Навигация
Описание интерфейса между системой и пользователем
23575
знаков
0
таблиц
4
изображения
1.3 Описание интерфейса между системой и пользователем
На основании списка функций выполняемых системой определим интерфейс между системой и пользователем.
Внешний вид передней панели цифрового тахометра представлен на рисунке 1.

![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Рисунок 1 - Внешний вид передней панели тахометра
На передней панели расположены четыре цифровых индикатора, на которых выводится значения измеряемой величины.
Включения тахометра производят клавишей «POWER»
2. Предварительное проектирование системы
2.1 Разбиение системы на модули
Из выше перечисленных функций следует, что в состав проектируемого цифрового тахометра должны войти следующие модули.
Модуль аналого-цифрового преобразователя, который будет выполнять функцию преобразования импульсов в цифровой код.
Преобразования двоичного кода в двоично-десятичный будет, осуществляется при помощи модуля преобразования в двоично-десятичный код.
Модуль индикации необходим для отображения значения измеряемой частоты.
Обработка данных вводимых из АЦП (выделение знака, определение размерности) осуществляется модулем обработки.
Преобразование значений импульсов в символьное значение для знакоразрядного индикатора осуществляется модулем преобразования в семисегментный код.
Управление работой тахометра в целом будет, осуществляется при помощи микрокомпьютера. Так как микрокомпьютер, является последовательным устройством, которое выполняет одну команду за другой, в модульный состав необходимо включить исполнительный модуль, который будет обеспечивать последовательное исполнение системой функций.
2.2 Выбор соотношения между аппаратными и программными средствами
В результате анализа функций, выполняемых системой, и на основании модульной структуры произведем разбиение системы на аппаратные и программные модулями. Полученная модульная структура цифрового тахометра представлена на рисунке 2.
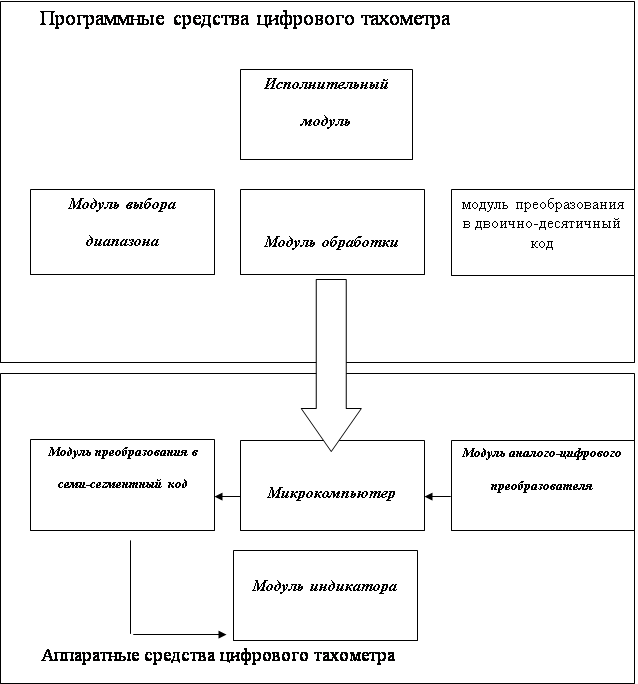
Рисунок 2 – Соотношения между программными аппаратными модулями в цифровом тахометре
Связь между программными модулями и модулем микрокомпьютера показана двойной стрелкой, так как программные модули реализуются как процедуры микрокомпьютера.
Таким образом, программным методом реализована следующая группа функций: преобразование двоичного кода в двоично-десятичный, обработка данных.
Из выше перечисленных, реализованных программным методом, функций две (преобразование двоичного кода в двоично-десятичный), возможно, было реализовать и аппаратно. Однако они реализованы программно по следующим причинам:
решение этих задач не критично по времени;
реализация данных функции аппаратно сложная задача и требует включения в состав устройства большого количества логических ИМС.
Аппаратным методом реализованы модули аналого-цифрового преобразователя, масштабирующего устройства, модуль переключателя, модуль индикации и преобразователь в семисегментный код.
Модуль преобразователя в семисегментный код строится аппаратно так как его программная реализация потребовало бы вывода двадцатичетырех разрядного слова вместо шестнадцати, что не приведет к уменьшению аппаратных затрат.
Также в состав аппаратных средств вошел микрокомпьютер, который содержит в себе необходимые элементы, позволяющие реализовать все необходимые программные действия системы.
3. Проектирование аппаратных средств системы
3.1 Разработка принципиальной схемы системы
Основу проектируемого устройства составляет центральный процессор (ЦП). В разрабатываемом цифровом тахометре ЦП строится на основе микропроцессора 8086. При разработке структуры блока ЦП возникают задачи разделения (демультиплексирования) шины адреса/данных буферирования шин адреса и шин данных, а также выработка тактовых импульсов и синхронизация сигналов REDY и RESET с тактовыми сигналами микропроцессора.
Первая задача решается с помощью БИС КР580ИР82, выполняющих функции адресной защелки. Поэтому на принципиальной схеме два 8 – битовых регистра КР580ИР82 (DD12 и DD13) обеспечивают запоминание 11 разрядов адреса.
Вторая задача решается с помощью двух 8 – битовых шинных формирователей КР580ВА86 (DD14 и DD15), которые усиливают сигналы системной шины.
Выработка тактовых импульсов и синхронизация сигналов REDY и RESET с тактовыми сигналами микропроцессора выполняется генератором тактовых импульсов (ГТИ) КР1810ГФ84. Ко входом X1 и X2 БИС КР1810ГФ84 (DD6) подключается кварцевый резонатор РК374 (ZQ1) с частотой колебаний – 15 МГц.
На вход RDY БИС КР1810ГФ84 поступает сигнал готовности от блока АЦП.
Сброс МП осуществляется сигналом RESET, который вырабатывается в момент включения питания. Выработка сигнала RESET осуществляется RC цепочкой построенной на элементах C1 и R8. Выбор номиналов элементов C1 и R8 производят исходя из того, что минимальная продолжительность сигнала RESET, при первом включении МП должна составлять не менее 50 мкс. При номиналах C1 = 1мкф и R8 = 200кОм получим длительность сигнала сброса равную:
 ( 1 )
( 1 )
где Ucc - напряжение источника питания;
Uh - напряжение логической единицы на входе RES.
Из формулы ( 1 ) видно, что при выбранных номиналах элементов достигается необходимая длительность сигнала сброса.
В разрабатываемой системе блок ПЗУ построен из двух включенных параллельно БИС КР556РТ6 (DD16 и DD19) емкостью 2 Кбайта каждая. Адресные входы А0 – А10 каждой бис соединены параллельно и подключены к адресным линиям А0 – А10. Процесс обращения к ПЗУ стробируется сигналами M/IO и RD подаваемыми на входы CS БИС. Выдача данных на шину микропроцессора после установки адресов микросхемой памяти осуществится не позднее чем, через 80 нс. Так как в МП 8086 длительность цикла чтения длится дольше, то выбранные для построения памяти микросхемы смогут передавать информацию с максимальной пропускной способностью шины.
Для преобразования импульса в код используется микросхема АЦП КР1113ПВ1 (DD3). Микросхема КР1113ПВ1 – это биполярный, десяти разрядный АЦП, с динамическим диапазонам от –5.5В до +5.5В и выдачей данных в прямом коде.
Данная микросхема имеет внутренний буфер, что позволяет подключать ее непосредственно к шине данных. Управления началом преобразования и выдачей данных на шину осуществляется логической схемой собранной на элементах DD4, DD5, DD8 и DD11. Если микропроцессор не обращается к АЦП, то низким уровнем на входе логического элемента И (DD8) триггер готовности (DD11) удерживается в единичном состоянии. При этом на входе RDY БИС КР1810ГФ84 присутствует высокий уровень напряжения (устройство готово), а выходы данных АЦП находятся в третьем состоянии. При обращении к АЦП на одном входе элемента И будет присутствовать высокий уровень напряжения, а состояния на другом будет определятся сигналом готовности АЦП. Если данные в АЦП не готовы, то высоким уровнем на входе логического элемента И триггер готовности устанавливается в нулевое состоянии. При этом на входе RDY БИС КР1810ГФ84 присутствует низкий уровень напряжения (устройство не готово), а выходы данных АЦП по прежнему находятся в третьем состоянии. Если же данные в АЦП готовы, то низким уровнем на входе логического элемента И триггер готовности устанавливается в единичное состояние. При этом на входе RDY БИС КР1810ГФ84 появляется высокий уровень напряжения (устройство готово), а на шину АЦП помещает данные.
В микросхеме КР1113ПВ1 младший значащий разряд (МЗР) соответствует напряжению:
![]() ( 2 )
( 2 )
При обработке данных использовать данное значение неудобно, поэтому для того чтобы довести это значение до величины 10мВ напряжение на вход АЦП подается через усилитель постоянного тока с коэффициентом передачи равным:
![]() ( 3 )
( 3 )
Точное значение коэффициента передачи устанавливается при помощи построечного резистора R15 в цепи обратной связи.
Коэффициент передачи инвертирующего операционного устройства определяется следующим образом:
![]() ( 4 )
( 4 )
Из формулы ( 4 ) видно, что изменения коэффициента передачи может быть осуществлено изменением сопротивления в цепи обратной связи. Его, легко изменять параллельным подключением различного числа резисторов в цепи обратной связи.
Подключение и отключение резисторов осуществляется, ключами DD2.1- DD2.3. Управление состоянием ключа (открыт, закрыт), осуществляется уровнем напряжения на выходе регистра DD1. При высоком уровне напряжения на одном из выходов регистра отпирается ключ, подключенный к этому выводу. Данные в регистр заносятся микропроцессором, командой вывода в порт по адресу 01h. Таким образом, значения коэффициента передачи будет определятся выражением:
![]() ( 5 )
( 5 )
Так как в разрабатываемом вольтметре необходимы следующие значения коэффициента передачи 1, то принимая значения R0 = 90 кОм по формуле (5) получим следующие значения номиналов резисторов:
R1 = 1 МОм.
Информация об измеряемой частоте (значение) отображается на четырех индикаторах (HG1, HG2, HG3 и HG4). Для хранения отображаемых данных до поступления новых используются два регистра КР1533ИР27 (DD17 и DD18). Процесс записи данных в регистры КР1533ИР27 стробируется сигналами M/IO и WR, подаваемые на входы PE и C. В разряды с нулевого по двенадцатый регистров DD17 и DD18 в двоично-десятичном коде микропроцессором записывается значение измеренного напряжения. Эти данные с выходов регистров поступают на дешифраторы двоично-десятичного кода в семисегментный.
Индикаторы HG1 - HG4 подключаются к выводам микросхем через ограничительные резисторы. Номинал резисторов рассчитываются из выражения:
![]() ( 6 )
( 6 )
где Ucc – напряжения источника питания;
Uпр – напряжение на светодиоде матричного индикатора;
U0вых – напряжение логического нуля на выходе ИМС;
I – ток протекающий через светодиод матричного индикатора.
3.2 Описание работы тахометра
После включения питания микропроцессор считывает поступающие импульсы, устанавливая на выходах логические уровни. В регистр DD1 записывается соответствующее значение. И на вход АЦП поступает некоторое количество импульсов. После окончания преобразования импульсов в код, данные из АЦП по шине данных поступают в микропроцессор, где они преобразуются из двоичного кода в двоично-десятичный. Полученный код МП записывает в регистры DD17 и DD18.
Значение измеренной частоты после преобразование в семисегментный код дешифраторами DD20 - DD22 отображается на индикаторах HG1-HG4.
4. Проектирования программного обеспечения
4.1 Разработка схемы алгоритма работы системы и программы
С точки зрения программиста разработанный цифровой тахометр, который состоит из программно доступных регистров микропроцессора и двух портов: порт АЦП и порт индикатора. И вся работа системы заключается в вводе данных из АЦП и их обработка (перевод в двоично-десятичный код), и выводе данных на индикатор.
Прежде чем приступить к разработке программы выполняющей перечисленные действия необходимо определить форматы данных вводимых и выводимых в порты.
Похожие работы
... кОм. Резистори R8 та R10 служать для узгодження вхідних опорів попереднього пристрою з послідуючим. Обираємо С2-23 - 100 кОм. 5 Розробка алгоритму роботи комп’ютеризованої вимірювальної системи вимірювання залежності кутової швидкості від часу Розробку алгоритмічного та програмного забезпечення при вирішенні подібного типу задач вже можна починати при завершенні розробки фунціональних схем ...
... , КФ1158ЕНхх с малым падением напряжения вход - выход охватывает диапазон выходных напряжений от 3 до 15В. Все стабилизаторы предназначены для широкой области применения и идеально подходят для нужд автомобильной электроники, так как имеют встроенную защиту от выбросов входного напряжения при сбросе нагрузки генератора до 60 В, защиту при подключении входного напряжения в обратной полярности и от ...
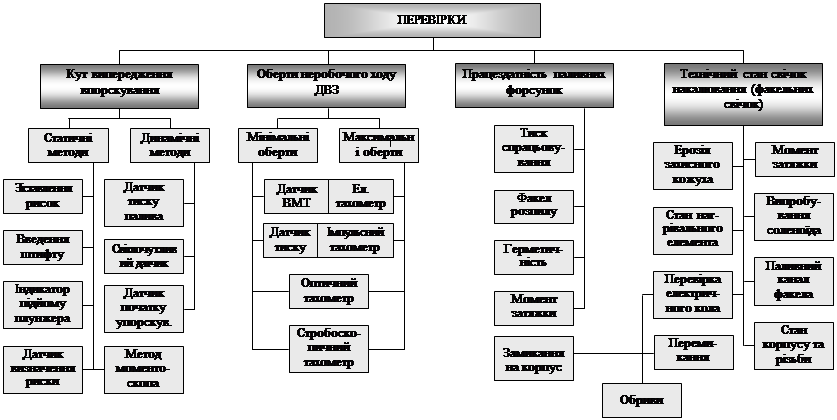
... в момент спалаху палива у циліндрі. Третій спосіб передбачає наявність датчика початку впорскування в конструкції ПНВТ та підключенні до нього спеціального електричного блоку. Рис.1. Методи та засоби первинних перевірок режимів та елементів паливної системи дизельного двигуна Максимальні та мінімальні оберти неробочого ходу дизельного двигуна встановлюють за допомогою регулювальних ...
... . Применять меры, обеспечивающие снижение колебания напряжения в электросети 4 При горячей обкатке при полном заглублении электродов реостата в раствор электромашина не развивает тормозной мощности Мала концентрация соды в растворе Увеличить количество соды в растворе до 2-З% Низкая температура Проверить исправность работы регулятора температуры Большой налет соды на электродах ...
0 комментариев