Электромеханическая связь электропривода и ее характеристики
Линейные преобразования уравнений механической характеристики обобщенной машины
Фазные преобразования переменных
Структура и характеристики линеаризованного электромеханического преобразователя
Режимы преобразования энергии и ограничения, накладываемые на их протекание
Навигация
Электромеханическая связь электропривода и ее характеристики
Математическое описание динамических процессов электромеханического преобразования энергии
45518
знаков
0
таблиц
27
изображений
3. Электромеханическая связь электропривода и ее характеристики
Уравнения электрического равновесия (2.8) и уравнение электромагнитного момента (2.10) представляют собой математическое описание динамических процессов преобразования энергии во вращающихся электрических машинах, записанное в общем виде и выраженное через действительные переменные двухфазной модели. Вместе (2.8) и (2.10) образуют систему из пяти уравнений, устанавливающую взаимосвязь между процессами в механической и электрической частях электромеханической системы. Проявления этой взаимосвязи в теории электропривода называются электромеханической связью.
Для разъяснения сути этого понятия воспользуемся уравнениями электрического равновесия (2.8). В соответствии с (2.6) и (2.7) индуктивности Li,j зависят от электрического угла поворота ротора фэл, а следовательно, и от времени t. Поэтому, выполнив дифференцирование в (2.8), можно эти уравнения представить в виде

где =d/dt - угловая скорость ротора машины.
Первый член каждого уравнения (2.12) представляет собой падение напряжения на активном сопротивлении цепи данной обмотки, второй - результирующую ЭДС самоиндукции и взаимной индукции еLi вызванную изменениями токов в обмотках, а третий член отражает взаимодействие механической и электрической частей электропривода, так как представляет собой результирующую ЭДС ei наведенную в обмотке в результате механического движения ротора машины:

Наличие в (2.12) ЭДС ei, зависящих от скорости ротора двигателя, приводит к тому, что изменения скорости, вызванные процессами в механической части, вызывают изменения токов ii потребляемых обмотками машины. Рассмотренное явление представляет собой электромеханическую связь в системе электропривода, благодаря которой при питании двигателя от источника напряжения существует зависимость токов силовой цепи электропривода от его скорости. Так как токи ii благодаря электромеханической связи зависят от скорости ротора машины, то и ее электромагнитный момент, определяемый (2.10), также является функцией скорости.
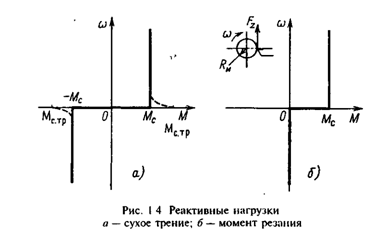
Качественными и количественными характеристиками электромеханической связи, широко используемыми в теории электропривода, являются электромеханические и механические характеристики. Электромеханическими характеристиками называются характеристики ii=f() или =f(ii), соответствующие статическим или конкретным динамическим режимам работы электропривода. Аналогичные характеристики М=f() и =f(М), связывающие в этих режимах электромагнитный момент и скорость электропривода, называются механическими характеристиками.
Уравнения электрического равновесия (2.12) выражают математическую связь между функциями ii(t) и (t) в динамических процессах электромеханического преобразования энергии. Следовательно, эти уравнения представляют собой обобщенное математическое описание электромеханических характеристик двигателя во всех режимах работы. Поэтому в дальнейшем они называются уравнениями электромеханической характеристики двигателя.
Система уравнений, составленная из уравнений электромеханической характеристики (2.12) и электромагнитного момента (2.10), устанавливает математическую связь между функциями M(t) и (t) во всех режимах работы, т. е. является обобщенным математическим описанием механических характеристик двигателя. В дальнейшем эти уравнения называются уравнениями механической характеристики.
Таким образом, уравнения (2.12) вместе с (2.10) образуют систему уравнений механической характеристики двигателя:
Все множество электромеханических и механических характеристик, определяемых (2.12) и (2.14), в зависимости от режимов работы электропривода разделяется на динамические и статические характеристики. Всем динамическим процессам соответствуют динамические электромеханические ii=f() и механические М=f() характеристики, а статическим - статические. Уравнения статических характеристик получаются из общих уравнений динамики (2.12) и (2.14) путем подстановки в них условий, соответствующих статическим режимам работы.
Электромеханическая связь объединяет механическую часть электропривода и электромеханический преобразователь в единую электромеханическую систему. Действительно, благодаря наличию этой связи электромагнитный момент двигателя реагирует на процессы, протекающие в механической части, и в свою очередь оказывает влияние на эти процессы. Как следствие, электромеханическая связь определяет важные физические свойства разомкнутых и замкнутых электромеханических систем, и ее характеристики в теории электропривода являются эффективным инструментом для изучения этих свойств. Создание электроприводов, обладающих требуемыми качествами, как ниже будет показано, практически реализуется путем формирования требуемых статических и динамических механических характеристик электропривода.
Похожие работы
... влияния неодновременного включения блоков конденсаторных батарей. При этом рассматривался процесс обжима трубчатых заготовок из алюминиевого сплава АМг2М диаметром 27 мм, 57 мм, 87 мм и толщиной 1,2 мм одновитковым, четырехвитковым цилиндрическим, индуктором-концентратором. Рассматривалось пять типов магнитно-импульсных установок основные характеристики, которых приведены в табл.5.1. Таблица ...
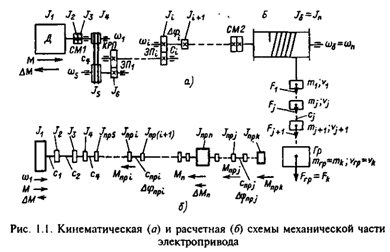


... , кроме электромагнитного момента двигателя. В заключение отметим, что на практике встречаются разветвленные кинематические схемы, которые приводят к разветвленным расчетным схемам механической части Характерным примером являются кинематические схемы многодвигательных электроприводов, в которых двигатели через индивидуальные редукторы воздействуют на общий механизм. 1. Типовые статические ...
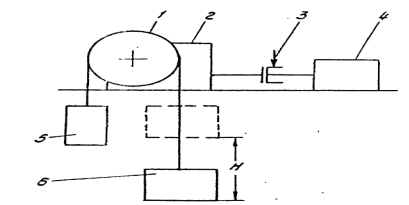
... режим работы, обеспечить выполнение требований по ускорению лифта и возможность его работы с разными грузами на подъем и на спуск. Кинематическая схема электропривода приведена на рисунке 1. Рисунок 1 - Кинематическая схема электропривода грузового лифта:1 – канатоведущий шкив; 2 –редуктор; 3 – тормозной шкив; 4 – двигатель; 5 – клеть; 6 – противовес. Технические данные транспортера ( ...





... о выборе лучшего варианта привода принимается на основе сопоставления приведенных затрат на одинаковый объем выпускаемой продукции. В данном проекте необходимо обеспечить регулирование продолжительности времени выпечки с коррекцией по температуре во второй зоне пекарной камеры. При этом необходимо учитывать, что производительность печи при замене системы привода меняться не должна, а также ...
0 комментариев