Навигация
2.3 Схема сброса
Схема сброса должна формировать импульс логического нуля для подачи его на инверсный вывод сброса микроконтроллера RESET. Это импульс должен формироваться, например, при нажатии на кнопку сброса устройства или при переключении ключа.
Для такой схемы подходит включение транзистора, показанное на рисунке 2.2. Когда ключ открыт, транзистор находится в закрытом состоянии и на вход RESET AVR поступает сигнал логической единицы. Когда ключ замыкается, транзистор открывается и на вход сброса устройства поступает сигнал логического нуля.
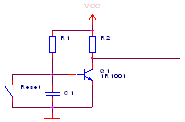
Рис. 2.3 – Схема формирования импульса сброса
2.4 Схема стабилизатора напряжения
В качестве стабилизатора напряжения в нашем устройстве используется импульсный понижающий стабилизатор LM2574, который обладает следующими характеристиками:
• входное напряжение - до 60 V (для HV версий)
• выходное напряжение - 3.3 V, 5 V, 12 V, 15V
• выходной ток - 0.5 А
Схема включения стабилизатора для преобразования +10 V - +5 V приведена на рисунке 2.4.
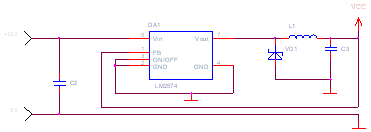
Рис. 2.4 - Схема включения стабилизатора напряжения LM2574
2.5 Входные и выходные устройства
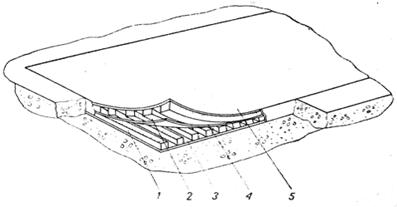
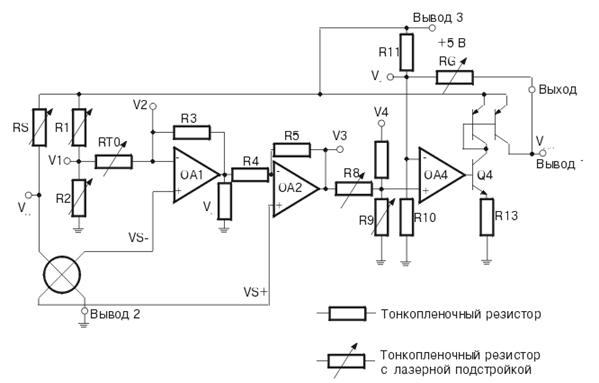
Входными устройствами в данном проекте являются весовой индикатор WE2108, который имеет вывод превышения заданного уровня срабатывания и датчики положения заслонки бункера (открыт/закрыт). На выводе превышения заданного уровня срабатывания формируется уровень лог. 0, когда превышен заданный вес, предварительно занесенный в память прибора WE2108.
Весовой индикатор WE2108 является измерительным усилителем для подключения 4х датчиков веса. Сигнал датчиков веса усиливается и преобразуется прибором в цифровую форму и отображается на встроенном дисплее. WE2108 является полностью самостоятельным устройством со встроенным микропроцессором и позволяет выполнять широкий спектр задач связанных с измерением веса. Допустимое напряжение питания для прибора составляет от +10В до +35В постоянного тока.
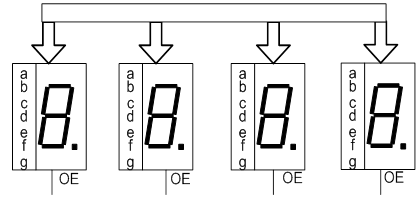
Выходные устройства – сигналы управления задвижками бункера и транспортером выдаваемые через порты микроконтроллера ATmega16. Также предусмотрена индикация количества отгрузок на 4х разрядном 7-ми сегментном индикаторе.
3. Разработка программного обеспечения микроконтроллера
3.1 Разработка алгоритма программы
Программа должна выполнять следующие функции:
• обработка нажатия кнопки Пуск;
• управление заслонками бункера и работой транспортера;
• обработку сигнала превышения заданного веса;
• выдачу количества отгрузок на 4х разрядный 7-ми сегментный индикатор.
Выполнение этих операций происходит по следующему алгоритму:
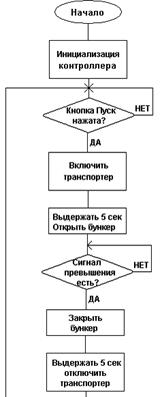

Рис. 3.1 – Алгоритм программы.
3.2 Проектирование функций микроконтроллера
Процедура инициализации микроконтроллера должна состоять из процедур или операторов инициализации всех узлов самого микроконтроллера и всех периферийных устройств, и установить все начальные значения для их регистров..
Порт А работает на вывод данных, а порт С работает на прием сигналов. Поэтому при их настройке необходимо в соответствующие биты регистров DDRx, которые управляют направлением передачи данных, записать значение 0 или 1, тем самым, настроив их выводы на прием или передачу данных.
3.2.1 Инициализация таймера/счетчика0
8-разрядный таймер/счетчик может получать импульсы тактовой частоты – СК с предварительного делителя (СК/8, СК/64, СК/8256, СК/1024), импульсы с внешнего вывода или быть остановлен соответствующими установками регистра TCCR0. Флаг переполнения таймера находится в регистре TIFR. Разрешение и запрещение прерываний от таймера управляется регистром TIMSK.
SREG – регистр состояния
| 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| I | T | H | S | V | N | Z | C |
| R/W | R/W | R/W | R/W | R/W | R/W | R/W | R/W |
Рис 3.2 - регистр состояния SREG
I – общее разрешение прерываний, 1 – разрешено.
Т – хранение копируемого бита.
Н – флаг половинного переноса.
S – бит знака.
V – флаг переполнения дополнения до двух.
N – флаг отрицательного результата.
Z – флаг нулевого результата.
C – флаг переноса.
TCCR0 - данный регистр служит для управления частотой и источником тактовых импульсов таймера (см. таблицу)
| 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| - | - | - | - | - | CS02 | CS01 | CS00 |
| R | R | R | R | R | R/W | R/W | R/W |
Рис. 3.3 – Регистр управления таймером/счетчиком0 TCCR0
Биты 7…3 зарезервированы и всегда читаются как 0.
Биты 2, 1, 0 – выбор коэффициента деления предварительного делителя.
| CS02 | CS01 | CS00 | Значение |
| 0 | 0 | 0 | Стоп |
| 0 | 0 | 1 | СК |
| 0 | 1 | 0 | СК/8 |
| 0 | 1 | 1 | СК/64 |
| 1 | 0 | 0 | СК/256 |
| 1 | 0 | 1 | СК/1024 |
| 1 | 1 | 0 | Вн. Сигнал Т0, нар. фронт |
| 1 | 1 | 1 | Вн. Сигнал Т0, спад. фронт |
Рис. 3.4–Выбор коэффициента деления предварительного делителя.
TCNT0 – данный регистр служит для загрузки и считывания показаний счетчика/таймера0.
| 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| MSB | LSB | ||||||
| R/W | R/W | R/W | R/W | R/W | R/W | R/W | R/W |
Рис. 3.5 – регистр текущего значения счетчика TCNT0
TIMSK – данный регистр служит для установки и сброса флагов разрешения работы прерываний таймеров.
| 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| OCIE2 | TOIE2 | TICIE1 | OCIE1A | OCIE1B | TOIE1 | OCIE0 | TOIE0 |
| R/W | R/W | R/W | R/W | R/W | R/W | R/W | R/W |
Рис. 3.6 – регистр масок прерываний таймеров
TOIE1 – разрешение прерывания по переполнению таймера/счетчика 0
OCIE1A - разрешение прерывания по совпадению таймера/счетчика 1
TIFR - данный регистр содержит флаги прерываний таймеров
| 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| OCF2 | TOV2 | ICF1 | OCF1A | OCF1B | TOV1 | OCF0 | TOV0 |
| R/W | R/W | R/W | R/W | R/W | R/W | R/W | R/W |
Рис. 3.7 – регистр флагов прерываний таймеров.
TOV1 – флаг переполнения таймера/счетчика 0. 1 – произошло переполнение
OCF1A – флаг выхода совпадения 1А. 1 – произошло совпадение значения таймера/счетчика 1 и данных в регистре OCR1A.
Похожие работы
... плана ФЭ. Большое разнообразие моделей РК приводит к необходимости использования разнообразных способов и технических средств для измерения их параметров. Как правило, статические и динамические параметры РК измеряют на разных технологических установках. Методы построения средств измерения для идентификации моделей РК могут быть сведены к следующим принципам, учитывающим особенности подключения ...
... —к «массе». Качество отработки элементов вождения по трудным грунтам зависит от наличия и состояния цепей противоскольжения, трековых дорожек, матов и средств самовытаскивания 4. РАЗРАБОТКА КОНСТРУКЦИИ ДУБЛИРУЮЩЕГО УСТРОЙСТВА УПРАВЛЕНИЯ 4.1. ОПРЕДЕЛЕНИЕ РАСЧЕТНОЙ НАГРУЗКИ НА ВАЛ, ВОЗВРАТНЫЕ ПРУЖИНЫ И ПЕДАЛИ. Номинальное усилие на дополнительные педали тормоза и сцепления будет находиться в ...

... , что позволяет осуществлять монтаж этих весов без использования большегрузных кранов. Платформы могут быть снабжены ограничительными барьерами для предотвращения случайного съезда автотранспорта с весов. В автомобильных колейных весах может быть предусмотрен доступ для очистки конструктивных засоров без демонтажа весовой платформы [5, с. 11]. Также важным является то, что колейные автомобильные ...
... их на соответствующий порт, также необходимо вывести десятичную точку P2.7. Заключение В результате проделанной работы были разработаны электронные весы с диапазоном измерения от 0 до 250 килограмм, с точностью измерения 500 грамм, с микропроцессорным управлением. Точность измерения не зависит от положения объекта на весах. Габаритные размеры весов 5000x5000 мм. Электронные весы работают от ...
0 комментариев