызывает появление другой случайной величины – следствия С, которое также может принимать множество значений. Плотность вероятностей этих значений зависит от конкретных исходов причины. Поэтому ситуация описывается множеством условных плотностей вероятностей р(С/П).
Статистическим решением называют процедуру, которая состоит в том, чтобы, наблюдая конкретное следствие ![]() , указывать вызвавшую его причину
, указывать вызвавшую его причину ![]() . Так как наблюдаемое следствие
. Так как наблюдаемое следствие ![]() может быть вызвано любым исходом причины П, то можно определить плотность вероятностей всех возможных исходов, которые могли вызвать данное следствие, т.е. определить функцию р(П/
может быть вызвано любым исходом причины П, то можно определить плотность вероятностей всех возможных исходов, которые могли вызвать данное следствие, т.е. определить функцию р(П/![]() ). Эта функция называется апостериорной (послеопытной, установленной на основе имевшего место опыта или наблюдения) плотностью вероятностей причин.
). Эта функция называется апостериорной (послеопытной, установленной на основе имевшего место опыта или наблюдения) плотностью вероятностей причин.
Основой для принятия статистического решения является теорема Байеса
![]() (1)
(1)
где р(С/П) – условная плотность распределения следствий;
р(С) – безусловная плотность распределения следствий С, определяемая как
![]() .
.
Значение этого интеграла не зависит от П, поскольку интегрирование по этой переменной ведется по всей области ее существования Г.
Из (1) следует, что апостериорная плотность вероятностей причины р(П/С) зависит от априорной плотности вероятностей причины р(П) и условной плотности вероятностей следствий р(С/П). плотность р(С/П) является функцией П, ее называют функцией правдоподобия.
В теории статистических решений показано, что при принятии решения о конкретном значении действовавшей причины ![]() , вызвавшей наблюдаемое (или заданное) следствие
, вызвавшей наблюдаемое (или заданное) следствие ![]() , наименьшую ошибку можно совершить, если выносить решение в пользу того значения причины, при которой условное распределение р(П/
, наименьшую ошибку можно совершить, если выносить решение в пользу того значения причины, при которой условное распределение р(П/![]() ) имеет наибольшее значение. Такое правило принятия решения называется байесовским.
) имеет наибольшее значение. Такое правило принятия решения называется байесовским.
Если априорная плотность р(П) неизвестна, то самое большее, что можно сделать – предположить равномерность ее распределения. Тогда решение будет выноситься в пользу того значения причины ![]() , при котором функция правдоподобия р(С/П) для наблюдаемого следствия
, при котором функция правдоподобия р(С/П) для наблюдаемого следствия ![]() принимает наибольшее значение. Это означает, что такое значение причины считается наиболее правдоподобным среди других возможных значений. Подобная процедура принятия решения называется правилом максимального правдоподобия.
принимает наибольшее значение. Это означает, что такое значение причины считается наиболее правдоподобным среди других возможных значений. Подобная процедура принятия решения называется правилом максимального правдоподобия.
Применим изложенный подход к решению задачи оптимального приема сигналов.
Суть процедуры оптимального приема. Установлено, что между колебаниями и векторами можно установить взаимно-однозначное соответствие. Поэтому вместо колебаний можно рассматривать соответствующие векторы. Исходя из этого, будем считать причиной П случайный вектор х, соответствующий передаваемым сообщениям (или однозначно связанный с ним вектор сигналов s, переносящих эти сообщения), а следствием С – случайный вектор у, соответствующий смеси сигнала шума на входе приемника. С учетом сказанного (1) можно записать либо в виде
![]() (2)
(2)
либо в эквивалентном выражению (2) виде
![]() (3)
(3)
где x,s,y – векторы в многомерных пространствах, соответствующие сообщениям x(t), сигналам s(t)=s[x(t),t] и входным реализациям y(t)=s(t)+n(t).
При передаче дискретных сообщений множество сообщений x(t) может принимать только конечное число дискретных значений![]() , которому однозначно соответствует конечное число различающихся сигналов
, которому однозначно соответствует конечное число различающихся сигналов ![]()
Оптимальная процедура приема состоит в определении величин р(s/ y) для всех М значений ![]() , сравнения этих величин между собой и выборе наибольшей из них. Значение
, сравнения этих величин между собой и выборе наибольшей из них. Значение ![]() , которому соответствует максимальная величина р(
, которому соответствует максимальная величина р(![]() /y)
/y)
считается переданным сигналом и в соответствии с этим на выходе приемника воспроизводится сообщение ![]() .
.
Основная трудность при решении такой задачи связана с нахождением апостериорного распределения р(s/ y). Наиболее детально задача решена для помехи типа гауссовского белого шума и набора сигналов, заранее известных в точке приема. Если при этом все сообщения ![]() равновероятны и независимы, то выражение для р(s/y) можно привести к виду
равновероятны и независимы, то выражение для р(s/y) можно привести к виду
![]() (4)
(4)
где ![]() - односторонняя спектральная плотность мощности белого гауссовского шума;
- односторонняя спектральная плотность мощности белого гауссовского шума;
А – некоторая константа.
Нахождение сигнала ![]() , максимизирующего величину(4) при наблюдении на входе приемника некоторой реализации y(t), эквивалентно минимизации показателя экспоненты. Следовательно, оптимальный приемник должен выносить решение о приеме того сигнала
, максимизирующего величину(4) при наблюдении на входе приемника некоторой реализации y(t), эквивалентно минимизации показателя экспоненты. Следовательно, оптимальный приемник должен выносить решение о приеме того сигнала![]() , при котором функция р(
, при котором функция р(![]() / y) достигает максимума, а величина
/ y) достигает максимума, а величина
![]() (5)
(5)
соответственно становится минимальной.
Учитывая свойства векторного представления функций времени, от выражения(5), можно перейти к эквивалентному ему выражении.
 (6)
(6)
Выражение(5) или (6) представляет собой алгоритм работы оптимального приемника дискретных сообщений. Работая по этому алгоритму, оптимальный приемник должен вычислить значения величины ![]() для всех М, используемых в системе сигналов
для всех М, используемых в системе сигналов ![]() (где j-1,2,…,М), сравнить их между собой, выбрать наименьшее значение и воспроизвести на выходе соответствующее ему дискретное сообщение.
(где j-1,2,…,М), сравнить их между собой, выбрать наименьшее значение и воспроизвести на выходе соответствующее ему дискретное сообщение.
Иными словами, оптимальный приемник всегда воспроизводит на выходе сообщение, переносимое тем сигналом, к которому наиболее близка входная реализация y(t). В геометрической интерпретации это означает, что оптимальный приемник всегда относит вектор входной реализации y к ближайшему вектору сигнала.
Очевидно, что прием сигналов в присутствии шума может приводить к ошибкам, поскольку вектор входной реализации случаен и с некоторой вероятностью может попасть в любую точку пространства. Допустим, что вектор y, образованный из переданного сигнала ![]() и шума n, попал в точку, наиболее близко расположенную к вектору сигнала
и шума n, попал в точку, наиболее близко расположенную к вектору сигнала ![]() .
.
Если i=j, то приемник примет правильное решение, если же ![]() , то решение приемника окажется ошибочным и вместо переданного сообщения
, то решение приемника окажется ошибочным и вместо переданного сообщения ![]() он ошибочно воспроизведет сообщение
он ошибочно воспроизведет сообщение ![]() .
.
Несмотря на то, что оптимальный приемник дискретных сообщений может допускать ошибочные решения, их вероятность у этого приемника минимальна по сравнению с любыми реальными приемниками таких сообщений.
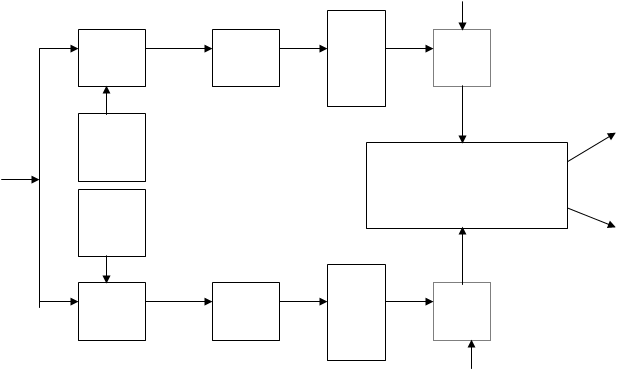
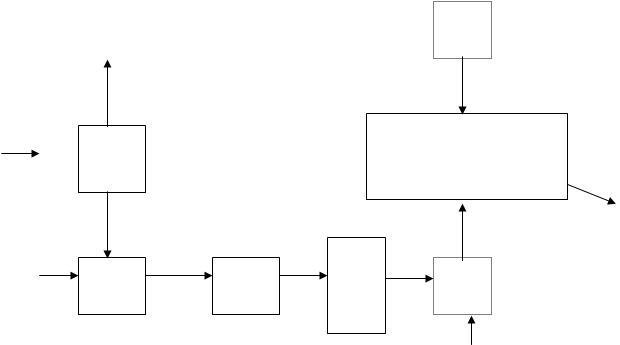
Исследования показывают, что алгоритм может быть представлен в более удобном для схемной реализации виде и позволяет получить структурные схемы оптимальных приемников и выражения для расчета помехоустойчивости.
Похожие работы
... открытую ими новую область устремились сотни ученых, и сегодня виден тот колоссальный прогресс, который достигнут благодаря их усилиям. Можно, по-видимому, утверждать, что именно в области теории оптимального приема М-сигналов были получены наиболее значительные для прогресса в области телекоммуникаций результаты, который без нее был бы недостижим. Эти результаты, являющиеся итогом коллективного ...
... работы необходимо начинать с приобретения методических руководств к курсовой работе Ниеталина Ж.Н. и Ниеталиной Ж.Ж. «Электрлiк байланыс теориясы» выпущенной в Алма-Ате в 1999 году, Ниеталина Ж.Н. и Ниеталиной Ж.Ж. «Теория электрической связи» учебное пособие к курсовой работе. Алма-Ата 2001г., а также учебное пособие Зюко А.Г. и др. «Теория передачи сигналов» – М.; «Связь» 1988г., «Теория ...
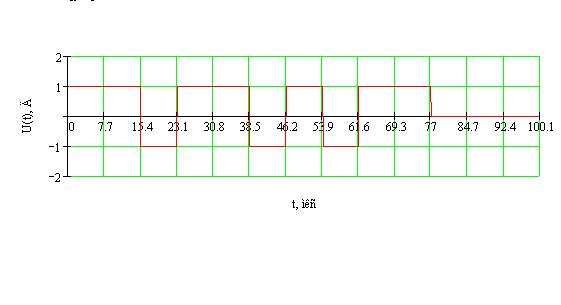
... фильтра является величиной конечной. так как отклик фильтра не может появиться раньше чем придет воздействие то to ³ Tc. 2) длительность Tc < ¥ Þ оптимальная фильтрация применима лишь для импульсных сигналов. При синтезе СФ в качестве входного аналогового сигнала в курсовой работе используется импульсный сигнал, построенный в соответствии с какой либо бинарной кодовой ...
... модуляцией, можно сделать вывод, что помехоустойчивость приемника, использующего в качестве информационного параметра фазу, почти приближена к вероятности ошибки приемника Котельникова. 3. Оптимальная фильтрация. Отметим, что оптимальный приемник, является корреляционным, сигнал на его выходе представляет собой функцию корреляции принимаемого и ожидаемого сигналов, благодаря чему ...
0 комментариев