Навигация
Формирование тактовых импульсов
12067
знаков
0
таблиц
10
изображений
2.2 Формирование тактовых импульсов
Источником тактовых импульсов в микроконтроллере LPC2104 может быть:
– внешний резистор
– высокочастотный кварцевый резонатор
– внешний источник тактовых импульсов
В данном разрабатываемом устройстве наиболее предпочтительным режимом работы генератора является применение внешнего кварцевого резонатора подключаемого к контактам X1 и X1 Это стабильный генератор с точной выдержкой временных интервалов тактовой частоты которая необходима для точной обработки данных полученных с оптопар и выдержки точных интервалов в USART0.
На рисунке 5 приведена схема тактирования.
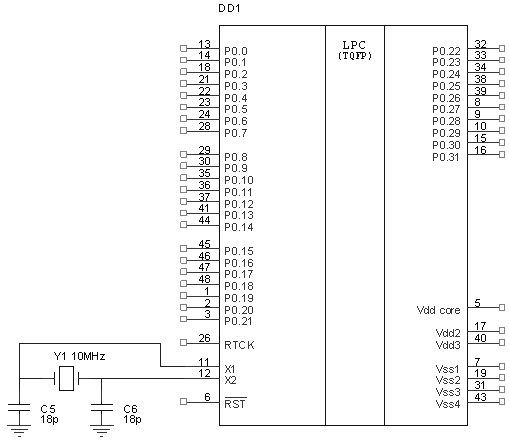
Рисунок 5 – Схема тактирования.
2.3 Схема сброса
На рисунке 6 приведена аппаратная схема сброса по включению питания. Данная схема необходима для первичной инициализации аппаратуры микроконтроллера.
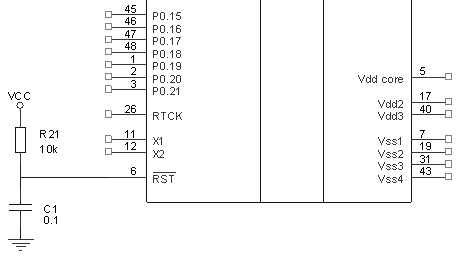
Рисунок 6 – Аппаратная схема сброса по включению питания
2.4 Схемы входных и выходных устройств
Данное устройство считывает данные с 10-ти оптопар. Применим оптрон АОД130А. Оптопара диодная, состоящая из излучателя и кремниевого фотоприёмника, изготовленных по эпитаксиальной технологии, в пластмассовом корпусе, предназначены для использования в качестве элементов гальванической развязки в высоковольтной электротехнической и радиоэлектронной аппаратуре.
Характеристик датчика:
- Входное напряжение (Iвх = 10 мА) 1,5В
- Время нарастания выходного сигнала 100 нс
- Время спада выходного сигнала 100 нс
- Сопротивление изоляции 1011 Ом
Схема включения оптрона приведена на рисунке 7.
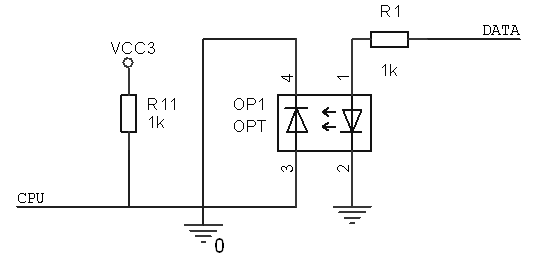
Рисунок 7 – Схема включения оптрона
Обмен данными осуществляется по RS 485 интерфейсу. Для данной КС применим микросхему MAX3362. ИС MAX3362 представляют собой высокоскоростные трансиверы для коммуникационных приложений RS-485, содержащие по одному драйверу и одному приемнику. Данные ИС имеют отказоустойчивую архитектуру, гарантирующую высокое логическое состояние на выходе приемника при разомкнутых, или замкнутых на корпус, входах приемника. Это означает, что выход приемника имеет высокое логическое состояние при отключении всех передатчиков (высокоимпедансное состояние) на согласованной шине. С низким напряжением питания. На рисунке 8 приведен MAX3362.
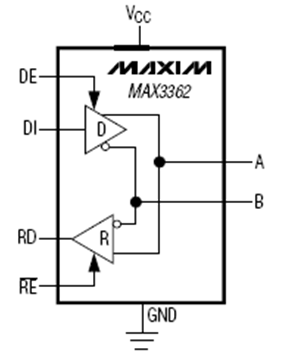
Рисунок 9 – MAX3362
2.5 Схема стабилизатора напряжения
Источник питания микроконтроллера построен на литиевой 3V батарее. Для формирования напряжения питания ядра процессора (1.8V) применим параметрический стабилизатор на стабилитроне. На рисунке 9 приведена схема питания.
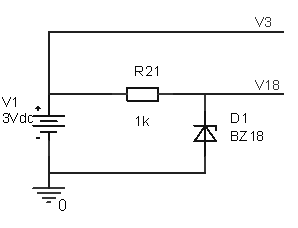
Рисунок 9 – Схема питания микроконтроллера.
3. Проектирование программного обеспечения микропроцессора
3.1 Проектирование модуля инициализации микроконтроллера
Для инициализации данного устройства необходимо выделить память для глобальных переменных, и провести инициализацию портов, таймеров и USART, RTC.
3.2 Проектирование процедур обработки прерываний
Данное устройство не требует написания программы с обработкой прерываний. Это связанно с линейностью выполнения алгоритма опроса датчиков и обмена данными по RS485.
3.3 Проектирование процедур обработки информации
Оптопара имеет прямоугольные сигналы на выходе. И для измерения каких либо величин необходимо измерение длительности активного и неактивного состояния датчика. И в зависимости от состояния каждой из 10 оптопар формировать соответствующую посылку.
3.4 Проектирование процедур вывода информации
C помощью встроенных RTC формируем временны метки к измеренным данным.
Вывод информации осуществляется с помощью дифференциального интерфейса обмена данными RS 485. Протокол – RS232. Встроенный аппаратный модуль LPC2000.
3.5 Проектирование процедуры Main()
Процедура Main это главная процедура программы с которой начинается выполнение. В данной процедуре необходимо вызвать процедуру инициализации, а затем необходимо перейти в бесконечный цикл опроса датчиков, формирование посылки, передача данных. На рисунке 10 приведен общий алгоритм работы устройства.
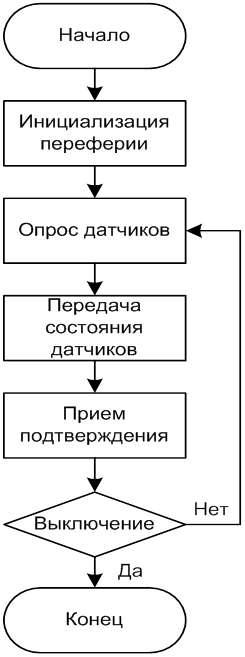
Рисунок 10 – Общий алгоритм работы устройства
4 Листинг программы
#include <limits.h>
#include "LPC210x.h"
#include "global.h"
#include "uart.h"
//! enable and initialize the uart
void uart0Init(uint16_t baud, uint8_t mode, uint8_t fifomode)
{
// set port pins for UART0
PINSEL0 = (PINSEL0 & ~U0_PINMASK) | U0_PINSEL;
U0IER = 0x00; // disable all interrupts
U0IIR; // clear interrupt ID
U0RBR; // clear receive register
U0LSR; // clear line status register
// set the baudrate
U0LCR = ULCR_DLAB_ENABLE; // select divisor latches
U0DLL = (uint8_t)baud; // set for baud low byte
U0DLM = (uint8_t)(baud >> 8); // set for baud high byte
// set the number of characters and other
// user specified operating parameters
U0LCR = (mode & ~ULCR_DLAB_ENABLE);
U0FCR = fifomode;
}
int uart0SendByte(int data)
{
while(!(U0LSR & ULSR_THRE)) // wait for TX buffer to empty
continue; // also either WDOG() or swap()
U0THR = (uint8_t)data;
return (uint8_t)data;
}
int uart0GetByte(void)
{
if(U0LSR & ULSR_RDR) // check if character is available
return U0RBR; // return character
return -1;
}
void uart1Init(uint16_t baud, uint8_t mode, uint8_t fifomode)
{
// set port pins for UART1
PINSEL0 = (PINSEL0 & ~U1_PINMASK) | U1_PINSEL;
U1IER = 0x00; // disable all interrupts
U1IIR; // clear interrupt ID
U1RBR; // clear receive register
U1LSR; // clear line status register
// set the baudrate
U1LCR = ULCR_DLAB_ENABLE; // select divisor latches
U1DLL = (uint8_t)baud; // set for baud low byte
U1DLM = (uint8_t)(baud >> 8); // set for baud high byte
// set the number of characters and other
// user specified operating parameters
U1LCR = (mode & ~ULCR_DLAB_ENABLE);
U1FCR = fifomode;
}
int uart1SendByte(int data)
{
while(!(U1LSR & ULSR_THRE)) // wait for TX buffer to empty
continue; // also either WDOG() or swap()
U1THR = (uint8_t)data;
return (uint8_t)data;
}
int uart1GetByte(void)
{
if(U1LSR & ULSR_RDR) // check if character is available
return U1RBR; // return character
return -1;
}
5 Рекомендации по разработке программных и аппаратных диагностических средств для проверки работоспособности устройства
Для диагностики работоспособности данного устройства можно использовать как аппаратные, так и программные средства. Данные средства должны иметь возможность производить отладку с помощью модуля Trace Macrocell.
А так же существует возможность самотестирования работоспособности оптопары, при подаче тестовых сигналов на вход оптопары.
Заключение
В данном курсовом проекте было разработано устройство считывания данных с оптопар и передачи данных по RS485. Встроены часы реального времени позволяют ставить временные метки для измеренных данных.
Использование внешнего кварцевого генератора обеспечивает высокую стабильность измерения временных интервалов поступающих от оптопары.
В ходе проектирования устройства были рассмотрены основные принципы построения устройств на микроконтроллерах LPC2000 от Philips. А так же изучены аппаратные возможности данных микроконтроллеров.
Научились по описаниям работы или временным диаграммам функционирования устройств составлять алгоритмы тех или иных блоков программ.
В целом по разработанному курсовому проекту можно заметить, что использование микроконтроллеров LPC2000 позволяет строить недорогие и производительные микроконтроллерные системы не использую внешнее периферийное оборудование (аналоговый компаратор, аппаратный тайме и др.).
Похожие работы
... автоматизации На основании эскизного проекта и разработанной функциональной схемы автоматизации производится выбор технических средств для проектируемой системы управления процессом подготовки шихты. Правильный выбор технических средств автоматизации является непременным условием эффективного и надёжного функционирования системы, залогом её минимальной стоимости и безопасности для персонала и ...
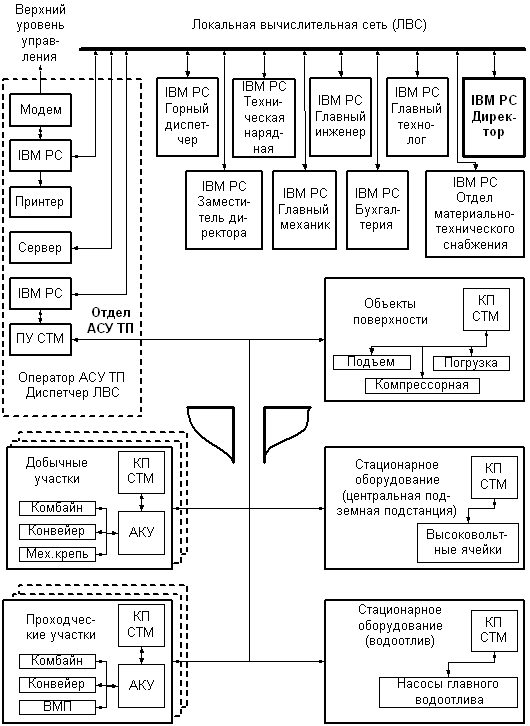
... (УВТ) и другие специализированные устройства; средства для использования информации: автоматические регуляторы, исполнительные механизмы (ИМ). Рис.1. Обобщенная структура системы управления Структура современной системы управления производством на примере системы управления угольной шахты приведена на рис. 2. Рис.2. Структура современной системы управления производством на примере ...
... питания, блока сопряжения с компьютером, компьютер, индикатор. Блок – схема радиоприемника представлена на рисунке.2.1. Рисунок 2.1 - Структурная схема дистанционного комплекса контроля функционального состояния 1 – приемник; 2 – дешифратора; 3 – детектора; 4 – усилителя; 5 – усилителя вертикального отклонения; 6 – электронно-лучевой трубки; 7 – задающего генератора ...

... и на некоторой глубине z связаны между собой приблизительно экспоненциальной зависимостью где - коэффициент затухания (затухание на единицу длины). Затухание ультразвуковых колебаний зависит от вида ткани и частоты. Принято считать, что оно растет пропорционально частоте. УЗ сканеры работают на высоких частотах – от 3 до 15 МГц, поэтому затухание УЗ колебаний имеет большую величину. В ...
0 комментариев