Задание С-3. Определение реакций опор составной конструкции
Вариант № 1.
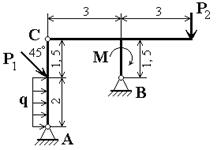
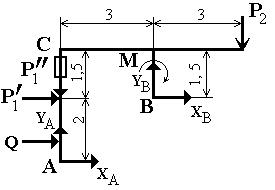
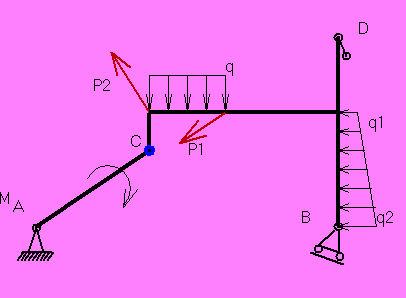
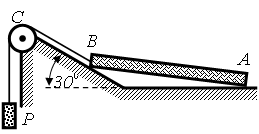
Найти реакции опор и давление в промежуточном шарнире составной конструкции. Схема конструкции представлена на рис. 1 (размеры – в м), нагрузка указана в таблице 1.
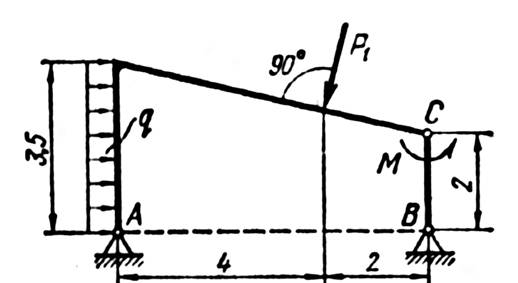
Рис. 1
Таблица 1.
| P1, кН | М, кН×м | q, кН/м |
| 6,0 | 25,0 | 0,8 |
С-3. Определение реакций опор составной конструкции
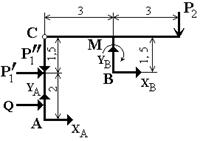
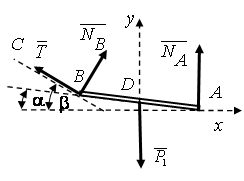
Решение. Рассмотрим систему уравновешивающихся сил,  приложенных ко всей конструкции (рис. 2).
приложенных ко всей конструкции (рис. 2).
y
P1y P1
90°
P1x C
Q M
RAy RBy
RAx RBx x
A B
Рис. 2.
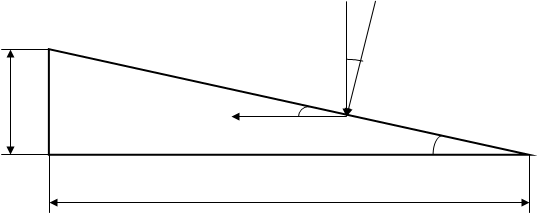
Разложим силу P на составляющие Px и Py.
P1y P1
a
P1x a a
6
Рис. 3.
P1x = P1×sin(a),
P1y = P1×cos(a).
a = arctg(1,5/6) = arctg(0,25) = 14°.
P1x = P1×sin(a) = P1×sin(14°) = 6×0,24 = 1,44 (кН),
P1y = P1×cos(a) = P1×cos(14°) = 6×0,97 = 5,82 (кН).
Q = q×3,5 = 0,8×3,5 = 2,8 (кН).
С-3. Определение реакций опор составной конструкции.
Запишем уравнения равновесия:
![]()
![]() (1)
(1)
![]()
![]() (2)
(2)
![]()
 (3)
(3)
Данная система из 3 уравнений содержит 4 неизвестных, для их нахождения рассмотрим отдельно правую и левую части конструкции.
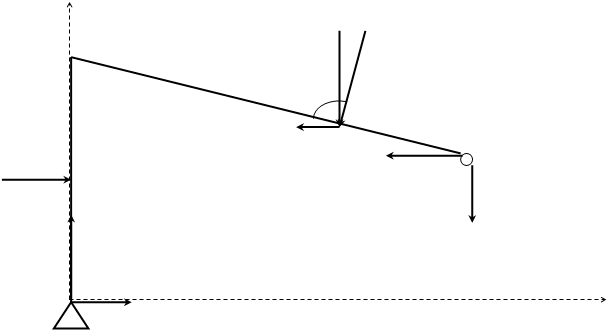
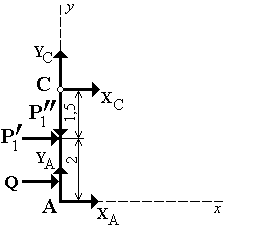
Рассмотрим систему уравновешивающихся сил, приложенных к левой части конструкции (рис.4):
 y
y
P1y P1
90°
P1x C
RCx
Q RCy
RAy
RAxx
A
Рис. 4.
Запишем уравнения равновесия:
![]()
![]() (4)
(4)
![]()
![]() (5)
(5)
С-3. Определение реакций опор составной конструкции
![]()
 (6)
(6)
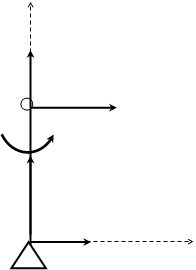
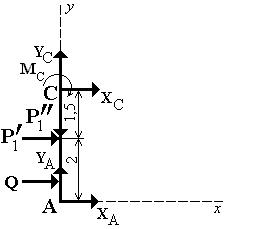
Рассмотрим систему уравновешивающихся сил, приложенных к правой части конструкции (рис.5):
 y
y
R`Cy
R`Cx
C
M
RBy
RBx x
B
Рис.5.
Запишем уравнения равновесия:
![]()
![]() (7)
(7)
![]()
![]() (8)
(8)
![]()
![]() (9)
(9)
где RCx = R`Cx, RCy = R`Cy.
Таким образом, имеем систему 4 уравнений (1), (2), (6) и (9) с 4 неизвестными.
Из уравнения (9)

Из уравнения (1)
![]()
С-3. Определение реакций опор составной конструкции
Из уравнения (6)
Из уравнения (2)
![]()
Найдем реакции шарнира С:
RCx = -RBx = 12,5 кН,
RCy = -RBy = 0,07 кН.
Отрицательные значения RBx и RBy говорят о том, что действительное направление RBx и RBy противоположно указанному на рис.4.
Итак,
С-3. Определение реакций опор составной конструкции
Найти реакции опор конструкции изображенной на рис.1.
| |
|
| Дано: Q = 2, G = 20, a = 20, b = 30, c = 10 R =15, r =5. Решение: Разложим реакции в опорах А и Б на их составляющие по осям коардинат, при этом RAy=RBy=RDy=0 |
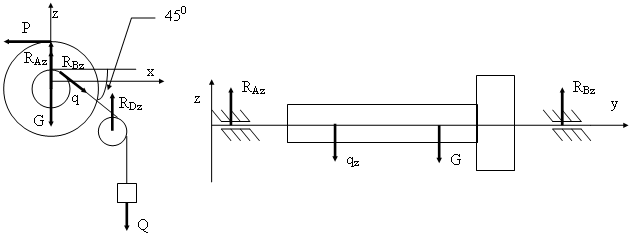
Составим уравнения сумм моментов относительно всех осей:
Р*15-q*5=0, где , отсюда Р=(q*5)/15
-qx*20+P*60-RBx*80, отсюда RBx=(qx*20-P*60)/80
-qx*20-G*(20+30)+RBz*(20+30+30) отсюда RBz= (qx*20+G*50)/80
-Raz*80+qz*60+G*30=0 отсюда Raz= (qz*60+G*30)/80
Rax*80+ qx*60-P*30=0 отсюда Rax=-( qx*60-P*30)/80
qx=Q*cos45; qz=Q*sin45
Ra= RB=
Результаты работы
| Raz | Rax | Ra | RBz | RBx | RB |
Применение теоремы об изменении кинетической энергии к изучению движения механической системы.
Вариант № 1.
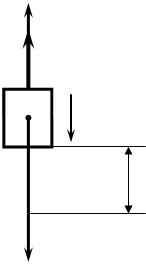
Механическая система под действием сил тяжести приходит в движение из состояния покоя; начальное положение системы показано на рис. 1. Учитывая трение скольжения тела 1, пренебрегая другими силами сопротивления и массами нитей, предполагаемых нерастяжимыми, определить скорость тела 1 в тот момент, когда пройденный им путь станет равным s.
В задании приняты следующие обозначения: m1, m2, m3, m4 – массы тел 1, 2, 3, 4; b - угол наклона плоскости к горизонту; f – коэффициент трения скольжения.
Необходимые для решения данные приведены в таблице 1. Блоки и катки считать сплошными однородными цилиндрами. Наклонные участки нитей параллельны соответствующим наклонным плоскостям.
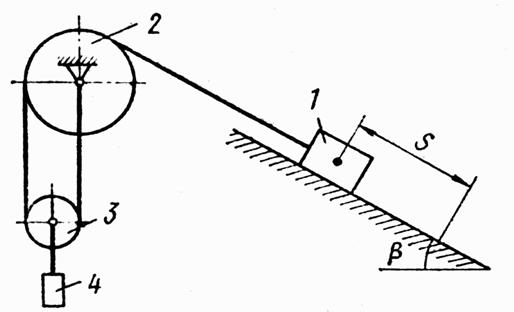
Рис. 1
Таблица 1.
| m1, кг | m2, кг | m3, кг | m4, кг | b, град | f | s, м |
| m | 4m | 0,2m | 4m/3 | 60 | 0,10 | 2 |
Решение.
Применим теорему об изменении кинетической энергии системы:
![]() (1)
(1)
где T0 и T – кинетическая энергия системы в начальном и конечном положениях; ![]() - сумма работ внешних сил, приложенных к системе;
- сумма работ внешних сил, приложенных к системе; ![]() - сумма работ внутренних сил системы.
- сумма работ внутренних сил системы.
Для рассматриваемых систем, состоящих из абсолютно твердых тел, соединенных нерастяжимыми нитями,
![]()
Так как в начальном положении система находится в покое, то Т0=0.
Следовательно, уравнение (1) принимает вид:
![]() (2)
(2)
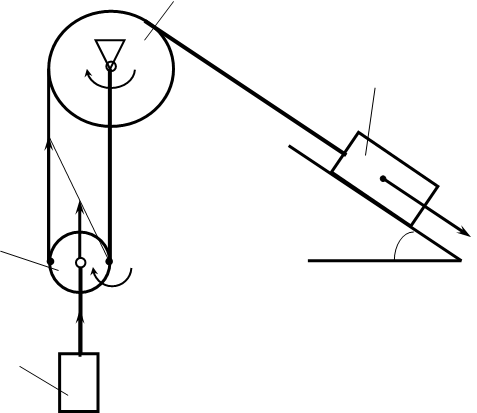
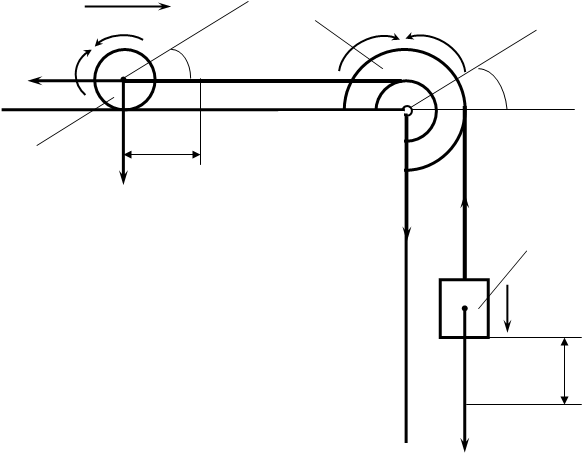
Кинетическая энергия рассматриваемой системы Т в конечном ее положении (рис.2) равна сумме кинетических энергий тел 1, 2, 3 и 4:
Т = Т1 + Т2 + Т3 + Т4. (3)
 2
2
1
w2
VA
V3
3 b V1
A C3 CVw3
V4
4
Рис. 2.
Д-10
Кинетическая энергия груза 1, движущегося поступательно,
![]() (4)
(4)
Кинетическая энергия барабана 2, совершающего вращательное движение,
![]() , (5)
, (5)
где J2x – момент инерции барабана 2 относительно центральной продольной оси:
![]() , (6)
, (6)
w2 – угловая скорость барабана 2:
![]() . (7)
. (7)
После подстановки (6) и (7) в (5) выражение кинетической энергии барабана 2 принимает вид:
![]() . (8)
. (8)
Кинетическая энергия барабана 3, совершающего плоское движение:
![]() , (9)
, (9)
где VC3 – скорость центра тяжести С3 барабана 3, J3x – момент инерции барабана 3 относительно центральной продольной оси:
![]() , (10)
, (10)
w3 – угловая скорость барабана 3.
Так как двигается по нити без скольжения, то мгновенный центр скоростей находится в точке СV. Поэтому
![]() , (11)
, (11)
![]() . (12)
. (12)
Подставляя (10), (11) и (12) в (9), получим:
![]() . (13)
. (13)
Кинетическая энергия груза 4, движущегося поступательно,
![]() , (14)
, (14)
где V4 = VC3 = V1/2:
![]() . (15)
. (15)
Кинетическая энергия всей механической системы определяется по формуле (3) с учетом (4), (8), (13), (15):
![]()
Подставляя и заданные значения масс в (3), имеем:
![]()
или
![]() . (16)
. (16)
Найдем сумму работ всех внешних сил, приложенных к системе, на заданном ее перемещении (рис. 3).
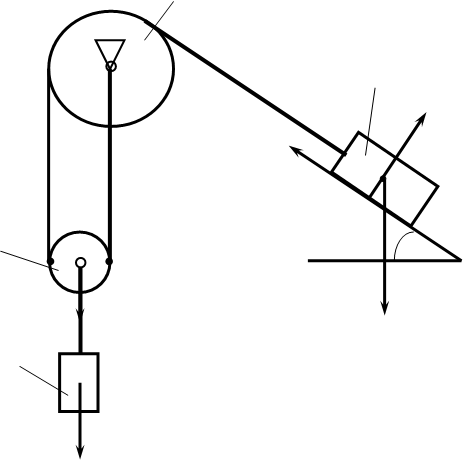 2
2
1
N1
FTP
3 b
C3P3 P1
4
P4
Рис. 2.
Работа силы тяжести ![]() :
:
![]() (17)
(17)
Работа силы трения скольжения ![]() :
:
![]()
Так как
![]()
то
![]() (18)
(18)
Работа силы тяжести ![]() , препятствующей движению тела 1:
, препятствующей движению тела 1:
![]() (19)
(19)
Работа силы тяжести ![]() , препятствующей движению тела 1:
, препятствующей движению тела 1:
![]() (20)
(20)
Сумма работ внешних сил определится сложением работ, вычисляемых по формулам (17) – (20):
![]() .
.
Подставляя заданные значения масс, получаем:
![]()
или
![]() . (21)
. (21)
Согласно теореме (2) приравняем значения Т и ![]() , определяемые по формулам (16) и (21):
, определяемые по формулам (16) и (21):
![]() ,
,
откуда
![]() м/с.
м/с.
Д-10
Задание Д-19. Применение общего уравнения динамики к исследованию движения механической системы с одной степенью свободы.
Вариант № 1.
Для заданной механической системы определить ускорения грузов и натяжения в ветвях нитей, к которым прикреплены грузы. Массами нитей пренебречь. Трение качения и силы сопротивления в подшипниках не учитывать. Система движется из состояния покоя.
Необходимые для решения данные приведены в таблице 1. Блоки и катки, для которых радиусы инерции в таблице не указаны, считать сплошными однородными цилиндрами.
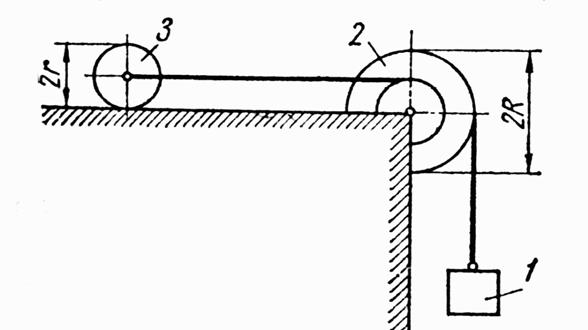
Рис. 1
Таблица 1.
| G1, кг | G2, кг | G3, кг | R/r | i2x |
| G | G | 3G | 2 |
|
Решение.
Применим к решению задания общее уравнение динамики. Так как система приходит в движение из состояния покоя, направления ускорений тел соответствуют направлениям их движения. Движение таково, что груз 1 опускается.
Покажем задаваемые силы: силы тяжести ![]() - груза 1,
- груза 1, ![]() - блока 2 и
- блока 2 и ![]() - катка 3 (рис. 2).
- катка 3 (рис. 2).
a3
M3Ф 2 e2 M3Ф
Ф3 e3 dj3
dj2
ds3
3
G3
Ф1
G2 1
a1
ds3
G1
Рис. 2.
Приложим силы инерции. Сила инерции груза 1, движущегося поступательно с ускорением ![]() :
:
![]() .
.
Силы инерции блока 2, вращающегося вокруг неподвижной оси с угловым ускорением e2, приводятся к паре, момент которой
![]()
![]()
Силы инерции катка 3, совершающего плоское движение, приводятся к силе
![]() ,
,
где ![]() - ускорение центра масс катка 3, и к паре сил, момент которой
- ускорение центра масс катка 3, и к паре сил, момент которой
![]() ,
,
где e3 – угловое ускорение катка 3, J3 – момент инерции катка 3 относительно центральной продольной оси:
![]() .
.
Сообщим системе возможное перемещение в направлении ее действительного движения (рис. 2). Составим общее уравнении динамики:
![]() , (1)
, (1)
где dj2 и dj3 – углы поворотов блоков 2 и 3.
Учитывая, что G1 = G2 = G = mg, G3 = 3G = 3mg
имеем:
![]()
![]()
![]()
![]() (2)
(2)
![]()
Устанавливаем зависимости между возможными перемещениями, входящими в (1), и между ускорениями в (2), пользуясь тем, что эти зависимости такие же, как между соответствующими скоростями:
![]() dj2 = dj3 = ds1/R = ds1/2r;
dj2 = dj3 = ds1/R = ds1/2r;
ds3 = dj2r = ds1/2; (3)
e2 = e3 = a1/2r; a3 = a1/2.
С учетом (2) и (3) уравнение (1), после деления всех его членов на m и ds1, принимает вид
![]()
откуда
 ,
,
а3 = a1/2 = 1,87 м/с2.
 а3
а3
M3Ф
Ф3 e3 dj3 Т2-3
ds3
G3
Рис. 3.
 Ф1
Ф1
Т1-2
а1
ds1
G1
Рис. 4.
Для определения натяжения в нити 2-3 мысленно разрежем эту нить и заменим ее действие на каток 3 реакцией T2-3 (рис. 3).
Общее уравнение динамики:
![]() ,
,
откуда
![]()
Для нахождения натяжения в нити 1-2 мысленно разрежем эту нить и заменим ее действие на груз 1 реакцией T1-2 (рис. 4).
Не составляя общего уравнения динамики, на основании принципа Даламбера имеем:
![]()
Задание К-3. Определение скоростей и ускорений точек твердого тела при плоском движении.
Вариант № 1.
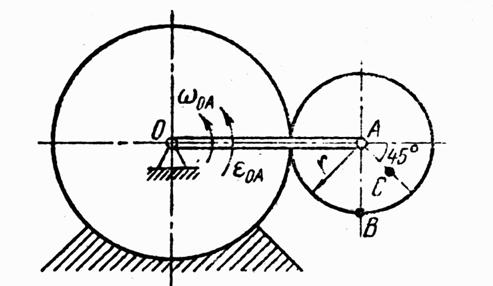
Рис. 1
Найти для заданного положения механизма скорости и ускорения точек В и С. Схема механизма представлена на рис. 1, необходимые для расчета данные приведены в таблице 1.
Таблица 1.
| Размеры, см | wОА, с-1 | eОА, с-2 | ||
| ОА | r | АС | ||
| 40 | 15 | 8 | 2 | 2 |
Решение.
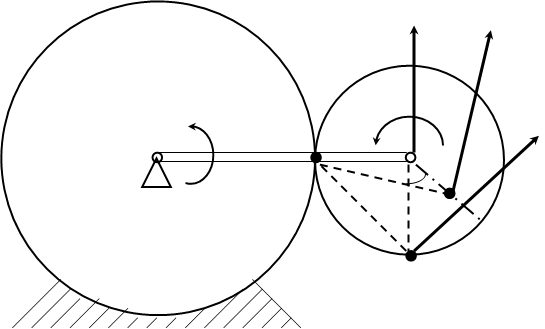
Определение скоростей точек.
Вычислим скорость точки А при заданном положении механизма:
VA = wОА×OA = 2×40 = 80 см/с.
Скорость точки А направлена перпендикулярна к ОА. Мгновенный центр скоростей СV находится в точке соприкосновения колес.
Угловая скорость колеса
wК = VA/r = 80/15 = 5,33 c-1
Скорости точек В и С:
VB = wК×ВСV;
VС = wК×ССV,
где
ВСV = r×![]() = 15×1,41 = 21,2 см,
= 15×1,41 = 21,2 см,
ССV = ![]() см.
см.
Следовательно,
VB = wК×ВСV = 5,33×21,2 = 113 см/с;
VС = wК×ССV = 5,33×21,4 = 114,1 см/с.
Вектор ![]() направлен перпендикулярно к отрезку BCV, а вектор
направлен перпендикулярно к отрезку BCV, а вектор ![]() - перпендикулярно к отрезку CCV в сторону вращения колеса.
- перпендикулярно к отрезку CCV в сторону вращения колеса.
 VA
VA
VC
wК
O wOA CV A VB
45°
C
r
B
Рис. 2
К-3
Определение ускорений точек.
Ускорение точки А складывается из вращательного и центростремительного ускорений:
![]() ;
;
![]() см/с2;
см/с2;
![]() см/с2.
см/с2.
Вектор ![]() направлен от А к О. Вектор
направлен от А к О. Вектор ![]() перпендикулярен к вектору
перпендикулярен к вектору ![]() и направлен в соответствии с направлением углового ускорения eОА.
и направлен в соответствии с направлением углового ускорения eОА.
Согласно теореме об ускорениях точек плоской фигуры имеем:
![]() .
.
Центростремительное ускорение точки В во вращательном движении колеса вокруг полюса А:
![]() см/с2.
см/с2.
Вращательное ускорение точки В:
![]() ,
,
где
![]() с-2,
с-2,
![]() см/с2.
см/с2.
Вектор ![]() направлен от В к А. Вектор
направлен от В к А. Вектор ![]() перпендикулярен к вектору
перпендикулярен к вектору ![]() и направлен в соответствии с направлением углового ускорения eK.
и направлен в соответствии с направлением углового ускорения eK.
Ускорение точки В находим способом проекций:
![]() см/с2;
см/с2;
![]() см/с2;
см/с2;
![]() см/с2.
см/с2.
Определяем ускорение точки С:
![]() .
.
Центростремительное ускорение точки С во вращательном движении колеса вокруг полюса А:
![]() см/с2.
см/с2.
К-3
Вращательное ускорение точки С:
![]() см/с2.
см/с2.
Вектор ![]() направлен от С к А. Вектор
направлен от С к А. Вектор ![]() перпендикулярен к вектору
перпендикулярен к вектору ![]() и направлен в соответствии с направлением углового ускорения eK.
и направлен в соответствии с направлением углового ускорения eK.
Ускорение точки С находим способом проекций:


![]() см/с2.
см/с2.
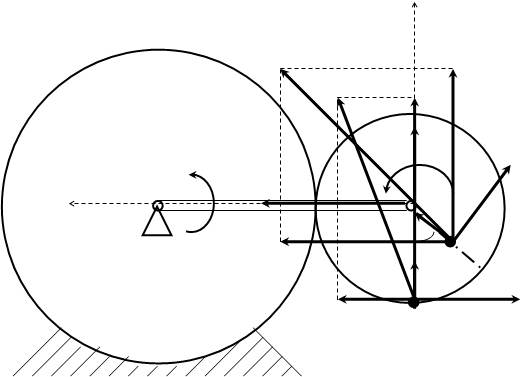 y
y
aC aCy
aBy
aB
aAt
eOA eK aACt
x O aAn A
aACn
C
aCx 45°
aABn
aBx B aABt
Рис. 3
К-3
Задание K-1. Определение скорости и ускорения точки по заданным уравнениям ее движения.
Вариант № 1.
По заданным уравнениям движения точки М установить вид ее траектории и для момента времени t = t1(c) найти положение точки на траектории, ее скорость, полное, касательное и нормальное ускорения, а также радиус кривизны траектории в соответствующей точке. Данные приведены в таблице 1.
Таблица 1.
| Уравнения движения | t1(c) | |
| x = x(t), см | y = y(t), см | |
| -2t2+3 | -5t | 0,5 |
K-1
Решение.
Исходные данные в см и с:
x = -2t2 + 3; y = -5t; (1)
t1 = 0,5
Уравнения движения (1) являются параметрическими уравнениями траектории точки М. Чтобы получить уравнение траектории в обычной координатной форме, исключим время t из уравнений движения. Тогда
25x + 2y2 = 75 (2)
Это уравнение параболы.
Для определения скорости точки находим проекции скорости на оси координат:
Vx = x’ = -4t см/с; Vy = y’ = -5 см/с.
Модуль скорости точки
![]() . (3)
. (3)
Аналогично проекции ускорения точки
ax = x’’ = -4 см/с2; ay = y’’ = 0.
Модуль ускорения точки
![]() см/с2.
см/с2.
Касательное ускорение находим путем дифференцирования модуля скорости (3)
![]()
![]()
При t = 0,5 c
x = -2×0,52 + 3 = 2,5 см, y = -5×0.5 = -2,5 см.
Vx = -4×0,5 =-2 см/с, Vy = -5 см/с, V = 5,38 см/с.
ax = -4 см/с2, ay = 0, a = 4 см/с2
![]() см/с2
см/с2
K-1
Модуль касательного ускорения
at = 1,487 см/с2
Знак “+” при dV/dt показывает, что движение точки ускоренное и, следовательно, направления ![]() совпадают.
совпадают.
Нормальное ускорение точки:
![]() см/с2.
см/с2.
Радиус кривизны траектории в той точке, где при t = 0,5 с находится точка М:
![]() см.
см.
Пользуясь уравнением (2), строим траекторию (рис. 1) и показываем на ней положение точки М в заданный момент времени. Вектор ![]() строим по составляющим
строим по составляющим ![]() , причем он направлен по касательной к траектории точки. Вектор
, причем он направлен по касательной к траектории точки. Вектор ![]() находим как по составляющим
находим как по составляющим ![]() , так и по
, так и по ![]() .
.
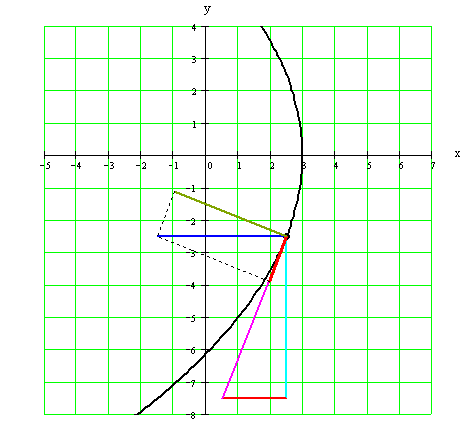 |
Рис. 1
Задание К-2. Определение скоростей и ускорений точек твёрдого тела при поступательном и вращательном движениях.
 Вариант № 1.
Вариант № 1.
Дано:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Определить коэффициенты ![]() ,
, ![]() и
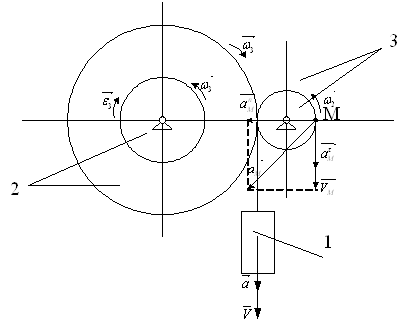
и ![]() , при которых осуществляется требуемое движение груза 1. Определить так же в момент времени
, при которых осуществляется требуемое движение груза 1. Определить так же в момент времени ![]() скорость и ускорение груза и точки М одного из колёс механизма.
скорость и ускорение груза и точки М одного из колёс механизма.
Решение:
Уравнение движения груза 1 имеет вид:
![]() (1).
(1).
Коэффициенты ![]() ,
, ![]() и
и ![]() могут быть определены из следующих условий:
могут быть определены из следующих условий:
при ![]()
![]()
![]() (2).
(2).
при ![]()
![]() (3).
(3).
Скорость груза 1:
![]() (4).
(4).
Подставляя (2) и (3) в формулы (1) и (4), находим коэффициенты:
![]()
![]()
![]()
Таким образом уравнение движения груза 1:
![]() (5).
(5).
Скорость груза 1:
![]() (6).
(6).
Ускорение груза 1:
![]()
Для определения скорости и ускорения точки М запишем уравнения, связывающие скорость груза ![]() и угловые скорости колёс
и угловые скорости колёс ![]() и
и ![]() .
.
В соответствии со схемой механизма
 (7).
(7).
откуда
![]()
или с учётом (6) после подстановки данных:
![]()
Угловое ускорение колеса 3:
![]()
Скорость точки М, её вращательное, центростремительное и полное ускорения определяются по формулам:
![]()
![]()
![]()
![]()
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Выполнил: ст.гр. С-045 rus Калайчиди Виктор
Проверил: Русу В.Н.
| Шифр | Вариант |
| 61 | 16 |
![]() Дано: схема механизма,
Дано: схема механизма,
Sr=OM=20 sin рt см
t1=1/3 c
a=20 cм
Решение:
Положение М на фигуре D определяется расстоянием Sr=OM
При t=1/3 c
Sr=20 sin р/3 =17.32 cм
Абсолютная скорость точки М
V=Vr+Ve
Модуль относительной скорости
Vr=| Vr |
Vr=dSr/dt=20р cos рt
При t=1/3 c
Vr=10 р=31.41 cм/с
Положительный знак у величины Vr показывает, что вектор Vr направлен в сторону возрастания Sr
Модуль переносной скорости
Ve=Rщe
R= Sr2+a2 =26.46 см
щe=|щe| щe=dцe/dt=1-t c-1
При t=1/3
щe= 0.67 c-1
Положительный знак у величины щe показывает, что вращение фигуры D происходит вокруг Оz по направлению отсчета угла ц. Вектор щe направлен на наблюдателя.
Переносная скорость
Ve=17.73 см/с
Вектор Ve направлен по касательной к окружности вращения т.М
Из теоремы косинусов найдём
V=Vr2+ Ve2 - 2VrVeсos б
cos б = a/R = 0.76
V=21.32 cм/с
Абсолютное ускорение точки равно геом. сумме относительного, переносного, и кориолисова ускорений
W=Wr+We+Wc
W=Wrф+Wrn+Weв +Weц+Wc
Wrф= d2Sr/dt2 =-20р2 sin рt
При t=1/3 c
Wrф= -170.77 cм/с2
Wrф=170.77 cм/с2
Знак “-“ показывает, что Wrф направлен в сторону убывания Sr
Wrn=Vr2/с=0 (с=∞)
Модуль переносного вращательного ускорения
Weв=Rеe
еe= d2цe/dt2=-1 c-2
Weв= -26.46 cм/с2
Разные знаки у величин еe и щe говорят о замедленном движении круга D, вектора еe и щe противоположно направленны.
Weц=R щe2=11.88 cм/с2
Вектор Weц направлен к центру окружности L
Wc=2щe x Vr
Wc=2щeVr sin(щe Vr)
sin(щe Vr)=1
Wc=2щeVr=48.09 cм/с2
По методу проекций имеем
Wx= Weв cos б - Weц cos(90-б) - Wrф=
Wy= Wc-Weв sin б - Weц sin(90-б) =
W= Wx2+ Wy2=
| щe, c-1 | Скорость, см/с | еe,c-2 | Ускорение, см/с2 | |||||||||||
| Vr | Ve | V | Wrф | Wrn | Weв | Weц | Wc | Wx | Wy | W | ||||
| 0.67 | 31.41 | 17.73 | 21.32 | -1 | -170.77 | 0 | -26.46 | 11.88 | 48.09 | |||||
Похожие работы
... (1) где кН. После подстановки данных и вычислений уравнение (1) получает вид: кН (1’) Второе уравнение с неизвестными и получим, рассмотрев систему уравновешивающихся сил, приложенных к части конструкции, расположенной левее шарнира С (рис. 3): Рис. 3. . Отсюда находим, что кН. Подставив найденное значение в уравнение (1’) найдем значение ...
а , откуда Запишем уравнение и с учётом постоянных интегрирования и В положении B, при имеем: Запишем уравнение при Рассмотрим движение тела на участке BC , T – время движения тела от B до C Знаем: В проекциях на оси имеем: или , т.е. или или , т.е. Для определения постоянных интегрирования запишем начальные условия движения на участке BC. ...
ходные данные к проекту согласно методическим материалам. Вариант N20. Разработать программу для расчёта реакций составной конструкции при шарнирной и скользящей заделке. Оценить варианты построения системы по минималу реакций опор А. Исследовать зависимость реакции опоры А от направления силы Р1. Построить графики зависимости реакций опоры в зависимости от направления действия силы Р1 в ...
... , а в ходе решения обрести уверенность, что ответ получен правильный. Для этого решение необходимо проверить, специалисты сказали бы – «провести экспертизу проекта». В пособии показано, как в задачах статики можно провести подобную экспертизу, то есть путем проверки убедиться в правильности решения. Общие методические указания Основная практическая задача статики - определение реакций связей, ...
0 комментариев