Навигация
Микропроцессорные системы: система ДЦ-МПК, система "Юг"
24560
знаков
0
таблиц
5
изображений
МИКРОПРОЦЕССОРНЫЕ СИСТЕМЫ:
СИСТЕМА ДЦ-МПК, СИСТЕМА «ЮГ»
1. Система «Юг» с распределенными контролируемыми пунктами
Первый вариант системы «Юг» принят в постоянную эксплуатацию на участках Батайск — Староминская — Тимашевская Северо-Кавказской железной дороги. В РГУ ПС разработаны программно-аппаратные решения на основе современной технической базы. Полностью выполнены требования ОСТ 32.111-98 и ОСТ 32.112—98, нормирующих параметры современных систем ДЦ.
Комплекс ДЦ-Юг с распределенными контролируемыми пунктами (РКП) введен в эксплуатацию на участке Краснодар — Тихорецкая Северо-Кавказской железной дороги.
Использован практический опыт внедрения линейных пунктов управления (ЛПУ) на 60 станциях в увязке с ЭЦ-4, ЭЦ-9, МРЦ-12, МРЦ-13. Выполнен переход на новые технические средства центрального поста управления (ЦПУ) на базе IBM PC индустриального исполнения и жидкокристаллических мониторов, расширен состав отображаемых данных (результаты диагностирования технических средств, сигналы от перегретых букс — аппаратура ПОНАБ, состояние переездов и др.), сформирована база приказов ДНЦ и ТРА станций, инструкций ДНЦ, подготовлены программные средства взаимодействия с АСОУП. Центральный пункт управления функционирует в операционной системе реального времени QNX с использованием технологии INTRANET, файлов HTML, реляционных баз данных формата SQL.
Информационные функции системы:
телемеханический контроль состояния технологических объектов (рельсовых цепей, стрелок, сигналов, переездов, устройств обнаружения перегретых букс и т.д.);
контроль состояния устанавливаемых и установленных маршрутов;
диагностирование собственных средств ДЦ;
контроль исправности устройств СЦБ;
ведение динамической поездной модели, контроль поездного положения на участке, подвижных единиц на участке с учетом номеров и индексов поездов;
регистрация, отображение, при необходимости, печать графика исполненного движения с приложениями;
ведение баз данных по поездам и обеспечение простого доступа к ним;
регистрация «окон», предупреждений и приказов диспетчера;
связь с АСОУП и информационными системами верхнего уровня ДАДЦУ (Дорожный автоматизированный диспетчерский центр управления);
протоколирование работы системы.
Управляющие функции системы:
установка, отмена поездных и маневровых маршрутов;
индивидуальное управление стрелками и сигналами;
перевод станций на резервное, сезонное, диспетчерское управление, групп стрелок на местное управление;
исключение (отмена исключения) перевода стрелок;
искусственная разделка стрелочных секций после полного замыкания маршрута;
управление средствами акустической и радиосвязи (включение/ выключение радио- и громкоговорящей связи, вызов к телефону, акустический вызов и т.д.);
управление режимами работы сигналов «День»/ «Ночь»;
накопление команд по заданию маршрутов в основном режиме функционирования с реализацией логики маршрутного набора и блокированием некорректных команд.
В состав аппаратуры центрального пункта управления (ПУ) входят IBM-совместные промышленные компьютеры, имеющие следующие технические характеристики:
Процессор.......................................... …………..Pentium II
Тактовая частота, МГц, не менее……………..………..233
Объем оперативной памяти, Мбайт, не менее………..32
Емкость жесткого диска, G байт, не менее……..……..1
Видеоадаптер……………………………………….…..S3
Сетевой адаптер……………………...Ethernet-10 Base T
В состав аппаратных средств ПУ входят также 21- и 14-дюймовые мониторы, модемы, лазерные и цветные струйные принтеры, сервер.
Круглосуточный режим работы аппаратных средств ПУ обеспечивается источниками бесперебойного питания, а также системой резервирования энергоснабжения, используемой на железнодорожном транспорте.
Состав и структура технических средств ДЦ-ЮГ приведены на рис. 1.
Условные обозначения элементов структурной схемы следующие:
АРМ ДНЦ — автоматизированное рабочее место поездного диспетчера; ФК — функциональная клавиатура, обеспечивающая ввод и формирование команд телеуправления при взаимодействии центрального пункта управления с контролируемыми пунктами (КП); РЛС — расширитель локальной сети, позволяющий подключить к локальной сети несколько пользователей; М-М — модем — устройство приема передачи данных по линиям связи (О — основной, Р — резервный); АРМ ШН — автоматизированное рабочее место электромеханика ДЦ, выполняющее функции организации связи ПУ с КП по основному и резервному каналам, контроль и диагностирование аппаратуры ДЦ; РКП-ТУ, РКП-ТС — блоки телеуправления и телесигнализации, обеспечивающие сопряжение аппаратуры ДЦ на КП с устройствами ЭЦ; РКП-Ц — центральный блок управления контролируемыми пунктами, обеспечивающий взаимодействие КП с ПУ, с соседними КП, а так же блоками РКП-ТУ и РКП-ТС; ЛС — локальная сеть.
Агрегатный принцип построения системы на базе РКП обеспечивает высокую унификацию, технологичность в серийном производстве, простоту изменения объема выполняемых функций и конфигураций.
Функциональная и структурная децентрализация системы на основе локальной сетевой архитектуры РКП обеспечивает ее высокую надежность.
Применение блоков РКП-ТУ и РКП-ТС, которые монтируются на базе реле НМШ и устанавливаются на релейном стативе в розетке реле НМШ, способствует сокращению релейного оборудования (стативов, реле, релейных блоков и т.д.), а также объема монтажных работ и внутрипостового кабеля.
Блоки РКП-ТУ предназначены для включения управляющих реле по командам телеуправления поездного диспетчера. Один блок РКП-ТУ позволяет включать до восьми управляющих реле.
Блоки РКП-ТС служат для ввода контролируемых сигналов.
Один блок позволяет обработать до 20 сигналов ТС. Число блоков определяется количеством сигналов.
Резервированные блоки РКП-Центр предназначены для ввода, обработки всех сигналов, поступивших с блоков РКП-ТУ, РКП-ТС и передачи данных на ПУ. Блок РКП-Центр разработан в виде настенного шкафа с набором электронных плат, устанавливается в релейном помещении, один на промежуточной станции.
Система характеризуется следующими общими техническими показателями:
Способ функционирования программный
Тип используемых в РПК микропроцессоров - 80С196, PIC6C63
Хранение рабочих программ - ПЗУ
Операционная система реального времени - QNX
Структура линий связи - радиальная, многоточечная, кольцевая
Число РКП на кольцо связи, не более 15
Число двухпозиционных объектов на РКП:
управления, не более 1008
контроля, не более 2520
Способы опроса объектов контроля - циклический, спорадический, смешанный
Время, с:
цикла опроса объектов контроля, не более 5
передачи одной команды, не более 0.5
отображения поездной ситуации, не более 5
ответа на запрос диспетчера, не более 5
Модуляция каналов ТУ, ТС - частотная
Скорость передачи по каналам ТУ, ТС, Бод, не менее 1200
Характеристика частоты каналов ТУ, ТС, Гц, для сигнала:
логическая 1….1300 ± 10
логический 0….2100 ± 10
Номинальное значение входного и выходного сопротивлений
модема, Ом… 600
Уровень мощности сигнала, дБ:
на выходе передатчика….-28...0
на входе приемника -40…0
Напряжение, обеспечиваемое выходными элементами телеуправления РПК, В, при сопротивлении нагрузки:
Похожие работы
... ЗИП должно обеспечиваться его исправное состояние в течение гарантированного срока и возможность немедленного использования. Несанкционированный доступ к информации исключается особенностями построения программного обеспечения и существующими организационными мерами, не допускающими нахождения посторонних в АДЦУ. По желанию заказчика несанкционированный доступ к системе может исключаться вводом ...
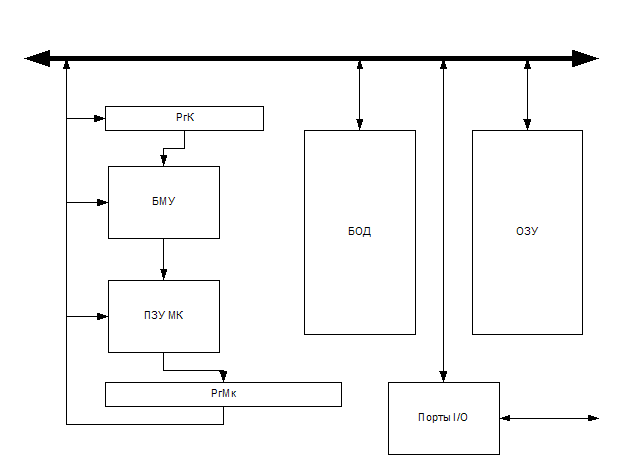
... регистра вправо) shl Reg (сдвиг регистра влево) and Reg, операнд and Reg (Reg с аккумулятором) or Reg (аккумулятор с Reg) xor Reg (аккумулятор с Reg) 1.2 Разработка обобщённой структуры микро ЭВМ на основе алгоритмов решения задач. С учётом вышеизложенных алгоритмов обобщённую структуру микро ЭВМ можно представить следующим образом (рис. 3.). Рис. 3. Обобщённая структура микро ЭВМ. ...
... характер сигналов интерфейса и их временную диаграмму, а также описание электрофизических параметров сигналов. На рис. 2.2 представлена общая схема сопряжения МП с устройствами ввода-вывода УВВ и ОЗУ в микропроцессорной системе. Рис 2.2. Схема интерфейсных связей микропроцессора Связь МП с УВВ требует пять групп связей, обеспечиваемых через выводы корпуса МП. По группе шин 1 передается ...
... автоматическое управление электроприводом и электрическими аппаратами серийного электровоза ЭП1 в режимах тяги и торможения. При этом аппаратура МСУД обеспечивает: разгон электровоза до заданной скорости с заданной и автоматически поддерживаемой величиной тока якоря тяговых электродвигателей и последующее автоматическое поддержание заданной скорости, рекуперативное торможение до заданной скорости ...
0 комментариев