Обладнання 1-го контуру
Обладнання 2-го контуру
Призначення, склад, технічні характеристики системи автоматичного регулювання
Робота гідравлічної частини системи регулювання
Склад ЕЧСР
Органи керування ЕЧСР
Виконавчі органи ЕЧСР
Датчики вхідних параметрів ЕЧСР
Короткий опис основної апаратури ЕЧСР
Необхідно записати новий кристал пам'яті. Для цього набирається початкова адреса масиву програмування в пам'яті ЕОМ;
Органи відображення стану ЕЧСР
Робота ЕЧСР в різних режимах роботи енергоблоку
Робота швидкодіючого контуру керування турбіною
Розробка програмного субмодуля контролю струму ЕГП
Охорона праці
Біологічний захист
Системи локалізації аварій
Електробезпека
Розрахунок захисного заземлення
Технічні рішення системи запобігання пожеж
Навигация
Робота швидкодіючого контуру керування турбіною
Система автоматичного регулювання (САР) турбіни атомної електростанції
199387
знаков
21
таблица
11
изображений
3.1 Робота швидкодіючого контуру керування турбіною
В даному каналі керування формується вплив на ЕГП з метою забезпечення протирозгінного захисту турбіни, підвищення її приємистості, та роботи енергоблоку в аварійних і післяаварійних режимах роботи енергосистеми.
Керування ЕГП здійснюється через вихідний аналоговий підсилювач потужності ЕЧСР, на вхід якого подається сума впливів, сформованих по наступним функціональним каналам:
Ø релейної форсировки (РФ);
Ø диференціатора (ДИФ);
Ø корекції початкової нерівномірності (ПКН);
Ø швидкодіючого післяаварійного керування потужністю (ПАУ);
Ø попереднього захисту (ПЗ);
Ø імпульсного розвантаження в аварійних режимах роботи енергоблоку (АІР).
Крім того можна виділити канал вимірювання потужності генератора і канал всережимного вимірювання частоти обертання валу турбіни з видачею аналогового і ряду дискретних сигналів.
Канал релейної форсировки (РФ) призначений для подачі в систему регулювання сигналу, що форсує, на закриття регулювальних клапанів при відключенні генератора від мережі. Подача імпульсу виробляється від блок-контактів вимикачів генератора і від релейного захисту, що діє на відключення вимикачів генератора.
Канал диференціатора (ДИФ) призначений для подачі сигналу, що закриває регулюючі клапана турбіни з появою позитивного кутового прискорення ротора, яке свідчить про велике миттєве скидання навантаження генератора.
Диференціатор включається в роботу при підвищенні частоти обертання вище 103% wном і наявності прискорення обертання ротора турбіни. Диференціатор забезпечує протирозгынний захист турбіни видачею на ЕГП керуючого сигналу, пропорційного прискоренню ротора турбіни:Iдиф. = K (dw/dt – Уст dw/dt),
де dw/dt – прискорення ротора турбіни;
Уст dw/dt – уставка спрацьовування;
К – коефіцієнт підсилення.
Датчиком служить електричний датчик частоти обертання ротора. Сигнал датчика перетвориться в диференціаторі і функціональному перетворювачі. Наявна можливість зміни коефіцієнта підсилення по прискоренню ротора (крутості характеристики) і величини прискорення, при якій диференціатор вступає в роботу.
Канал корекції початкової нерівномірності (ПКН) призначений для поліпшення приємистості турбіни з метою компенсації шкідливого впливу на приємистість великої кількості пари, акумульованої в промперегріві.
Вихідний сигнал каналу ПКН утворюється різницею сигналів від датчика електричної потужності і датчика тиску пари в промперегріві.
Знаки сигналів від датчиків обрані таким чином, щоб збільшення потужності приводило до відкриття регулювальних клапанів свіжої пари, а збільшення тиску приводило до закриття цих клапанів.
При зміні споживання потужності в енергосистемі регулювання турбіною здійснює перестановку регулювальних клапанів в положення, при якому потужність турбіни відповідає новій споживаній потужності.
Однак потужність турбіни при зміні частоти буде швидко мінятися на величину потужності ЦВТ, а потужність ЦНТ через наявність великого об’єму промперегріву буде мінятися повільно в міру зміни тиску в промперегріві, тобто початкова нерівномірність регулювання (нерівномірність, коли тиск у промперегріві можна вважати практично постійним) буде велика. Для зменшення початкової нерівномірності при зміні потужності генератора в каналі ПКН виробляється сигнал вбік привідкриття чи призакриття регулювальних клапанів ЦВТ таким чином, щоб зміною потужності ЦВТ короткочасно компенсувати відставання в зміні потужності ЦНТ. З наступною зміною тиску в промперегріві (що свідчить про зміну потужності, яка виробляється в ЦНТ), сигнал каналу ПКН буде зменшуватися й у статиці дорівнюватиме нулю.
При навантаженнях нижче 40% кожен вхід каналу ПКН (потужність і тиск) має постійне значення, рівне значенню відповідного датчика при навантаженні 40%, тому вхідний сигнал коректора при навантаженнях нижче 40% дорівнює нулю незалежно від співвідношення між навантаженням і тиском промперегріву.
Вихідний сигнал ПКН вбік закриття клапанів обмежений величиною, що допускає зміну положення клапанів лише на 20–30%. Це виконується з метою зменшення зміни середньої потужності турбіни при великих аварійних хитаннях в енергосистемі. Обмеження знімається при відключенні генератора від мережі (контакти ВГ), при підвищенні частоти обертання вище 103% і по сигналам пристроїв протиаварійної автоматики енергосистеми.
Канал швидкодіючого управління потужністю в післяаварійних режимах (ПАУ) призначений для обмеження потужності турбіни до заданої величини в післяаварійних режимах роботи лінії електропередач чи до рівня технологічних обмежень і включається по сигналах станційних пристроїв протиаварійної автоматики (ПА) або технологічної автоматики блоку (ТА).
ПАУ1 – 70% Nном.
ПАУ2 – 60% Nном.
ПАУ3 – 50% Nном.
ПАУ видає спрямований на переміщення клапанів турбіни багаторазово посилений сигнал перевищення поточної потужності турбіни над величиною заданої потужності, виробленої в залежності від типу аварії пристроями ПА чи ТА. В каналі присутній динамічний контур для поліпшення стійкості регулювання.
Канал попереднього захисту (ПЗ) функціонально є частиною системи захисту турбіни від розгону.
По каналу ПЗ в систему регулювання і захисту подається сигнал, який форсує, на закриття стопорних і регулювальних клапанів турбіни у випадку, якщо за якимись причинами при скиданні навантаження частота обертання перевищить заданий рівень, що залежить від поточного значення першої похідної частоти обертання.
Уставка спрацьовування ПЗ формується відповідно до закону:wср. = wср.о. – K dw/ dt,
де wср.о.= 113% wном – уставка спрацьовування ПЗ по частоті обертання без врахування прискорення;
dw/ dt – прискорення ротора турбіни;
К – коефіцієнт підсилення.
Чим вище перша похідна, тим нижче заданий рівень спрацювання ПЗ по частоті обертання. Якщо при скиданні навантаження система регулювання функціонує правильно, то під час перехідного процесу поточна частота обертання завжди виявиться нижче заданої і спрацювання попереднього захисту не відбудеться. При відмовленні системи регулювання і скиданні навантаження поточне значення першої похідної буде високим у всьому діапазоні підвищених частот обертання, що викликає спрацювання ПЗ. У цьому випадку канал ПЗ подасть сигнал на електромагнітний вимикач попереднього захисту, при спрацюванні якого закриваються всі регулюючі і стопорні клапани турбіни, а при зникненні сигналу ПЗ забезпечується послідовне відкриття спочатку стопорних, а потім регулювальних клапанів. Завдяки попередньому захисту у випадку скидання навантаження з відключенням генератора від мережі і відмовленні системи регулювання запобігається підвищення частоти обертання понад 120%.
При роботі попереднього захисту сигнал про закриття стопорних клапанів турбіни видається з витримкою часу 5 с, достатньої для відкриття стопорних клапанів при нормальній роботі системи регулювання після спрацювання попереднього захисту.
Канал аварійного імпульсного розвантаження (АІР) забезпечує можливість швидкого зниження потужності турбіни з наступним її відновленням до вихідного рівня.
Імпульсне аварійне розвантаження турбіни здійснюється по одній із трьох команд загальстанційної системи протиаварійної автоматики від яких залежить глибина розвантаження:
АІР1 – 50% Nн;
АІР2 – 30% Nн;
АІР3 – 0% Nн;
Керування РК турбіни здійснюється подачею на ЕГП керуючого токового імпульсу за формою аналогічного РФ (див. Рис. 2.3).
Тривалість прямокутної частини імпульсу (Т), амплітуди (А и А0) і тривалість загасаючої частини імпульсу (Т0) повинні задаватися окремо для АІР1, АІР2, АІР3.
Ініціативні команди від ПА надходять в ЕЧСР імпульсами тривалістю не менше 100 мс. При надходженні одночасно декількох команд АІР, ЕЧСР повинна відпрацьовувати команду на більш глибоке розвантаження.
Загальна швидкодія системи регулювання турбіни, з урахуванням дії ЕЧСР забезпечує максимальне підвищення швидкості обертання після миттєвого скидання навантаження генератора – не більше 107% від номінальної частоти обертання.
Робота повільнодіючого контуру керування турбіною.
Регулятор потужності і тиску (РПТ) забезпечує можливість керування турбіною шляхом впливу на двигун МКТ. Відповідно до положення розміщеного на БЩУ перемикача вибору режимів (ПР) чи відповідно до команд автоматичних пристроїв забезпечуються наступні режими роботи РПТ і керування двигуном МКТ:
Ø режим дистанційного керування МКТ (А1);
Ø режим регулювання частоти обертання, положення регулювальних клапанів і потужності турбіни при пуску (А2);
Ø режим регулювання потужності (А3);
Ø режим регулювання тиску свіжої пари (А4).
Відповідно до регульованого параметра можна виділити наступні функціональні контури регулювання в блоці РПТ:
Ø контур регулювання потужності;
Ø контур регулювання тиску (КРТ);
Ø контур регулювання частоти обертання (КРЧО).
Елементи живлення і дистанційного керування двигуном входять до складу ЕЧСР.
У режимах регулювання А2…А4 керування двигуном МКТ здійснюється через широтно-імпульсний перетворювач і підсилювач потужності. При цьому реалізується Пі-закон регулювання з автоматичною зміною параметрів настроювання, здійснюваним в залежності від того, в який з контурів регулювання (тиску, частоти обертання чи потужності) знаходиться в роботі. В закон формування керуючого впливу на МКТ введені блокування на «додати» і «зменшити», що діють при наявності на енергоблоці технологічних обмежень.
Вхідними сигналами РПТ є:
Ø сигнал, пропорційний електричній потужності генератора (від вимірювача потужності ЕЧСР);
Ø сигнал задання потужності, що надходить з обмежувача темпу задання (ОТЗ);
Ø сигнали, пропорційні частоті обертання турбіни і її відхиленню від номінального значення;
Ø сигнали від автомата пуску турбіни;
Ø сигнал, пропорційний тиску свіжої пари;
Ø сигнал, пропорційний керуючому тиску в гідравлічній частині системи регулювання.
При режимі А1 дистанційного керування двигуном МКТ контури регулювання РМД відключаються.
У режимі керування А2 РПТ використовується як додатковий орган автомата пуску. Відпрацювування команд автомата пуску здійснюється за допомогою інтегруючих входів, один з яких змінює задане значення частоти обертання турбіни відносно «грубо» у широкому діапазоні частот, розташованому близько 3000 об/хв. Переключення з одного входу на іншій здійснюється автоматично після досягнення частоти обертання 3000 об/хв.
Присутній також третій інтегруючий вхід, який використовується для самобалансування РМД при його відключенні від МКТ з метою наступного підключення без «поштовху» потужності на турбіні. З цією же метою додатково передбачається:
– витримка часу (0,3 – 0,5 с) при подачі сигналу на включення РПТ;
– дозвіл на включення РПТ тільки у випадку відсутності його вихідного сигналу протягом 5 – 7 с.
Після включення РПТ у роботу забезпечується зникнення з заданою швидкістю сигналу самобалансування.
В режимі А3 регулювання потужності забезпечується стабілізація потужності турбоагрегату на рівні, заданому оператором, і автоматичний перехід з одного рівня потужності на іншій у темпі, що допускається обмежником темпу задання. Регулювання потужності здійснюється в залежності від величини розбалансу фактичної і заданої потужності. При цьому також використовуються наступні коректуючі впливи:
Ø коректуючий вплив по частоті обертання – забезпечує можливість регулювання потужності у відповідності із статичною характеристикою регулювання «потужність – частота обертання», причому передбачена можливість зміни нерівномірності регулювання від 2,5 до 6% ступінями по 0,5%;
Ø коректуючі впливи по тиску свіжої пари і положенню регулювальних клапанів турбіни – забезпечують можливість поліпшення динамічних характеристик регулювання парогенератора;
коректуючий вплив з виходу каналу ПАУ швидкодіючої частини ЕЧСР – дозволяє прискорити відпрацювання заданого значення потужності повільнодіючим контуром і поліпшити перехідний процес встановлення заданої потужності.
В положенні перемикача режимів А4 забезпечується обмеження тиску свіжої пари на рівні не нижче його мінімально припустимого значення, з можливістю переключення на режим регулювання номінального тиску свіжої пари (регулювання «до себе») при відключенні регулятора парогенератора чи виникненні технологічних обмежень. Контури регулювання частоти і потужності при цьому відключаються.
При регулюванні частоти і потужності в режимах А2 і А3 контур регулювання тиску працює в режимі «очікування», запобігаючи зниженню тиску нижче заданого значення. Це забезпечується за допомогою автоматичної зміни уставки завдання регулятору тиску і за допомогою елемента виділення мінімуму.
Обмежувач темпу завдання забезпечує обмеження темпу завдання зміни навантаження енергоблоку в режимі автоматичного регулювання А3 у регулювальному діапазоні навантажень.
При цьому зміни потужності обмежуються як по величині, так і по швидкості. Введення обмежень по величині зв'язано, в основному, з вичерпанням регулювального діапазону енергоблоку (чи наявністю обмежень по положенню регулювальних клапанів), а також виникненням технологічних обмежень на енергоблоці. Обмеження по швидкості зміни потужності на режимах нормального регулювання може вводитися вручну за допомогою встановленого на БЩУ задавача. Обмеження по швидкості зміни вводяться також автоматично в залежності від поточного термонапруженого стану турбіни. Крім того, передбачається прийом сигналів від зовнішніх пристроїв, що встановлюють, зокрема, кінцевий рівень завдання потужності, заданий темп зміни потужності, верхнє і нижнє значення регулювального діапазону енергоблоку, а також сигналів від АРЧМ і загальстанційної ЕОМ, що відповідають неплановій та економічній складовим завдання потужності.
ОТЗ містить у собі канал формування завдання і канал відпрацьювання й обмеження завдання потужності.
Канал формування завдання здійснює перетворення і виділення сигналу завдання з вводом в ЕЧСР по роздільних входах сигналів від наступних зовнішніх пристроїв:
Ø загальноблочних давачів, що визначають рівень кінцевого значення потужності і темп зміни потужності;
Ø регулюючих пристроїв АРЧМ;
Ø загальностанційної ЕОМ, оснащеної засобами рішення задачі економічного розподілу навантажень між енергоблоками;
Ø пристроїв протиаварійної автоматики;
Ø автомата пуску турбіни;
Ø регулятора навантаження парогенератора.
Для забезпечення нормальних режимів роботи турбоагрегату за графіком передбачена зміна завдання потужності в регулювальному діапазоні навантажень з визначеною, фіксованою швидкістю. Швидкість зміни завдання і рівень кінцевої потужності встановлюються оператором за допомогою зовнішніх давачів. Передбачене також блокування змін завдання у відповідну сторону при виникненні технологічних обмежень (у тому числі і по термічному стану турбіни), при вичерпанні регулювального діапазону, а також у післяаварійних режимах, зв'язаних зі спрацюванням каналу ПАУ, відхиленням частоти за задані межі.
Підключення ОТЗ для відпрацювування завдань від автомата пуску, пристроїв протиаварійної автоматики супроводжується відключенням основного контуру завдання потужності в нормальних режимах. При цьому найбільший пріоритет мають команди пристроїв протиаварійної автоматики, а потім автомата пуску. Наступне підключення основного контуру завдання потужності здійснюється «безударно», із плавним переходом до рівня, що передує відключенню.
Вихідний контур ОТЗ являє собою систему, що стежить, і забезпечує відпрацювання й обмеження вхідних сигналів. Відпрацьовування вхідного сигналу при відсутності обмежень здійснюється досить швидко (40с на нерівномірність). При виникненні обмежень відстеження припиняється аж до моменту усунення обмежень. Зокрема, якщо обмеження обумовлюються термонапруженим станом турбіни, то стала швидкість відпрацювання завдання буде відповідати підтримці цих обмежень на рівні гранично припустимих значень.
Вихідний сигнал ОТЗ вводиться як сигнал завдання в регулятор потужності і тиску ЕЧСР. Сумуючись із сигналом корекції по частоті, він виводиться також в аналоговому вигляді (5 мА постійного струму при навантаженні не більше 500 Ом) у зовнішні ланцюги як завдання енергоблоку (в РПГ).
Канал контролю прогріву турбіни (УКП) призначений для проведення вимірів режиму роботи турбіни в темпі, що допускається тепловим станом турбіни. При цьому в залежності від величини і знака цих сигналів виробляються команди, які або дозволяють зміну режиму роботи турбіни з граничною швидкістю МКТ, або обмежують швидкість зміни режиму.
При автоматичній зміні навантаження в регулювальному діапазоні обмеження вводяться за допомогою команд, що припиняють процес зміни завдання потужності з виходу ОТЗ. Припинення здійснюється при підвищенні показника σ, що побічно характеризує рівень термонапруженого стану ЦВТ турбіни, понад значення, що допускаються, відповідним режимом планового регулювання потужності (σпл±) і режимом непланового регулювання (σнпл±). Відповідні швидкості зміни завдання планової і непланової потужності складають 2%/хв і 3%/хв. При підвищенні понад значення, що допускаються, d±() різниці температур, що більш точно характеризує рівень термонапруженого стану ЦВТ, вводяться команди, що забороняють переміщення МКТ контуром регулювання потужності у відповідну сторону. Цим забезпечується облік обмежень по швидкості прогріву ЦВТ, що задаються звичайно інструкцією з експлуатації турбіни.
При дистанційному керуванні турбоустановкою ЕЧСР за допомогою зовнішніх засобів візуального контролю дозволяє оператору вести зміни потужності енергоблоку в темпі, обмеженому умовами прогріву турбіни. Для виконання цих функцій в складі вихідних пристроїв ЕЧСР передбачене виведення трьох аналогових уніфікованих сигналів на керуючу обчислювальну систему. Один із сигналів відповідає фактичній потужності (N), два інших – значенням потужності, що дозволяються, вбік збільшення і зменшення (N+ і N-). Відхилення фактичної потужності від значень, що дозволяються, визначають діапазон, що дозволяється, для швидких і безпечних змін потужності на даний момент часу.
4. Структура програмного забезпечення
Структура математичного програмного забезпечення обумовлена функціональним призначенням ЕЧСР і вимогами, які пред’являються до систем керування потужністю великих парових турбін у нормальних, аварійних і післяаварійних режимах.
Блок-схема математичного забезпечення приведена на мал. 4.1.
| ||||
| ||||
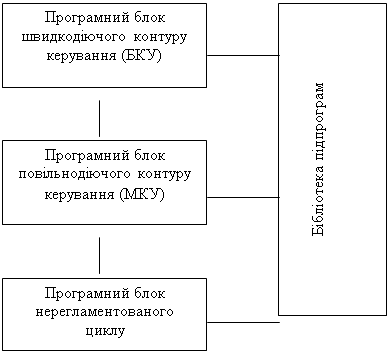 | ||||
Рис. 4.1 Блок-схема математичного забезпечення
Перший програмний блок складають програми початкового пуску: «ПУСК», «START». Програма «ПУСК» забезпечує вибір режиму роботи: «MONITOR» або системи ЕЧСР «START». Вибір здійснюється по положенню ключа I, розташованого на субблоці керування.
Програма формує вихідні дані в масивах ОЗУ (обнулення робочих областей ОЗУ, підготовка службової таблиці для контролерів переривань) і віддає керування одній з вище зазначених програм.
При роботі з програмою «MONITOR» через дисплей чи телетайп організується діалоговий режим «оператор-ЕОМ». «MONITOR» дозволяє реалізувати де-які функції «редактора при налагодженні програм, а також забезпечує можливість нагромадження інформації на магнітній стрічці побутового магнітофона.
При передачі керування програмі «START» здійснюється запуск системи програмного забезпечення ЕЧСР.
Для цього в програмі «START» проводиться програмне настроювання мікро-ЕОМ (установка режимів і ініціалізація контролерів, таймерів інтерфейсу усіх вузлів ЕОМ). Попередньо повинно бути здійснено оперативне настроювання всіх плат ЕОМ за наявною методикою.
Крім того, у програмі «START» проводиться тестування ОЗУ і вузлів ЕОМ. При виявленні несправності встановлюється режим «до оператора» з індикацією стану (відмовлення) на пульті ЕОМ.
При відсутності збоїв, керування віддається програмному блоку вимірювання періоду сигналу індукторного тахогенератора (ТГІ).
Програми блоку вимірювання періоду є програмами що мають вищий пріоритет стосовно всіх програм, крім програми, що фіксує порушення циклічності роботи «ТМР».
У субблоці перетворювача частоти (СПЧ) виробляються імпульси в момент переходу напруги ТГІ через «0». По передньому фронту цих імпульсів ініціюється вимога на переривання по 4-му рівні контролера і запускається програма «CLOCK2», що фіксує початок відліку часу Т.
По задньому фронту імпульсу СПЧ ініціюється вимога на переривання по 3-му рівню контролера, що обумовлює роботу програми «CLOCKIN» або «CLOCKIL». При пуску до синхронізації включена програма «CLOCKIL», після синхронізації – «CLOCKIH», що забезпечує, за рахунок використання таймерів з різною тактовою частотою, більш високу точність виміру часу Т. У програмах «CLOCKIL» і «CLOCKIH» виробляється «зчитування на лету» і запам'ятовування стану таймера. Далі програма «CHETII», обробляє величини (N1 і N2) двох наступних вимірів «CLOCKI», формує величину, пропорційну часу Т(N2-N1=k*T).
Програмний блок швидкодіючого контуру керування забезпечує формування впливів по швидкодіючих каналах керування потужністю турбоагрегату. Блок містить у собі програми вводу-виводу інформації, функціональні програми, програми контролю і діагностики.
Програма введення аналогових сигналів «INASP» забезпечує зчитування інформації з чотирьох каналів і узгодження масштабів прийнятого сигналу з установленою машинною величиною.
Програма введення дискретних сигналів «INSEC» обслуговує 16 каналів дискретної інформації.
Програма виводу аналогової інформації «OUTSP» формує керуючий вплив через підсилювач СВУ ЕГП на гідравлічну систему регулювання турбіни. При цьому здійснюється масштабне узгодження числового коду з параметрами керуючого сигналу.
Програми введення «INAN1M» і «INAN2M» забезпечують введення і масштабування сигналів від датчиків аналогової інформації, а також контрольних сигналів з виходу ЕЧСР.
Програма виводу аналогової інформації «OUTAN» здійснює масштабне узгодження і керування зовнішніми цифро-аналоговими перетворювачами (ЦАП).
Керування ведеться через порти рівнобіжного інтерфейсу плати ПСВ01.
Програма виводу дискретної інформації «DIOUT» через порти рівнобіжного інтерфейсу плати ПСВ01 і вихідні мультиплексори СР2 керує реле (СКР), що забезпечує формування дискретних команд.
Програма «FICMAC» аналогічно програмі «SICMAC» виробляє керуючі команди для алгоритмічної перебудови МКУ.
Програма «FORDIN», використовуючи інформаційні масиви програм: «SICMAC» і «FICMAC», а також масив IC, формує масив вихідних керуючих сигналів «DIN», що обробляється програмою «DIOUT».
Програми контролю забезпечують підвищення надійності функціонування ЕЧСР, здійснюючи тестування ЕОМ і супутнього УСО.
Контроль здійснюється з використанням програмно-апаратних засобів системи ЕЧСР.
В ЕОМ контролюється працездатність ОЗП плат ПМВ01, МВ01 шляхом запису, зчитування і порівняння визначених кодів.
Для перевірки плати ПСВ01 встановлюється визначений режим плати (множення) і контролюється результат. Названі операції проводяться програмою «TEST», що включається в програмний блок початкового пуску, і блок програм нерегламентованого циклу.
Крім того здійснюється контроль плат АВВ01 і ПСВ01 за максимальним часом виконання операцій. Для АВВ01 – це час зчитування інформації з одного каналу, для ПСВ01 час виконання операції множення чи ділення. Реалізується часовий контроль програмою (ТМР), що обслуговує таймер 5, який ініциалізує переривання по 3-му рівні контролера переривань при перевищенні встановленого часу виконання операцій, а також часу роботи програм БКУ і МКУ.
Програма ТМР сполучена з програмним файлом «TEST». При порушенні тимчасового циклу відбувається переключення на резервну ЕОМ, а несправна система переходить у режим діагностики «d». У цьому режимі функціонує тільки програма «USOCON», що забезпечує вивід інформації про тип відмовлення на індикатори пульта ЕОМ.
У системі задіяні також формовані в ЕОМ сигнали контролю по парності і помилці звертання.
Програма контролю вхідних аналогових сигналів забезпечує виявлення несправного каналу і перехід на зчитування інформації зі справного каналу, для дубльованих каналів, і відключення каналу для одинарних. Виявлення несправності супроводжується відповідною індикацією і записом в інформаційний масив.
Програма контролю вхідних дискретних сигналів, використовуючи міжмашину магістраль обміну інформацією, виявляє канал, що відмовив, фіксує його стан в інформаційному масиві.
Програма контролю вихідних аналогових сигналів «CONTR» здійснює порівняння числових кодів відповідних вихідних сигналів з кодами контрольного масиву (DAN02) аналогової інформації для тих же сигналів. У результаті порівняння виявляється місце відмовлення: у системі ЦАП чи в субблоках САР і СТП. Інформація про несправність заноситься в масив.
Програма контролю вихідних дискретних сигналів сполучена з програмним файлом «DIOUT» і дозволяє фіксувати стан контактів усіх вихідних реле. Програмою виробляється порівняння інформації на виході ЕОМ і інформації, що вводиться через мультиплексор СРЛ, про стан контактів СКР. Результати керування фіксуються в інформаційному масиві.
Програма «USOCON» узагальнює інформацію всіх програм контролю і формує команди на зміну алгоритму керування в залежності від стану системи, а також готує дані по діагностиці для виводу на пульт ЕОМ і субблок контролю СКС. При цьому програмою фіксуються відмовлення, як у системі УСО, та к і в вузлах мікро-ЕОМ. По факту відмовлення в системі власного УСО ЕОМ або у вузлах самої ЕОМ забезпечується переключення на резервну мікроЕОМ через СКС і переведення ЕОМ у режим діагностики. У режимі діагностики в цикл включена тільки програма «PULT» і програма виводу на пульт індикації на пульт ЕОМ «INOCON». Вивід інформації на пульт здійснюється по факту установки оператором з пульта прапора діагностики (FLAG+36H=0FFH).
Сервісні програми зібрані у файлі «PULT» і обслуговують діалоговий режим «оператор-ЕОМ». Введення команд і індикація здійснюються за допомогою пульта мікро-ЕОМ. При цьому реалізуються наступні режими:
1) індикація і зміна вмісту пам'яті ЕОМ;
2) індикація і зміна стану портів ЕОМ;
3) індикація параметрів обчислювального процесу у відсотках і абсолютних одиницях;
4) запис перехідних процесів двох параметрів в ОЗП ЕОМ;
5) переміщення і порівняння масивів в ОЗП й ін.
Блок програм нерегламентованого циклу.
Блок складають програми, що не вимагають високої швидкодії. Ці програми організовані в цикл, що перериваються всіма, описаними вище програмними блоками.
Програма введення настроєчних коефіцієнтів забезпечує обслуговуючому персоналу можливість робити підстроювання коефіцієнтів системи регулювання за допомогою кнопкового пульта, розміщеного в субблоці перемикачів СП.
Програма «TEST» і її призначення розглянуті вище.
Програми контролю теплового стану турбіни «POKZPR» і «NAGSPR» забезпечують контроль температурних напружень турбіни й обчислення припустимого діапазону зміни потужності турбоагрегату.
Бібліотека підпрограм складається з програм, що реалізують найбільш часто повторювані функції.
Похожие работы
... ї зброї і чи не будуть вони втягнені у масштабний конфлікт внаслідок цього. Висновок В результаті проведеного дослідження було проаналізовано роль Ліги арабських держав у врегулюванні регіональних та локальних конфліктів. ЛАД вже 65 років функціонує як головний міжарабський форум і одна з центральних регіональних організацій. За цей час вона брала участь у врегулюванні конфліктів різного ...
0 комментариев