Навигация
Выбор рода тока и напряжения двигателя
23564
знака
3
таблицы
4
изображения
1. Выбор рода тока и напряжения двигателя
В основу этого выбора положены экономические соображения. Электродвигатели имеют высокую стоимость, т.к. являются сложными изделиями, в которых используются ценные электротехнические материалы, рассчитанные на длительный срок службы (20 лет). Поэтому выбор начинают с «примерки» пригодности для привода самых простых и дешёвых двигателей – трёхфазных асинхронных с КЗ - ротором и до самых сложных и дорогих – двигателей постоянного тока.
По назначению выбираем тип двигателя – постоянного тока [1, стр.448]. Выбор рода тока электродвигателя определяют и выбор его номинального напряжения, которое обычно берут равным напряжению источника электропитания цеха, завода, стройплощадки (чаще всего это трёхфазная сеть с основным напряжением 380/220 В). Повышение или понижение напряжения для двигателей с помощью трансформаторов, применение выпрямителей для двигателей постоянного тока приводит к увеличению затрат на электрооборудование.
2. Выбор номинальной скорости двигателя
Высокая скорость электродвигателя позволяет уменьшить его габаритные размеры, массу и стоимость. Для согласования скоростей двигателя и механизма ставят редуктор, что удорожает электропривод. Вопрос о рациональном соотношении двигатель – редуктор решается конструктором при проектировании механизма.
3. Выбор конструктивного исполнения двигателя
Конструктивное исполнение современных серий электродвигателей учитывает три фактора: защиту от воздействия окружающей среды, обеспечение охлаждения и способ монтажа.
По способу защиты от воздействия окружающей среды электродвигатели изготавливают в защищённом, закрытом и взрывонепроницаемом исполнении.
Защищённые от попадания мелких предметов и капель двигатели предназначены для работы в сухих непыльных местах.
Закрытые двигатели устанавливают в помещениях с повышенной влажностью, атмосферой, загрязненной пылью с металлическими включениями, парами масла или
керосина.
Взрывозащищенные двигатели имеют корпус, способный выдерживать взрыв газа внутри машины и исключающий при этом выброс пламени в окружающую среду.
По способу охлаждения различают двигатели с естественным охлаждением, самовентиляцией внутренней или наружной и посторонним продувом (принудительным).
По способу монтажа имеются двигатели с горизонтальным расположением вала и станиной на лапах, с вертикальным расположением вала и фланцем на нижнем щите и т.д. Выбираемый двигатель должен иметь тот же способ установки, крепления и соединения с механизмом, что и заменяемый.
4. Выбор двигателя по мощности
Завершающим этапом является определение номинальной мощности двигателя и выбор по ней в каталоге подходящего двигателя. Однако номинальную мощность просто определить только при длительной работе с постоянной нагрузкой, которую и принимают за номинальную. В подавляющем большинстве случаев момент, мощность и ток двигателя изменяются во времени. Нагрузочные диаграммы двигателей многих механизмов включают периоды работы и пауз. При подобной переменной нагрузки двигатель должен условиям допустимого нагрева, обладать максимальным моментом, достаточным для преодоления возможных кратковременных перегрузок и при пуске с большой нагрузкой иметь избыточный пусковой момент для обеспечения разгона привода.
Максимальный момент, характеризующий перегрузочную способность, а так же пусковой момент определяются электромагнитными свойствами двигателя.
5. Расчёт мощности и выбор электродвигателя для длительного режима работы
Определение номинальной мощности двигателя для работы в длительном режиме с переменной нагрузкой сводится к подсчёту мощности Рс исполнительного механизма, приведённой к валу двигателя (с учётом к.п.д. передач, редукторов и т. д.). По полученной мощности Р в каталогах выбирают двигатель с номинальной мощностью РНОМ>Рс
![]()
k=1.1―1.3 , где k - коэффициент запаса.
По [2] выбираем двигатель переменного тока марки 4ПФ132L.
Таблица 2. Справочные данные электродвигателя переменного тока марки
| Номинальная мощность, кВт | 23.6 |
| Напряжение на якоре, В | 440 |
| КПД, % | 83 |
| Частота вращения, об/мин | 1400 |
Электродвигатели постоянного тока часто являются исполнительными звеньями систем автоматического регулирования, а специальные генераторы используются как усилители электрических сигналов управления и как тахогенераторы – датчики частоты вращения.
Наиболее распространены машины общепромышленного применения серии П, выпускаемые как двигатели или как генераторы на мощности 0,15 – 200 кВт, частоты вращения 2870 – 550 об/мин (более мощные – тихоходные), напряжения 110 – 460 В.
При целом ряде преимуществ машины постоянного тока имеют существенный недостаток, связанный с работой так называемого щеточноколлекторного узла. При определённых неблагоприятных условиях щётки могут искрить, что снижает надёжность работы и требует надзора и ухода за машиной.
6. Устройство и принцип действия двигателя постоянного тока 6.1. Электромагнитная схема
В машине постоянного тока создается неподвижное магнитное поле полюсов статора, в котором вращается ротор с расположенными на нем проводниками, образующими рабочую обмотку.
Рассмотрим подробнее схему устройства машины постоянного тока. На рис. 2 показана магнитная система двухполюсной машины и картина поля в ней. Основные полюсы укреплены на внутренней поверхности полого стального цилиндра — станины, являющейся частью магнитопровода. На полюсах находятся катушки-, соединенные последовательно и образующие обмотку возбуждения. Магнитное поле создается током возбуждения Iв в катушках (реже постоянными магнитами). Цепь возбуждения — это вспомогательная цепь машины. Картина магнитного поля изображена на рис. 2 магнитными линиями.
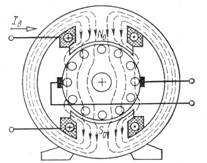
Рис. 2. Магнитное поле машины
Магнитная система и поле машины симметричны относительно продольных осей полюсов N0—S0. Линии, проходящие посередине между смежными полюсами, называют поперечными магнитными осями, а их следы на поверхности якоря — геометрическими нейтралями. Ротор с рабочей обмоткой в машинах постоянного тока называют якорем. Для равномерного распределения магнитной индукции в зазоре между полюсами и якорем служат полюсные наконечники, как бы охватывающие якорь. Обмотка якоря состоит из уложенных на поверхности (в пазах) ротора «активных» проводников, соединенных в витки (секции, см. рис. 10) так, что она всегда представляет собой замкнутый контур.
Поскольку обмотка якоря вращается, соединение с ее внешней цепью осуществляется скользящим контактом с помощью неподвижных электрографитовых щеток. Цепь якоря — это главная цепь машины.
6.2. Получение постоянной э. д. с. якоряРассмотрим получение постоянного напряжения между щетками. Для этого изобразим модель якоря между двумя полюсами машины (рис. 3).
Пусть машина используется в качестве генератора и якорь приводится во вращение с постоянной угловой скоростью Ω в указанном на рис. 3 направлении, а внешняя цепь отключена. В проводниках, лежащих в пазах на поверхности и пересекающих линии нормальной к ней составляющей магнитной индукции В в зазоре между полюсом и якорем, при вращении якоря наводятся э. д. с.
e = Blv,
где l — длина проводника (или якоря); ν — линейная (окружная) скорость проводников.
Эти проводники называют активными.
Соединительные проводники на торцовых поверхностях якоря (лобовые части, см. рис. 9 и 10) не пересекают магнитных линий и в них э. д. с, не наводятся.
Применив известное правило правой руки для определения направления э. д. с. в активных проводниках, убедимся, что во всех проводниках, движущихся под одноименными полюсами, э. д. с. направлены одинаково; (крестики или точки). Под северным и южным полюсами направления э. д. с. противоположны. В проводниках, проходящих геометрические нейтрали, э. д. с. не наводятся, так как здесь B = 0. Таким образом, при вращении якоря в его проводниках наводятся переменные э.д.с.
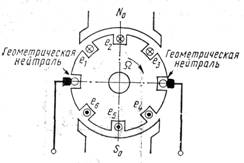
Рис. 3. Модель якоря двухполюсной машины
Как указывалось, обмотка якоря представляет собой замкнутый контур (это легко видеть на изображении простейшей обмотки якоря — бесконечной спирали на тороиде рис. 4, которая применялась в первых машинах).
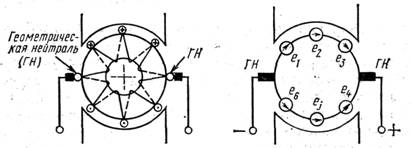
Рис. 4. Простейшая замкнутая обмотка якоря и ее схема
Однако ток в контуре не возникает, так как алгебраическая сумма мгновенных значений э. д. с. е всех последовательно соединенных проводников обмотки равна нулю: обмотка выполняется с равным числом проводников под каждым полюсом, магнитные потоки полюсов одинаковы, полярность полюсов чередуется.
Если установить неподвижные электрографитовые щетки для осуществления скользящего контакту с проводниками, проходящими геометрические нейтрали (см. рис. 3), то между щетками всегда будут находиться проводники обмотки с одинаково направленными э. д. с. е, сумма которых максимальна и постоянна (при сдвиге щеток эта сумма уменьшается).
В действительности щетки касаются не проводников на поверхности якоря, а соединенных с ними соответствующих пластин коллектора (см. рис. 5 и 10). Коллектор — цилиндр, набранный из медных пластин, изолированных одна от другой прокладками, и закрепленный на валу. Щетки устанавливают так, чтобы они касались пластин коллектора, соединенных с проводниками, проходящими геометрические нейтрали.
В результате установки щеток и соединения их с внешней цепью обмотка якоря по отношению к его зажимам оказывается разделенной на параллельно соединенные ветви с одинаковыми э. д. с. Е и сопротивлениями Rа. Из схематически изображенной на рис. 6, а обмотки якоря видно, что э. д. с. якоря Е равна э. д. с. любой из параллельно соединенных ветвей. Внутреннее сопротивление якоря Rя — это эквивалентное сопротивление параллельно соединенных ветвей обмотки. Обычно оно мало (от долей ома у крупных машин до единиц ом у небольших). Если к зажимам якоря генератора присоединить внешнюю электрическую цепь, то э. д. с. якоря создаст в цепи ток якоря (ток нагрузки, рабочий ток). В двигателе ток создается внешним источником и в якоре делится на токи параллельных ветвей. Направление тока во всех проводниках одной параллельной ветви одинаковое, противоположное направлению токов в другой ветви.
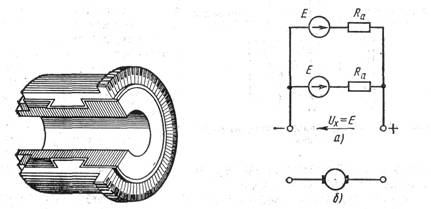
Рис. 5. Коллектор (разрез) Рис. 6. Схема замещения обмотки якоря с двумя параллельными ветвями (а), изображение якоря по ГОСТ (б)
Обычно машина постоянного тока выполняется многополюсной (см, рис. 7 и 8). При этом возрастает число пар щеток и параллельных ветвей якоря.
На электрических схемах якорь машины постоянного тока изображают (ГОСТ 2.756—76) условно в виде окружности с двумя диаметрально расположенными щетками (рис. 6, б), а обмотку возбуждения — как индуктивный элемент.
6.3. Конструкция современной машины постоянного токаВыше была рассмотрена двухполюсная модель машины постоянного тока. Современные машины имеют не менее четырех полюсов. На рис. 7 показаны основные элементы конструкции четырехполюсной машины, а на рис. 8 — разрез ее магнитной системы.
Станина (6 на рис. 7) представляет собой полый стальной цилиндр, внутри которого укреплены основные полюсы 5 магнитной системы с катушками обмотки возбуждения. Между основными находятся узкие добавочные полюсы 4 со своими катушками
Станину машины отливают или свертывают в цилиндр из толстой листовой стали и сваривают по шву. Полюсы отковывают из мягкой стали или набирают из стальных пластин. К торцам станины прикреплены подшипниковые щиты 1 с подшипниками, в которых вращается вал якоря 3. На щите со стороны коллектора установлены щеткодержатели со щетками 2. Якорь представляет собой стальной барабан, (рис. 9,
Для уменьшения потерь от вихревых токов при перемагничивании его набирают из дисков электротехнической стали толщиной 0,5 мм (рис. 9, в). Барабанная обмотка отличается от спиральной обмотки на тороиде тем, что все проводники укладываются витками на поверхности барабана и являются активными. При этом стороны витка располагаются под разноименными полюсами так, что э. д. с. в них складывается. На рис. 10 схематически показана укладка витков обмотки в пазы и их соединение с коллекторными пластинами. Проводники (витки) обмотки, заключенные между двумя ближайшими пластинами, образуют секцию обмотки (на рис. 10 показаны только две секции). Обмотка имеет несколько десятков секций, столько же и коллекторных пластин.
На корпусе машины имеется коробка с зажимами, куда выведены концы обмотки якоря и обмотки возбуждения. На паспортном щитке указываются номинальные параметры машины: отдаваемая электрическая мощность генератора или механическая мощность двигателя, напряжение, ток, частота вращения, способ возбуждения, к. п. д., масса, номер машины и марка завода-изготовителя.
Похожие работы
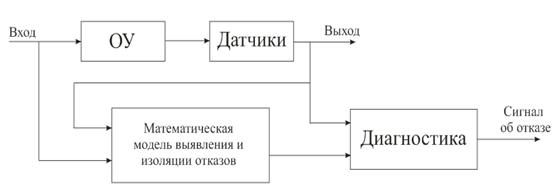
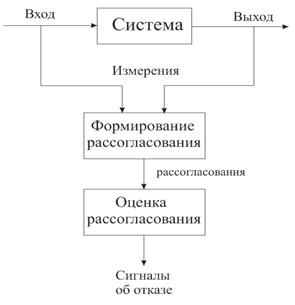
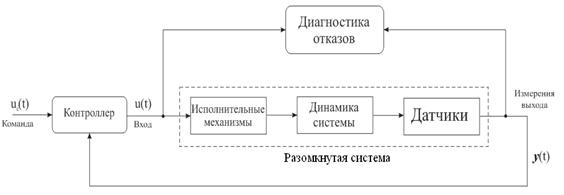

... сети могут быть использованы как классификаторы для разделения образцов рассогласований и формирования сигналов тревог. Таким образом, они могут выявлять и изолировать отказы. 3. Диагностика отказов системы регулирования уровня жидкости в баке 3.1. Постановка задачи Реализацию описанного выше метода диагностики отказов, основанного на моделях будем выполнять применительно к системе ...
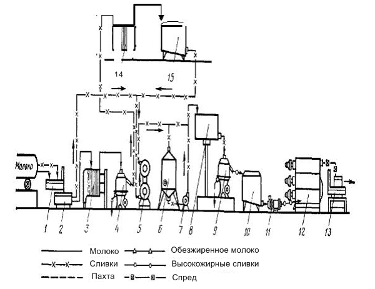
... 13 — стол и весы; 14 — охладитель пластинчатый; 15 — емкость для резервирования сливок. 3. Сравнительная характеристика технологического оборудования Спред вырабатывается с помощью аналогичного оборудования что и сливочное масло. Оборудование для производства сливочного масла делится на оборудование для подготовительных операций и оборудование для выработки сливочного масла. Подготовительные ...
... от переподъемов, нулевую и максимальную защиты. - предусматривать остановку сосудов в промежуточных точках ствола. световую сигнализацию о режимах работы подъемной установки в здании подъемной машины, у оператора загрузочного устройства, у диспетчера. Современные регулируемые электроприводы постоянного тока для автоматизированных подъемных установок выполняют на основе двигателей постоянного ...
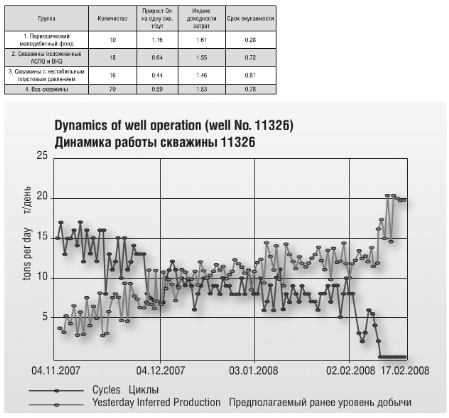
... достоверность диагностики режима работы установки и выявления неисправностей. Кроме перечисленных выше, станция управления АСУС-02 обладает следующими возможностями: - точная автоматизированная балансировка станка-качалки; - подсчет потребленной электроэнергии; - определение производительности скважинной установки по динамограмме; - оценка динамики изменения дебита скважины; - часовой (за ...
0 комментариев