Навигация
Тиристорные преобразователи частоты: назначение, типы, структурная схема. Коротко о частотно-регулируемом приводе
69017
знаков
4
таблицы
18
изображений
Тиристорные преобразователи частоты: назначение, типы, структурная схема.
Коротко о частотно-регулируемом приводе
Введение
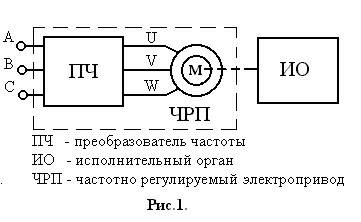
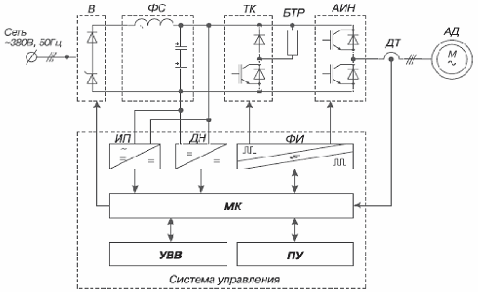
Современный частотно регулируемый электропривод состоит из асинхронного или синхронного электрического двигателя и преобразователя частоты (см. рис.1.).
Электрический двигатель преобразует электрическую энергию в механическую энергию и приводит в движение исполнительный орган технологического механизма.
Преобразователь частоты управляет электрическим двигателем и представляет собой электронное статическое устройство. На выходе преобразователя формируется электрическое напряжение с переменными амплитудой и частотой.
Название «частотно регулируемый электропривод» обусловлено тем, что регулирование скорости вращения двигателя осуществляется изменением частоты напряжения питания, подаваемого на двигатель от преобразователя частоты.
На протяжении последних 10 –15 лет в мире наблюдается широкое и успешное внедрение частотно регулируемого электропривода для решения различных технологических задач во многие отрасли экономики. Это объясняется в первую очередь разработкой и созданием преобразователей частоты на принципиально новой элементной базе, главным образом на биполярных транзисторах с изолированным затвором IGBT.
В настоящей статье коротко описаны известные сегодня типы преобразователей частоты, применяемые в частотно регулируемом электроприводе, реализованные в них методы управления, их особенности и характеристики.
При дальнейших рассуждениях будем говорить о трехфазном частотно регулируемом электроприводе, так как он имеет наибольшее промышленное применение.
О методах управления
В синхронном электрическом двигателе частота вращения ротора ![]() в установившемся режиме равна частоте вращения магнитного поля статора
в установившемся режиме равна частоте вращения магнитного поля статора ![]()
В асинхронном электрическом двигателе частота вращения ротора ![]() в установившемся режиме отличается от частоты вращения
в установившемся режиме отличается от частоты вращения ![]() на величину скольжения
на величину скольжения ![]() .
.
Частота вращения магнитного поля ![]() зависит от частоты напряжения питания. При питании обмотки статора электрического двигателя трехфазным напряжением с частотой
зависит от частоты напряжения питания. При питании обмотки статора электрического двигателя трехфазным напряжением с частотой ![]() создается вращающееся магнитное поле. Скорость вращения этого поля определяется по известной формуле
создается вращающееся магнитное поле. Скорость вращения этого поля определяется по известной формуле
![]() =
= ![]() ,
,
где ![]() – число пар полюсов статора.
– число пар полюсов статора.
Переход от скорости вращения поля ![]() , измеряемой в радианах, к частоте вращения
, измеряемой в радианах, к частоте вращения ![]() , выраженной в оборотах в минуту, осуществляется по следующей формуле
, выраженной в оборотах в минуту, осуществляется по следующей формуле
![]() =
= ![]() ,
,
где 60 – коэффициент пересчета размерности.
Подставив в это уравнение скорость вращения поля, ![]() получим, что
получим, что
![]() =
= ![]() .
.
Таким образом, частота вращения ротора синхронного и асинхронного двигателей зависит от частоты напряжения питания.
На этой зависимости и основан метод частотного регулирования.
Изменяя с помощью преобразователя частоту ![]() на входе двигателя, мы регулируем частоту вращения ротора.
на входе двигателя, мы регулируем частоту вращения ротора.
В наиболее распространенном частотно регулируемом приводе на основе асинхронных двигателей с короткозамкнутым ротором применяются скалярное и векторное частотное управление.
При скалярном управлении по определенному закону изменяют амплитуду и частоту приложенного к двигателю напряжения. Изменение частоты питающего напряжения приводит к отклонению от расчетных значений максимального и пускового моментов двигателя, к.п.д., коэффициента мощности. Поэтому для поддержания требуемых рабочих характеристик двигателя необходимо с изменением частоты одновременно соответственно изменять и амплитуду напряжения.
В существующих преобразователях частоты при скалярном управлении чаще всего поддерживается постоянным отношение максимального момента двигателя к моменту сопротивления на валу. То есть при изменении частоты амплитуда напряжения изменяется таким образом, что отношение максимального момента двигателя к текущему моменту нагрузки остается неизменным. Это отношение называется перегрузочная способность двигателя.
При постоянстве перегрузочной способности номинальные коэффициент мощности и к.п.д. двигателя на всем диапазоне регулирования частоты вращения практически не изменяются.
Максимальный момент, развиваемый двигателем, определяется следующей зависимостью
![]() =
= ![]() ,
,
где ![]() - постоянный коэффициент.
- постоянный коэффициент.
Поэтому зависимость напряжения питания от частоты определяется характером нагрузки на валу электрического двигателя.
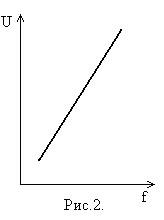
Для постоянного момента нагрузки поддерживается отношение U/f = const, и, по сути, обеспечивается постоянство максимального момента двигателя. Характер зависимости напряжения питания от частоты для случая с постоянным моментом нагрузки изображен на рис. 2. Угол наклона прямой на графике зависит от величин момента сопротивления и максимального крутящего момента двигателя.
Вместе с тем на малых частотах, начиная с некоторого значения частоты, максимальный момент двигателя начинает падать. Для компенсации этого и для увеличения пускового момента используется повышение уровня напряжения питания.
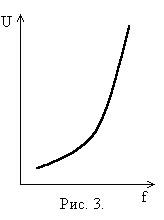
В случае вентиляторной нагрузки реализуется зависимость U/f2 = const. Характер зависимости напряжения питания от частоты для этого случая показан на рис.3. При регулировании в области малых частот максимальный момент также уменьшается, но для данного типа нагрузки это некритично.
Используя зависимость максимального крутящего момента от напряжения и частоты, можно построить график U от f для любого типа нагрузки.
Важным достоинством скалярного метода является возможность одновременного управления группой электродвигателей.
Скалярное управление достаточно для большинства практических случаев применения частотно регулируемого электропривода с диапазоном регулирования частоты вращения двигателя до 1:40.
Векторное управление позволяет существенно увеличить диапазон управления, точность регулирования, повысить быстродействие электропривода. Этот метод обеспечивает непосредственное управление вращающим моментом двигателя.
Вращающий момент определяется током статора, который создает возбуждающее магнитное поле. При непосредственном управлении моментом необходимо изменять кроме амплитуды и фазу статорного тока, то есть вектор тока. Этим и обусловлен термин «векторное управление».
Для управления вектором тока, а, следовательно, положением магнитного потока статора относительно вращающегося ротора требуется знать точное положение ротора в любой момент времени. Задача решается либо с помощью выносного датчика положения ротора, либо определением положения ротора путем вычислений по другим параметрам двигателя. В качестве этих параметров используются токи и напряжения статорных обмоток.
Менее дорогим является частотно регулируемый электропривод с векторным управлением без датчика обратной связи скорости, однако векторное управление при этом требует большого объема и высокой скорости вычислений от преобразователя частоты.
Кроме того, для непосредственного управления моментом при малых, близких к нулевым скоростям вращения работа частотно регулируемого электропривода без обратной связи по скорости невозможна.
Векторное управление с датчиком обратной связи скорости обеспечивает диапазон регулирования до 1:1000 и выше, точность регулирования по скорости – сотые доли процента, точность по моменту – единицы процентов.
В синхронном частотно регулируемом приводе применяются те же методы управления, что и в асинхронном.
Однако в чистом виде частотное регулирование частоты вращения синхронных двигателей применяется только при малых мощностях, когда нагрузочные моменты невелики, и мала инерция приводного механизма. При больших мощностях этим условиям полностью отвечает лишь привод с вентиляторной нагрузкой. В случаях с другими типами нагрузки двигатель может выпасть из синхронизма.
Для синхронных электроприводов большой мощности применяется метод частотного управления с самосинхронизацией, который исключает выпадение двигателя из синхронизма. Особенность метода состоит в том, что управление преобразователем частоты осуществляется в строгом соответствии с положением ротора двигателя.
О преобразователях частоты
Преобразователь частоты – это устройство, предназначенное для преобразования переменного тока (напряжения) одной частоты в переменный ток (напряжение) другой частоты.
Выходная частота в современных преобразователях может изменяться в широком диапазоне и быть как выше, так и ниже частоты питающей сети.
Схема любого преобразователя частоты состоит из силовой и управляющей частей. Силовая часть преобразователей обычно выполнена на тиристорах или транзисторах, которые работают в режиме электронных ключей. Управляющая часть выполняется на цифровых микропроцессорах и обеспечивает управление силовыми электронными ключами, а также решение большого количества вспомогательных задач (контроль, диагностика, защита).
Преобразователи частоты, применяемые в регулируемом электроприводе, в зависимости от структуры и принципа работы силовой части разделяются на два класса:
Похожие работы
... достоверность диагностики режима работы установки и выявления неисправностей. Кроме перечисленных выше, станция управления АСУС-02 обладает следующими возможностями: - точная автоматизированная балансировка станка-качалки; - подсчет потребленной электроэнергии; - определение производительности скважинной установки по динамограмме; - оценка динамики изменения дебита скважины; - часовой (за ...





... о выборе лучшего варианта привода принимается на основе сопоставления приведенных затрат на одинаковый объем выпускаемой продукции. В данном проекте необходимо обеспечить регулирование продолжительности времени выпечки с коррекцией по температуре во второй зоне пекарной камеры. При этом необходимо учитывать, что производительность печи при замене системы привода меняться не должна, а также ...

... 2.1 Разработка и обоснование алгоритма функционирования и структурной схемы проектируемого устройства На основе проведенного исследования методов и устройств компенсации реактивной мощности в системах электроснабжения преобразовательных установок поставим задачу проектирования. Необходимо синтезировать устройство компенсации реактивной мощности для систем электроснабжения преобразовательных ...
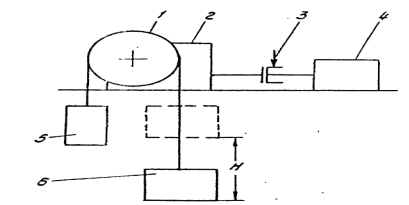
... режим работы, обеспечить выполнение требований по ускорению лифта и возможность его работы с разными грузами на подъем и на спуск. Кинематическая схема электропривода приведена на рисунке 1. Рисунок 1 - Кинематическая схема электропривода грузового лифта:1 – канатоведущий шкив; 2 –редуктор; 3 – тормозной шкив; 4 – двигатель; 5 – клеть; 6 – противовес. Технические данные транспортера ( ...
0 комментариев