Навигация
Визначити значення R i (15–00 – R). R=11–35, (15–00-R)=3–65
38111
знаков
5
таблиц
7
изображений
1. Визначити значення R i (15–00 – R). R=11–35, (15–00-R)=3–65
2. По дирекційному куту aц визначити четверть i знаки прирощення координат (в IV чв.: «+» ΔХ; « – «ΔY)
3. Обчислити значення прирощення координат ΔХ, ΔY:
а) ΔХ = Д * sin (15 – R), для чого початок (кінець) движку встановлюють на значення дальності Д по шкалі чисел лінійки NQ+1. Візир центр. рискою встановлюють на значення кута (15-R) по шкалі S або SіТ і по рисці візира на шкалі чисел лінійки NQ+1 читають значення: ΔХ=+1210.
б) ΔY= sin R, для чого не збиваючи положення движка (при необхідності – перемістити движок на значення Д іншим кінцем шкали), встановлюють візир центральною рискою на значення кута R по шкалі S або SіТ, і під рискою візира на шкалі чисел лінійки NQ+1 читають значення ΔY=-3010.
Примітка: для визначення порядка числа значень прирощення координат ΔХ і ΔY використовують правило:
– якщо кути R (15-R) визначались по шкалі Sin, то 0,1Д < |ΔУ| (чи |ΔХ|) < Д.
– якщо кути R (15-R) визн. по шкалі SіТ, то 0,01Д < |ΔУ| (чи |ΔХ|) < 0,1Д.
– якщо кути R (15-R) визн. по точках шкали SіТ, то 0,001Д < |ΔУ| (чи |ΔХ|)< 0,01Д.
4. Визначити координати цілі: Хц = Хап + ΔХ; Хц =79 020;
Yц = Усп + ΔY; Yц =10 305
б) обчислення прямої геодезичної задачі за допомогою обчислювача СТМОбчислення прирощень координат (частковий випадок рішення прямої геодезичної задачі) виробляється за допомогою обчислювача, користуючись допоміжною таблицею1, що нанесена на внутрішньому крузі.
Згідно цієї таблиці значення прирощень координат ΔХ та ΔY будуть отримані як результат множення відстані Д відповідно на:
– sin (15-a) і на sin (a) у першій чверті;
– sin (a-15) і на sin (30-a) у другій чверті;
– sin (45-a) і на sin (a-30) у третій чверті;
– sin (a-45) і на sin (60-a) у другій чверті.
Для виконання множення:
1) суміщають нульовий радіус рухомого круга відліком, що відповідає значенню Д;
2) встановлюють індекс движка на значення відповідного кута (згідно таблиці 1) по шкалі синусів 4 (якщо кут у межах від 0–95,7 до 15–00,0) або по шкалі синусів 5 (якщо кут у межах від 0–09,6 до 0–95,7);
3) знімають напроти індексу движка по шкалі чисел 3 відлік, що відповідає значенню прирощення координат.
Для визначення порядку прирощення координат використовують
правило:
– якщо кут у межах від 0–95,7 до 15–00,0, то: 0,1Д < |ΔУ| (чи |ΔХ|) < Д;
– якщо кут у межах від 0–09,6 до 0–95,7, то: 0,01Д < |ΔУ| (чи |ΔХ|) < 0,1Д;
– якщо кут у межах від 0–00,0 до 0–09,6, то: 0,001Д < |ΔУ| (чи |ΔХ|) < 0,01Д.
Приклад: обчислити прирощення координат, якщо дальність Д= 635 м, дирекційний кут a=28–45,5:
1) за таблицею 1 обчислюють кути (a-15) і (30-a) для визначення ΔХ і ΔУ, ці кути будуть дорівнювати відповідно 13–45,5 і 1–54,5;
2) суміщають нульовий радіус рухомого круга з відліком «635», що відповідає дальності 635 м по шкалі чисел 3;
3) встановлюють індекс движка на відлік 13–45,5 по шкалі 4 і напроти індексу по шкалі 3 знімають відлік «626», що відповідає значенню прирощення ΔХ=626 м;
4) встановлюють індекс движка на відлік 1–54,5 по шкалі 4 і напроти індексу по шкалі 3 знімають відлік «102», що відповідає значенню прирощення ΔУ=102 м.
Знаки прирощень – відповідно таблиці 1.
в) обчислення прямої геодезичної задачі за допомогою мікрокалькуляторів.Мікрокалькулятори вітчизняних та відомих зарубіжних виробників дозволяють обчислювати прирощення координат при рішенні ПГЗ без переходу від дирекційного кута до румбу.
Рішення за допомогою інженерних калькуляторів:
1. Ввести значення дирекційного кута в поділках кутоміра, відокремивши великі поділки від малих комою.
2. Натиснути ´, 6 для переведення п.к. у градуси і долі градуса.
3. Натиснути М+.
4. Натиснути F COS.
5. Ввести дальність.
6. Натиснути ´.
7. Ввести Ха.
8. Натиснути +.
9. Зчитати на дисплеї значення координати Х визначаємої точки.
10. Натиснути MR.
11. Натиснути F SIN.
12. Ввести дальність.
13. Натиснути ´.
14. Ввести Yа.
15. Натиснути +.
16. Зчитати на дисплеї значення координати Y визначаємої точки.
При використанні вітчизняних програмуємих калькуляторів МК-61, МК-52 можливе рішення як в режимі виконання програми, так і в ручному режимі.
Рішення в режимі виконання програми прискорює процес рішення і зменшує імовірність помилки оператора при рішенні, але потребує попереднього введення (виклик з пам’яті для МК-52) відповідної програми і рішення контрольного прикладу; тому воно доцільне при виконанні великої кількості подібних задач (наприклад, визначення координат цілей, засічених з одного СП).
Програма для рішення ПГЗ:
| Крок | Дія | Код | Крок | Дія | Код | |
| 00 | В | ОЕ | 08 | F sin | 1С | |
| 01 | 6 | 06 | 09 | ´ | 12 | |
| 02 | ´ | 12 | 10 | П®х 2 | 62 | |
| 03 | х®П 3 | 43 | 11 | + | 10 | |
| 04 | F cos | 1Г | 12 | ' | 14 | |
| 05 | ´ | 12 | 13 | П®х 1 | 61 | |
| 06 | ' | 14 | 14 | + | 10 | |
| 07 | П®х 3 | 63 | 15 | с/п | 50 |
Розподіл регістрів:
R1 – ХА, R2 – УА, R3 – a.
Порядок рішення:
1. Перемикач системи кутів поставити у положення «Г» (градуси).
2. Ввести ХА у регістр R1: набрати ХА, натиснути х-П 1.
3. Ввести УА у регістр R2: набрати УА, натиснути х-П 2.
4. Ввести Д.
5. Натиснути 2 рази кнопку В.
6. Ввести a.
7. Натиснути в/о, с/п.
8. По закінченню виконання програми на дісплеї зчитати значення ХВ.
9. Натиснути ', на дисплеї зчитати значення УВ.
При повторному рішенні задачі з тими ж самими значеннями ХА і УА у відповідні регістри їх не вводити (тобто починати виконання з пункту 4), бо вони зберігаються у цих регістрах, доки не буде вимкнено живлення або оператор не змінить їх сам.
Контрольний приклад:
Ввести: 1000 х-П 1 2000 х-П 2 444 В В 33 в/о с/п.
Після закінчення виконання програми на дисплеї: 577,730906.
Натиснути ', на дисплеї: 1862,7964544.
Рішення в ручному режимі доцільне, коли машинна пам’ять використовується для зберігання програм рішення більш громіздких задач; задача буде виконуватись одноразово і оператор передбачає проведення контролю обчислень, хоча б грубо.
Порядок рішення:
1. Перемикач системи кутів поставити у положення «Г» (градуси).
2. Ввести Д.
3. Натиснути 2 рази кнопку В.
4. Ввести a.
5. Натиснути В 6 * х-П 3 F sin * ' П-х 3 F cos *.
6. Ввести XА.
7. Натиснути +, на дисплеї зчитати значення XВ.
8. Натиснути '.
9. Ввести YА.
10. Натиснути +, на дисплеї зчитати значення YВ.
Останнім часом надійшли до продажу інженерні калькулятори зарубіжного виробництва, що мають вбудовані функції переобчислення полярних координат в прямокутні і навпаки, що дозволяє безпосередньо обчислювати прирощення координат. Використання цих функцій здійснюється за допомогою клавіш a i b у поєднанні з функціональною клавішею 2ndF. Вирішення прямої геодезичної задачі за допомогою таких калькуляторів здійснюється в наступній послідовності.
1. Увімкнути калькулятор.
2. Упевнитись, що калькулятор налаштований для роботи у градусній системі (не у радіанах і не у градах), – у верхній частині індикатора виведено DEG (а не RAD і не GRAD).
3. Ввести значення дирекційного кута в поділках кутоміра, відокремивши великі поділки від малих комою.
4. Натиснути ´, 6 для переведення п.к. у градуси і долі градуса; натиснути b.
5. Ввести значення дальності, натиснути а.
6. Натиснути 2ndF, b; (на дисплеї – значення Dх); натиснути х®М.
7. Натиснути b +, ввести значення Усп, натиснути =; прочитати за дисплеї значення Уц.
8. Натиснути MR +, ввести значення Xсп, натиснути =; прочитати на дисплеї значення Xц.
6.3 Вирішення оберненої геодезичної задачі на площині
Вирішення оберненої геодезичної задачі (ОГЗ) на площині полягає у визначенні дирекційного кута a і відстані Д по відомим різницям координат двох точок ΔХ та ΔY.
Рішення ОГЗ виконують у наступній послідовності:
1. Визначають тангенс гострого кута R, утвореного віссю ОХ і напрямком АВ за формулою:
![]()
По величині ![]() знаходять кут в першій чверті
знаходять кут в першій чверті ![]() .
.
2. Від кута ![]() переходять до дирекційного кута a у відповідності зі знаками прирощень Dх і Dу. (рис. хх).
переходять до дирекційного кута a у відповідності зі знаками прирощень Dх і Dу. (рис. хх).
3. Обчислюють відстань між точками А і В за формулами:
![]() при R>45° (7–50);
при R>45° (7–50);
![]() при R<45° (7–50).
при R<45° (7–50).
При аналітичному методі рішення ОГЗ на АЛЛ, визначення дирекційного кута і дальності здійснюється не через (R), а через кут ρ – гострий кут, створений вісcю Х або У і напрямком на визначаєму точку (орієнтир, ціль). Це викликано тим, що шкала тангенсів на движку АЛЛ в межах від 0–00 до 7–50. Відповідно кут (ρ) може приймати значення від 0–00 до 7–50.
Позначимо менше (за абсолютною величиною) прирощення координат через b, а більше прирощення через а.
![]() ,
, ![]()
Перехід від кута (ρ) до дирекційного кута здійснюється з використанням таблиці, яка нанесена на зворотній стороні корпуса лінійки.
Приклад: Визначити дирекційний кут і дальність до цілі, якщо:
Ц _ Х=77870 У=08895
ВП Х=73485 У=09307
ΔХ=+4385 ΔУ=–412
(а) (b)
Рішення:
1. Визначити прирощення координат ΔХ і ΔУ.
2. Визначити значення кута (ρ). Для чого візир центральною рискою встановити на значення «b» меншого прирощення по шкалі чисел (NQ+1) корпуса лінійки. Початок (кінець) шкали движка лінійки встановити на значення «а» більшого прирощення координат по шкалі чисел (NQ+1) корпуса лінійки. «ρ» Під рискою візира прочитати значення «ρ» (ρ=0–90). Примітка: значення кута «ρ» беруть:
- по шкалі тангенсів, якщо: а>b в 1–10 разів
- по шкалі «S і Т», якщо: а>b в 10–100 раз
- по точкам шкали «S і Т», якщо а>b в 100–1000 разів
3. Визначити кут (α). Для чого за таблицею (на зворотній стороні лінійки) по величинам і знакам прирощень координат ΔХ і ΔУ здійснити перехід від кута ρ до дирекційного кута (α). α = 60–00 – 0–90 = 59–10
4. Визначити дальність Д. Для чого, не збиваючи положення візира, під його центральну риску підвести движком значення кута (ρ) по шкалі sin і проти початку (кінця) шкали движка лінійки прочитати значення дальності (Д), маючи на увазі, що
![]()
5. При кутах (ρ=<0–90), дальність (Д) практично рівна значенню більшого прирощення координат. Для отримання дальності більш точно, необхідно проводити визначення дальності по значенню більшого прирощення координат (а) і куту (ρ/2).
Для визначення величини (Δа) на артилерійській логарифмічній лінійці необхідно:
Початок (кінець) шкали движка встановити на значення (b) – меншого прирощення координат по шкалі (NQ+1) корпуса лінійки.
Візир, центральною рискою встановити на значення кута по шкалі tg або «S і Т» і під рискою візира на шкалі чисел (NQ+1) прочитати значенням Δа:.Δа = 19 м; Д=4385+19=4404 м
Примітка:
а) якщо ρ/2 брався по шкалі tg, то 0,1b <Δа < b
б) якщо ρ/2 брався по шкалі «S и Т», то 0,01b <Δа < 0,1b
в) якщо ρ/2 брався по точках шкал S и Т, то 0,001b <Δа < 0,01b
б) обчислення оберненої геодезичної задачі за допомогою обчислювача СТМОбчислення дирекційного кута виробляють діленням меншого прирощення координат на більше по формулам таблиці 2, знімаючи відлік r зі шкали 1 або 2: якщо одне з прирощень більше другого від 1 до 10 раз, то відлік r знімають зі шкали 1, якщо одне з прирощень більше другого від 10 до 100 раз, то відлік r знімають зі шкали 2, а якщо одне з прирощень більше другого від 100 до 1000 раз, то відлік r також знімають зі шкали 2, але зменшують його в 10 разів.
Відстань Д обчислюють діленням більшого прирощення координат на синус більшого кута (r або 15-r).
Приклад: обчислити дирекційний кут a і відстань Д по відомим різницям координат ΔХ=-2448 та ΔY=+2992.
Рішення.
Для обчислення дирекційного кута a:
– встановлюють індекс движка на менше прирощення координат по шкалі 3;
– обертанням рухомого кругу встановлюють напроти індексу движка більше прирощення координат по шкалі 6;
– суміщають індекс движка з нульовим радіусом рухомого круга і напроти індексу движка на основному крузі зчитують зі шкали 1 значення r = 6–54,4;
– в таблиці 2 в рядку зі знаками прирощень координат ![]() відшукують формулу (a=15+r), за якою обчислюють:
відшукують формулу (a=15+r), за якою обчислюють:
a=15–00 + 6–54,4 = 21–54,4
Для обчислення відстані:
– встановлюють індекс движка на більше прирощення (2992) по шкалі 3;
– обертанням рухомого круга встановлюють напроти індексу синус 15 – r (8–46,6) по шкалі 4;
– суміщують індекс движка з нульовим радіусом рухомого круга і по шкалі 3 напроти індексу движка зчитують значення Д=3865.
в) обчислення оберненої геодезичної задачі за допомогою мікрокалькуляторів МК-61, МК-52.Програма для рішення ОГЗ для МК-52:
| Крок | Дія | Код | Крок | Дія | Код | |
| 00 | П®х 3 | 63 | 15 | 6 | 06 | |
| 01 | П®х 1 | 61 | 16 | ¸ | 13 | |
| 02 | – | 11 | 17 | П®х 9 | 69 | |
| 03 | В | OE | 18 | F x³0 | 59 | |
| 04 | F х2 | 22 | 19 | 23 | 23 | |
|
| П®х 4 | 64 | 20 | F | 25 | |
| 06 | П®х 2 | 62 | 21 | БП | 51 | |
| 07 | – | 11 | 22 | 28 | 28 | |
|
| х®П 9 | 49 | 23 | F | 25 | |
| 09 | F х2 | 2 | 24 | /–/ | OL | |
| 10 | + | 10 | 25 | 6 | 06 | |
| 11 | F | 21 | 26 | 0 | 00 | |
| 12 | х®П d | 4Г | 27 | + | 10 | |
| 13 | ¸ | 13 | 28 | х®П а | 4– | |
| 14 | F cos –1 | 1– | 29 | с/п | 50 |
Порядок рішення:
1. Ввести Хвп, натиснути х®П 1, ввести Увп, натиснути
х®П 2, ввести Хц, натиснути х®П 3, ввести Уц, натиснути х®П 4.
2. Після зупинки: зчитати значення a, воно також зберігається в регістрі А.
3. Натиснути П®х d, зчитати значення Д.
Рішення ОГЗ за допомогою калькуляторів з вбудованими функціями переобчислення полярних координат у прямокутні і навпаки здійснюється у наступному порядку:
1. Увімкнути калькулятор.
2. Упевнитись, що калькулятор налаштований для роботи у градусній системі (не у радіанах і не у градах), – у верхній частині індикатора виведено DEG (а не RAD і не GRAD).
3. Ввести Хц, натиснути –, ввести Хвп, натиснути =, х®М.
4. Ввести Уц, натиснути –, ввести Увп, натиснути =.
5. Натиснути b.
6. Натиснути MR, натиснути а.
7. Натиснути 2ndF, а; на дисплеї зчитати значення Д.
8. Натиснути b, ¸, 6, =, на дисплеї зчитати значення дирекційного кута a у поділках кутоміра (великі поділки відокремлені від малих комою), при отриманні від’ємного значення – додати до нього 60: натиснути +, 6, 0, =, зчитати на дисплеї значення a.
6.4 Вирішення трикутника
Вирішення трикутника зводиться до обчислення по двом відомим кутам і відомою однією стороною третього кута – двох інших сторін, або до обчислення по відомим двом сторонам і куту між ними – третьої сторони і двох кутів.
а) Вирішення трикутника за двома кутами і однією стороною.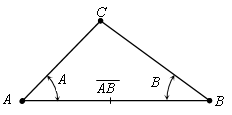 Дано: довжина сторони
Дано: довжина сторони ![]() і кути А і В. Визначити кут С та довжини сторін
і кути А і В. Визначити кут С та довжини сторін ![]() і
і ![]() .
.
В цьому випадку рішення трикутника виконують у такій послідовності.
1. Визначають кут С за формулою:
С =180° – (А + В) або С=30–00 – (А + В)
2. Визначають довжини сторін ![]() і
і ![]() за формулами:
за формулами:
![]() ,
, ![]() .
.
В артилерійській практиці ця задача зустрічається при визначенні координат точки прямою засічкою по виміряним кутам, а також при визначенні координат цілі за допомогою спряженого спостереження.
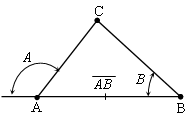 При організації спряженого спостереження з орієнтуванням приладів на пунктах нулями вправо схема вимірювання кутів А і В дещо відрізняється:
При організації спряженого спостереження з орієнтуванням приладів на пунктах нулями вправо схема вимірювання кутів А і В дещо відрізняється:
В цьому випадку кут С визначають за формулою:
С= А – В,
довжини сторін визначаються за вищенаведеними формулами.
Обчислення за допомогою АЛЛ.
Обчислити кут С.
Якщо кут А (В) перевищують 15 – 00 (90°), то, оскільки шкала синусів до 15 – 00, розраховують кут А¢ (В¢) за формулою:
А¢ = 30 – 00 – А (В¢ = 30–00 – В) і використовують його при подальших обчисленнях.
На лінійці встановлюють край шкали движка проти бази Б по шкалі чисел N корпуса лінійки. Потім, не рухаючи движка, риску візира встановлюють напроти кута В на шкалі Sin.
![]()
![]()
![]()
![]() Далі, не збиваючи положення візира, підводять під його риску значення кута С по шкалі Sin (SиT) і проти краю шкали движка по шкалі чисел N корпуса лінійки визначають значення АС. Порядок відстані АС визначають окомірно, приблизними розрахунками, або по величині
Далі, не збиваючи положення візира, підводять під його риску значення кута С по шкалі Sin (SиT) і проти краю шкали движка по шкалі чисел N корпуса лінійки визначають значення АС. Порядок відстані АС визначають окомірно, приблизними розрахунками, або по величині ![]() , маючи на увазі, що коли кут С брався по шкалі Sin, то відстань АС буде у межах від Б¢ до 10*Б¢, а якщо кут С брався по шкалі SиТ, то відстань АС буде у межах від 10*Б¢ до 100*Б¢.
, маючи на увазі, що коли кут С брався по шкалі Sin, то відстань АС буде у межах від Б¢ до 10*Б¢, а якщо кут С брався по шкалі SиТ, то відстань АС буде у межах від 10*Б¢ до 100*Б¢.
Обчислення за допомогою СТМ
Приклад: обчислити за допомогою СТМ відстань АС і ВС, якщо
відомі кути: А =13–74,9; В =12–83,2 і база ВА = 431 м.
1. Обчислити кут С = А–В =13–74,9 – 12–83,2 = 0–91,7.
2. Встановити індекс движка на відлік «431», що відповідає базі ВА по шкалі 3 основного круга.
3. Сумістити відлік С=0–91,7 шкали 5 рухомого круга з індексом движка.
4. Встановити індекс движка на відлік В=12–83,2 по шкалі 4 рухомого круга і напроти індексу движка по шкалі 3 зчитати відлік «348», що відповідає відстані АС = 4380 м.
5. Встановити індекс движка на відлік А=13–74,9 по шкалі 4 рухомого круга і напроти індексу движка по шкалі 3 зчитати відлік «446», що відповідає відстані ВС = 4460 м.
Обчислення за допомогою мікрокалькулятора
1. Увімкнути калькулятор.
2. Упевнитись, що калькулятор налаштований для роботи у градусній системі (не у радіанах і не у градах), – у верхній частині індикатора виведено DEG (а не RAD і не GRAD).
3. Ввести кут С у п.к., натиснути ´, 6, =, sin, х®М.
4. Ввести кут В у п.к., ´, 6, =, sin, ¸, МR, =.
5. Натиснути ´, ввести значення АВ, натиснути =, зчитати на дисплеї значення АС.
6. Ввести кут А у п.к., ´, 6, =, sin, ¸, МR, =.
7. Натиснути ´, ввести значення АВ, натиснути =, зчитати на дисплеї значення ВС.
б) Вирішення трикутника за двома сторонами і кутом між ними.Дано: кут Р та довжини сторін АР і ВР.
Визначити кути А і В та довжину сторони АВ.
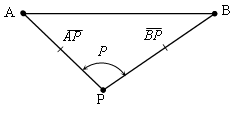 В цьому випадку рішення трикутника виконують у такій послідовності:
В цьому випадку рішення трикутника виконують у такій послідовності:
1. Визначають напівсуму кутів А і В за формулою:
![]()
2. Визначають величину ![]() за формулою:
за формулою:
![]()
3. Визначають напіврізницю кутів А і В за формулою:
![]()
4. Обчислюють кути А і В за формулами:
![]() ,
, ![]()
5. Обчислюють довжину сторони АВ за формулою:
![]() , або
, або ![]()
Абсолютні висоти точок, що прив’язуються, визначають по карті інтерполюванням окомірно відносно найближчих горизонталей. Висоти вогневих позицій, пунктів і постів артилерійської розвідки визначають по карті при крутизні схилу не більше 6°.
Якщо крутизна схилу більше за 6°, то висоту визначають за допомогою приладів (теодоліту або бусолі) від пункту геодезичної мережі або контурної точки, розташованої на схилі, крутизна якого на перевищує 6°.
При цьому висоту точки визначають за формулою:
![]() ,
,
де ![]() – висота вихідної (контурної) точки;
– висота вихідної (контурної) точки;
![]() – перевищення точки, що прив’язується відносно вихідної (контурної).
– перевищення точки, що прив’язується відносно вихідної (контурної).
Величину![]() визначають за формулою:
визначають за формулою:
![]() , або
, або ![]()
де Д – відстань між вихідною точкою і точкою, що прив’язується (визначається по карті або за допомогою далекоміра), м;
![]() – кут місця при спостереженні з вихідної точки на точку, що прив’язується; він дорівнює куту місця цілі з точки що прив’язується на вихідну точку, взятому з протилежним знаком:
– кут місця при спостереженні з вихідної точки на точку, що прив’язується; він дорівнює куту місця цілі з точки що прив’язується на вихідну точку, взятому з протилежним знаком:
![]() ,
,![]()
Першою формулою користуються при визначенні відстані Д по карті (горизонтальної дальності), а другою – при визначенні відстані ДН за допомогою далекоміра (нахиленої дальності).
Знак перевищення![]() відповідає знаку кута місця
відповідає знаку кута місця ![]() .
.
При проведенні приблизних розрахунків для визначення перевищення![]() при незначному значенні
при незначному значенні![]() (до 1–00) можна скористатися формулою тисячних з обов’язковим урахуванням 5%-ної поправки:
(до 1–00) можна скористатися формулою тисячних з обов’язковим урахуванням 5%-ної поправки:
![]()
Помилка наближення при застосуванні цієї формули складе -0,1%, тобто при дальності Д » 1000 м вона буде складати до 0,1 м.
При обчисленнях за наближеною формулою при e » 2–00 помилка складе 1%, що при дальності Д»1000 м приведе до неприпустимих помилок при обчисленні абсолютної висоти визначаємої точки.
Похожие работы
... від ЗМУ і організує їх виконання. СОБ зобов'язаний в будь-якій обстановці організувати безпосередню охорону і самооборону своїх підрозділів. Зміст і послідовність роботи СОБ артилерійської батареї при підготовці вогневих взводів батареї до бойових дій в обороні На карті (якщо мало часу) вибирається місце майбутньої ВП. Після під'їзду до місця майбутньої ВП на відстань 100-200 м СОБ командує: ...
... . Аеромобільні дії це – форма дій аеромобільних військ в ході ведення спеціальних, антитерористичних та миротворчих операцій змістом яких є дії аеромобільних підрозділів, частин та з'єднань у взаємодії з підрозділами, частинами та з'єднаннями армійської авіації. Склад сил і засобів, що залучаються до ведення десантно-штурмових та аеромобільних дій, залежить від мети, завдань, масштабів дій та ...
0 комментариев