Навигация
Умови оптимальності у задачі з рухомими кінцями
11483
знака
0
таблиц
2
изображения
4. Умови оптимальності у задачі з рухомими кінцями
У задачі з рухомими кінцями або початковий стан ![]() , або кінцевий стан
, або кінцевий стан ![]() , або обидва ці стани невідомі. Задані тільки множини
, або обидва ці стани невідомі. Задані тільки множини ![]() і
і ![]() , що містять точки
, що містять точки ![]() та
та ![]() .
.
Гіперповерхня – це множина всіх точок ![]() , які задовольняють співвідношенню
, які задовольняють співвідношенню
![]() ,
,
де ![]() – скалярна диференційована функція. Якщо
– скалярна диференційована функція. Якщо ![]() – лінійна функція, то гіперповерхня називається гіперплощиною і описується рівнянням
– лінійна функція, то гіперповерхня називається гіперплощиною і описується рівнянням
![]() . (19)
. (19)
Якщо ![]() , то гіперплощина (19) є (
, то гіперплощина (19) є (![]() )-вимірним лінійним підпростором в
)-вимірним лінійним підпростором в ![]() .
.
Будь-який (![]() )-вимірний підпростір
)-вимірний підпростір ![]() може бути заданий як множина розв’язань лінійної однорідної системи з
може бути заданий як множина розв’язань лінійної однорідної системи з ![]() рівнянь із
рівнянь із ![]() невідомими, матриця якої має ранг
невідомими, матриця якої має ранг ![]() :
:
![]() .
.
Такий лінійний підпростір називається ![]() -вимірною площиною. Множина розв’язань системи нелінійних рівнянь
-вимірною площиною. Множина розв’язань системи нелінійних рівнянь
де функції ![]() , …,
, …, ![]() диференційовані і ранг матриці Якобі цієї системи функцій дорівнює
диференційовані і ранг матриці Якобі цієї системи функцій дорівнює ![]() , є
, є ![]() -вимірним гладким різноманіттям.
-вимірним гладким різноманіттям.
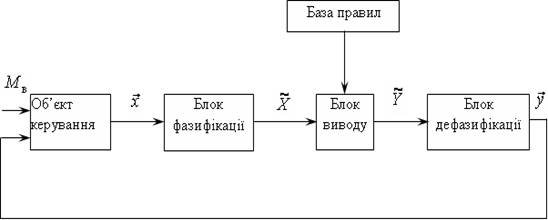
Задача оптимального керування з рухомими кінцями полягає в тому, щоб знайти таке припустиме керування ![]() для системи із законом руху
для системи із законом руху
![]() ,
, ![]() ,
, ![]() ,
,
яке переводить фазову точку з деякого, заздалегідь невідомого, стану ![]() на
на ![]() -вимірному різноманітті
-вимірному різноманітті ![]() (
(![]() ) у деякий стан
) у деякий стан ![]() на
на ![]() -вимірному різноманітті
-вимірному різноманітті ![]() (
(![]() ) і надає найменшого значення функціоналу
) і надає найменшого значення функціоналу
 .
.
Задача оптимального керування з фіксованими кінцями є окремим випадком цієї задачі при ![]() , тобто коли різноманіття
, тобто коли різноманіття ![]() і
і ![]() вироджуються в точку.
вироджуються в точку.
Відсутність рівнянь, що задають початковий і кінцевий стани, приводить до того, що система необхідних умов перестає бути повною. У цьому разі для одержання відсутніх рівнянь використовують умови, що називаються умовами трансверсальності.
Умови трансверсальності. Вектор спряжених змінних ![]() із принципу максимуму задовольняє умові трансверсальності на лівому кінці траєкторії
із принципу максимуму задовольняє умові трансверсальності на лівому кінці траєкторії ![]() , якщо вектор
, якщо вектор ![]() ортогональний дотичній площини до різноманіття
ортогональний дотичній площини до різноманіття ![]() в точці
в точці ![]() , тобто
, тобто
![]() , (20)
, (20)
де ![]() – довільний вектор, що лежить у дотичній площини. Аналогічно формулюється умова на правому кінці.
– довільний вектор, що лежить у дотичній площини. Аналогічно формулюється умова на правому кінці.
Якщо ![]() ,
, ![]() – оптимальний процес у задачі з рухомими кінцями
– оптимальний процес у задачі з рухомими кінцями ![]() ,
, ![]() , то ненульова вектор-функція
, то ненульова вектор-функція ![]() , що існує відповідно до теореми 3, задовольняє на кожному з кінців траєкторії умовам трансверсальності.
, що існує відповідно до теореми 3, задовольняє на кожному з кінців траєкторії умовам трансверсальності.
Розглянемо окремий випадок задачі з рухомими кінцями, коли, наприклад, правий кінець траєкторії вільний (тобто ![]() ). Тоді умови трансверсальності зводяться до співвідношення
). Тоді умови трансверсальності зводяться до співвідношення ![]() . Повний вектор спряжених змінних
. Повний вектор спряжених змінних
![]()
визначається з точністю до довільної сталої, зокрема, вважають, що ![]() (відповідно до принципу максимуму
(відповідно до принципу максимуму ![]() ,
, ![]() ) і тоді
) і тоді
![]() .
.
Похожие работы
... ідно вдосконалювати матеріальне й соціальне стимулювання працівників. Одним з напрямків удосконалювання системи стимулювання праці у АТ «Цукровий комбінат» є реалізація вартісної концепції оплати праці на рівні підприємства припускає зміну системи внутріфірмового керування й стимулювання на основі розвитку внутрівиробничих товарно-грошових відносин між структурними одиницями підприємства аж до ...
... випадків, аварій, а з цим і простоїв на підприємстві, укріпити та створити культуру трудової діяльності. Виконання та розробка дипломного проекту “ Розробка дослідження системи керування електроприводом змінного струму дизель-потягу з використанням нейронних мереж ” відбувається за допомогою комп'ютера, тому питання охорони праці розглядаються щодо забезпечення здорових і безпечних умов роботи ...
Автоматизована система керування потоками потужності у складнозамкнених електроенергетичних системах
... і Рисунок 6.2 – Графік залежності зони нечутливості від зниження втрат7. Оптимальне керування режимом ЕС в темпі процесу Керування потоками потужності в ЕС виконується за допомогою трансформаторів з РПН. Інформація про стан системи, що включає параметри режиму та регулюючих пристроїв отримується з бази даних оперативного інформаційно-керуючого комплексу (ОІКК). На основі поточної інформац ...

... в даній роботі, була опробована й досліджена в реальних умовах моєї професійної діяльності й показала свою працездатність і ефективність. 3. Розробка системи керування та актуалізації інформації web-сайту національного оператора Енергоринка 3.1 Вибір інструментарію для створення web-сайту та системи керування Перед тим, як безпосередньо перейти до створення Web-сайту Національного ...
0 комментариев