Навигация
Синтез системи керування електроприводом технологічної установки
22693
знака
3
таблицы
0
изображений
Міністерство освіти і науки України
Полтавський державний технічний університет імені Юрія Кондратюка
Курсовий проект з дисципліни:
Системи керування електроприводамиТема:
Синтез системи керування електроприводом технологічної установки
Зміст
Вступ
Вихідні дані
1. Синтез системи керування методом циклограм
2. Опис роботи системи
3. Розрахунок та побудова механічних характеристик двохшвидкісного асинхронного двигуна
4. Розрахунок та вибір елементів схеми
Заключення
Література
Вступ
Електропривод представляє собою електромагнітну систему перетворення електричної енергії в механічну. Керування електроприводом – це організація процесу перетворення енергії, що гарантує в статичних і динамічних режимах роботи потрібні режими роботи технологічних механізмів.
Керування електроприводом ручне, якщо воно виконується за допомогою простих комутаційних пристроїв, на які безпосередньо діє оператор.
Автоматичне керування виконується без безпосередньої участі оператора, який в даному випадку може виконати команду “ПУСК” системи керування СК.
Під терміном СКЕП розуміють сукупність взаємопов’язаних електротехнічних елементів, які формують і виконують дію на двигун з метою керування рухом робочого органу РО у відповідності до вимог технологічного процесу.
 | |||||||||
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() ПФ ВП Д М
ПФ ВП Д М
ЗП РП КЛ РО
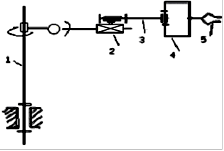
Мал. - 1 Структурна схема СКЕП
На малюнку 1 представлена структурна схема СКЕП де:
ПФ – пристрій формування сигналів керування
ВП – виконавчий пристрій
РП – регулюючий пристрій
Д – електричний двигун
М – механізм технологічний
КЛ – кінематичний ланцюг
РО – робочий орган
Функції які виконує СКЕП:
1. функція пуску, гальмування та реверсування двигуна. Застосовується в металообробній та металургійній промисловості.
2. Автоматичне задання та підтримка швидкості обертання двигуна. Застосовується в металорізальних верстатах.
3. Слідкування за сигналами що входять в систему. Застосовується в копіювальних та фотокопіювальних верстатах, прокатних станах.
4. Автоматичне керування механізмами та комплексами механізмів по заданій програмі з вибором оптимального варіанту. Застосовується у верстатах з ЧПК, автоматичних лініях з виробництва точних приладів.
Основні вимоги до СКЕП:
- простота керування.
- мінімальна кількість машин, апаратів, пристроїв, що входять до СКЕП.
- простота та однотипність машин, апаратів, приборів і пристроїв.
- мінімальна кількість елементів що входять до системи.
- застосування найбільш надійних машин, апаратів, пристроїв.
- гнучкість системи та зручність експлуатації. Чим більше система перелаштовується на інший вид керування тим вона більш гнучка.
- контроль за справністю системи, та зручність знаходження поломок.
- зручність монтажу зумовлює використання окремих вузлів СКЕП у вигляді блоків.
- мінімальні габарити системи.
Вихідні дані:
1. Гальмування динамічне за принципом часу.
2. Пуск за принципом струму.
3. Цикл №1
де - переміщення на підвищеній швидкості wп ;
- переміщення на робочій швидкості wр;
- п’ятисекундна пауза;
4. Час одного циклу – 50 с.
5. Кількість циклів – 16
6. Співвідношення wп/ wр=3
7. Двигун асинхронний двохшвидкісний з короткозамкнутим ротором.
1. Синтез системи керування методом циклограм
У синтезі виділяють дві основні частини:
1. абстрактний синтез – перехід від заданої технологічної програми роботи виробничого механізму до формалізованого алгоритму керування механізмів;
2. структурний синтез – перехід від формалізованого алгоритму керування до схеми керування;
Стосовно до схеми керування багато позиційного електроприводу задача синтезу характеризується відносно невисокою розмінністю і для її вирішення застосовується простий метод циклограм. У заданому методі кінцевим алгоритмом керування є структурні формули, визначення яких виконується через циклограму.
Теоретичне описання циклу
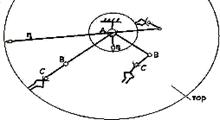
Заданий цикл переміщення зображений на кресленні формату А2. Виконавчий орган електроприводу повинен працювати згідно нього. Перед складанням циклограми теоретично обґрунтуємо роботу виконавчого органу по заданому циклу.
У початковій точці А двигун повинен включитися в мережу і перший етап переміщення виконувати на підвищеній швидкості. Потім, дійшовши до точки В двигун повинен зупинитись (відключитися від мережі). Це досягається за допомогою кінцевих вимикачів. Після відключення двигуна від мережі має включитися гальмування. Далі вмикається пауза. Після витримки паузи двигун вмикається в мережу на робочу швидкість. При досягненні точки С, що відповідає кінцевому вимикачеві, двигун відключається від мережі, гальмується і відбувається реверс на підвищену швидкість. Двигун працює на підвищеній швидкості доки робочий орган не досягне точки А. Після цього двигун відключається від мережі, гальмується, іде витримка паузи. Далі цикл повторюється (по завданню 16 разів). Отже виконавчий орган має відпрацювати 16 циклів, після чого двигун відключиться від мережі.
Побудова циклограми
Циклограма – це графічне зображення стану змінних у вигляді горизонтальної прямої станів. Де:
Хі – незалежна зовнішня змінна;
Yі – залежна зовнішня змінна;
qі – внутрішня залежна змінна;
Напрям дії одної змінної (вхідної) на іншу (вихідну) зображується у вигляді вертикальних прямих зі стрілками. Ці дії викликають зміну стану вихідної змінної. Змінні, до яких на циклограмі не підводяться прямі дії приймаються за незалежні змінні, якими є вхідні величини Х, інші змінні вважаються залежними внутрішніми q та зовнішніми вихідними Y. Інтервал часу на якому стан всіх змінних лишається незмінним називається тактом.
Приймаємо вхідні та вихідні змінні.
Хо – сигнал ключа на початок або кінець руху;
Х1 – сигнал кінцевого вимикача SQ1 встановленого в т. А
Х2 – сигнал кінцевого вимикача SQ2 встановленого в т. В
Х3 – сигнал кінцевого вимикача SQ3 встановленого в т. С
Y1 – сигнал руху робочого органу від т. А до т. В
Y2 – сигнал руху робочого органу від т. В до т. С
Y3 – сигнал руху робочого органу від т. С до т. А
Для вибраних змінних у відповідності з описом роботи двигуна будуємо циклограму.
Складання структурних рівнянь
Умовами виключення змінних Y1, Y2 та Y3 є відповідно:
S”(Y1)=X2; S”(Y2)=X3; S”(Y3)=X1 1.1
Умовою включення для Y2 є допоміжна змінна q2, тобто
S’(Y2)=q2(tb) 1.2
В якості умови включення і умови відключення для q2 вибираємо змінну Х2
S’(q1)=X2; S”(q2)=X2 1.3
Аналогічно для другого періоду включення змінної Y1 приймаємо
S’(Y1(2))=q1; S’(q1)=X1; S”(q1)=X1 1.4
Умовою включення змінної Y3 є:
S’(Y3)=X3
Так як за технічним завданням двигун може бути зупинений оператором у будь-якому місці технологічного циклу, і в будь-який момент часу, то сигнал Хо повинен бути умовою відключення всіх наступних періодів включення, тобто
S”(Y1(2))=X2X0; S”(Y2)=X3Xo; S”(Y3)=X1Xo 1.5
За побудованою циклограмою складаємо структурні формули. Для першого і другого періодів включення змінної Y1 маємо:
Y1(1)=q1 X2X0 1.6
Y1(2)=(q1+Y1) X2X0
q1=X1(+tп)
Y1= Y1(1)+ Y1(2)=(q1+Y1) X2X0
Для періодів включення змінних Y2 та Y3 аналогічно отримаємо
Y2= (q2+Y2) X3X0
Y3= (Х3+Y3) X1X0 1.7
Якщо робочий орган зупинений оператором сигналом Хо між точками А і В, В і С, С і А, то подальша подача сигналу Хо=1 не приведе до включення двигуна, так як сигнали q1 таq2 рівні нулю. Для поновлення руху до умов включення добавимо додаткові сигнали Х4 та Х5 кнопок керування SB.
S’(Y1)=q1+X4; S’(Y2)=q2+X5; S’(Y3)=X3+X5 1.8
Щоб запобігти одночасному включенню контакторів застосуємо блокування – доповнюємо умови відключення змінних Y1,Y2,Y3 перехресними інверсними сигналами Y1,Y2,Y3.
S”(Y1)=X2X0Y2Y3
S”(Y2)=X3X0Y3Y1 1.9
S”(Y3)=X1X0Y1Y2
В кінцевому випадку структурні рівняння мають вигляд
Y1=(q1+Y1+X4) X2X0Y2Y3 1.10
Y2=(q2+Y2+X5) X3X0Y3Y1 1.11
Y3=(X3+Y3+X5) X1X0Y1Y2 1.12
q1=X1(+tп)
q2=X1(+tв)
q1 – додаткова змінна, сигнал реле часу, що забезпечує витримку часу tп=5 с.
q2 – додаткова змінна, сигнал реле часу, що забезпечує витримку часу tв=5 с.
взявши за основу наведені вище структурні формули, які побудовані за циклограмою, складаємо схему керування асинхронним двох швидкісним двигуном. При спрощенні і удосконаленні схеми можливі деякі розбіжності зі структурними формулами.
Похожие работы
... випадків, аварій, а з цим і простоїв на підприємстві, укріпити та створити культуру трудової діяльності. Виконання та розробка дипломного проекту “ Розробка дослідження системи керування електроприводом змінного струму дизель-потягу з використанням нейронних мереж ” відбувається за допомогою комп'ютера, тому питання охорони праці розглядаються щодо забезпечення здорових і безпечних умов роботи ...


... Собівартість, грн 1718 2700 3. Ціна виготовлювача, грн 2474 3500 4. Ринкова ціна, грн 3000 4350 5 ОХОРОНА ПРАЦІ У даному дипломному проекті розроблений телевізійний приймач з можливістю прийому сигналів у форматі MPEG-2, виконаний на декількох печатних платах. Одним з етапів виготовлення пристрою є монтаж радіоэлементів на друковану плату. Монтажно-складальні операції у виробництв ...
... . Варять не більше 20 хв. М'ясний порошок — однорідна маса, отримана подрібненням сухого м'яса, колір світло-коричневий. Варять не більше 5 хв. Волога в порошку не більше 10%, упаковка герметична. ЛЕКЦІЯ ПО ТОВАРОЗНАВСТВУ РИБИ 1.Характеристика сімейств риб Промислові риби класифікують по декількох ознаках. По способу і місцю життя риби ділять на морських, прісноводих, напівпрохідні і прох ...
... ,однак для нього характерні суттєві обмеження. Цей метод не потребує застосування універсальних обчислювальних машин, тому він був широко розповсюджений на протязі ряду років, доки введення обчислювальних засобів в промислові роботи настало економічно оправданим. Обмеження цього методу пов’язані з неможливістю використання давачів. Користувач визначає послідовність дій роботів, яка не може мі ...
0 комментариев