Навигация
Розрахунок слідкуючої системи
14700
знаков
0
таблиц
8
изображений
Міністерство освіти і науки України
Полтавський національний технічний університет імені Юрія Кондратюка
Кафедра Автоматики та електроприводу
Курсова робота на тему:
Розрахунок слідкуючої системи
Зміст
1. Принцип дії системи
2. Диференційне рівняння розімкненої та замкненої систем
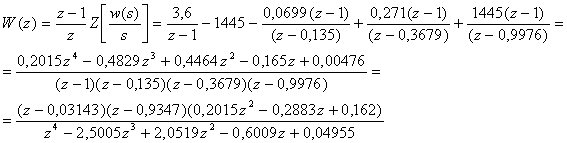
3. Передавальні функції САК
4. Структурна схема системи
5. Граничний коефіцієнт підсилення системи
6. Вибір коефіцієнта підсилення електронного підсилювача
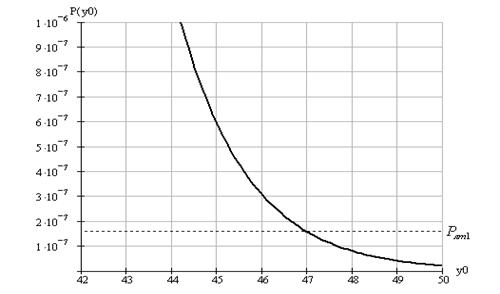
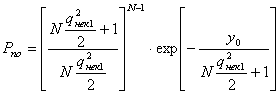
7. Точність керування
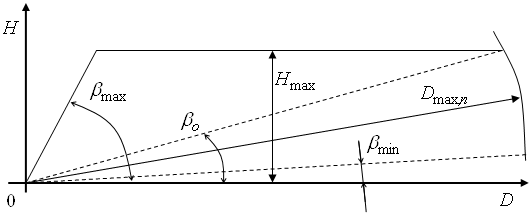
8. Побудова характеристик
9. Корегування слідкуючої системи
10. Передавальні функції окремих елементів корегованої системи
11. Усталена похибка корегованої системи
12. Логарифмічні характеристики розімкненої корегованої системи
12.1 Логарифмічно-частотні характеристики
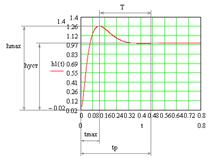
12.2 Перехідна функція замкненої корегованої системи
Література
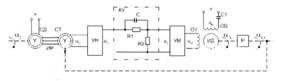
1. Принцип дії системи
Система автоматичного керування (САК) складається з наступних елементів:
1) Вхідний потенціометричний пристрій (КО).
2) Елемент порівняння (суматор)
3) Електронний підсилювач (>)
4) Тиристорний перетворювач (ТП)
5) Двигун постійного струму (Д)
6) Редуктор (РЕД)
7) Робочий механізм (РМ)
8) Вихідний потенціометричний пристрій.
На вхід системи подається кут a, величина якого регулюється, який через потенціометр перетворюється у змінну напругу і поступає на один вхід елемента порівняння. На інший, інверсний, вхід поступає вихідний кут b , перетворений вихідним потенціометром у напругу. На виході суматора маємо напругу U0 = Кв×(a – b) , яка збільшується електронним підсилювачем до значення Un = Kгр ×U0 , що потрапляє на тиристорний перетворювач, який виробляє керуючу напругу на виконавчий двигун Д . Двигун перетворює енергію напруги UД у кінематичну енергію обертання вала, яка через редуктор РЕД іде на робочий механізм РМ звідки вихідне значення кута b через потенціометр подається на елемент порівняння.
Таким чином САК на основі принципу відхилення забезпечує стабілізацію вхідного кута a і підтримує b = a .
Запишемо диференційні рівняння для окремих елементів системи:
1. Елемент порівняння: Uвих = U0 = Uвх1 – Uвх2 = Kв ×a – Kв ×b = Кв×(a – b) , маємо
U0 = Кв×(a – b)
Електронний підсилювач: Uвих = Uп = Кгр ×U0 ;
де Кв – граничний коефіцієнт підсилення електронного підсилювача.
2. Тиристорний перетворювач. З урахуванням інерційності СІФК диференційні рівняння перетворювача має вигляд:
Uд ×(Тпр + 1) = Кп ×Uп.
3. Двигун постійного струму. Для складання диференційних рівнянь ДПС зробимо ряд припущень:
а) система абсолютно жорстка, тобто двигун має одну ступінь свободи;
б) статичний момент, приведений до вала двигуна, - постійний;
в) маса рухомих частин системи постійна;
г) реакція якоря – скомпенсована;
д) залежність кутової швидкості обертання вала двигуна від напруги якоря Uя – лінійна.
Е) потік двигуна постійний Ф = const.
Є) температура обмоток стала.
Із урахуванням припущень отримаємо рівняння роботи ДПС
![]() (1)
(1) ![]() (2)
(2) ![]() (3)
(3)
![]() (4)
(4)
Підставивши (2) і (3) в (1) матимемо: ![]() (5)
(5)
Підставивши (2) і (3) в (1) матимемо:
![]() (6)
(6)
Введемо такі позначення:
![]() – електромеханічна стала часу двигуна; (7)
– електромеханічна стала часу двигуна; (7)
![]() – електромагнітна стала часу якоря;(8)
– електромагнітна стала часу якоря;(8)
![]() – коефіцієнт передачі двигуна по напрузі;(9)
– коефіцієнт передачі двигуна по напрузі;(9)
![]() – коефіцієнт передачі по збурюючому моменту. 10)
– коефіцієнт передачі по збурюючому моменту. 10)
Підставляємо прийняті співвідношення в (6) і одержуємо:
![]() (11)
(11)
Після перетворення Лапласа одержуємо:
![]() (12)
(12)
Відомо, що індуктивність якоря – незначна (менша 0,0001 Гн). Опір Rя=2¸10 Ом. Враховуючи це електромагнітна стала часу якоря ![]() . Отже нею можна знехтувати: Тя » 0.
. Отже нею можна знехтувати: Тя » 0.
Знаходимо передаточні функції двигуна:
![]() (13)
(13)![]() (14)
(14)
Для вихідних систем по куту маємо W(р) = j(р) × р![]()
![]() (15)
(15)![]() (16)
(16)
Редуктор. Здійснює без інерційне пропорційне перетворення частоти обертання (кута) b = Кред × j .
Похожие работы
... ії використають рухливий магнітопровод (ротор) спеціальної форми, що дає можливість змінювати напрямок магнітного потоку в межах 90°. Сельсини застосовують для контролю й керування в системах, що стежать, і для дистанційної передачі показань вимірювальних приладів. Слідкуюча система, система автоматичного регулювання (керування), що відтворює на виході з певною точністю вхідний вплив, що задає, ...
... . 24 Вступ. Ціллю цієї курсової роботи являється закріплення знань основних положень курсу “Теорія Електричного зв’язку ”, шляхом проведення розрахунків характеристик різних систем передачі електрозв’язку та порівняння їх за допомогою розрахованих характеристик. Одним із пунктів курсової роботи являється підбір ...
... VII 31 - 8 1 2 5 15 2 30 VIII 31 - 10 1 1 4 15 2 30 IX 30 - 8 2 1 3 16 1 16 X 16 - 5 1 1 3 6 1 6 Тр=149змін. 3.4 Змінні темпи робіт з будівництва дорожніх одягів визначаємо за залежностями: деV – об’єм матеріалу конструктивного шару дорожнього одягу автомобільної дороги довжиною L, т(м); L – довжина дороги, яка будується, м; Тзм – тривалість ...
... в умовах апріорної невизначеності застосовуються адаптивні системи. Висновок Згідно з технічним завданням на курсову роботу результаті виконання даної курсової роботи були розраховані технічні параметри імпульсної оглядової радіолокаційної станції. А саме було розрахований сигнал, параметри сигналу, параметри антени, реальна розпізнавальна здатність за віддаллю та азимутом, потенційна та ...
0 комментариев