Навигация
Передавальні функції окремих елементів корегованої системи
14700
знаков
0
таблиц
8
изображений
10. Передавальні функції окремих елементів корегованої системи
1) Передавальна функція розімкненої системи:

2) Передавальна функція замкненої системи відносно завдання:

3) Передавальна функція для похибки замкненої системи:
![]()
5) Передавальна функція замкненої системи відносно збурення:

11. Усталена похибка корегованої системи
Визначимо граничний коефіцієнт підсилення скорегованої системи.
Запишемо характеристичне рівняння скорегованої САК:
ТмТп Т2р4+((Тм+Тп)×Т2+ТмТп )р3+(Тм+Тп+Т2)·р2+(1+KG0T1)p+КG0 = 0
0,001132р4 + 0,12р3 +0,693р2 + (1+0,283K)р + 0,435K = 0
Для стійкості необхідно виконання двох умов :
· Правило Стодоли: щоб усі три корені були додатніми, ця умова виконується.
· Критерій Гурвіца: для кубічного рівняння а3 × (а1×а2–а0×а3)–а12× а4 > 0
а0 = 0,001132 а1 = 0,12 а2 = 0,693 а3 = 1+ 0,283K а4 = 0,435K
Маємо квадратну нерівність К2 – 184,4·К – 911,1 = 0
Знаходимо корені К1 = 189,2;К2 = -4,8.
Вибираємо К = 189
З умови, що запас стійкості має лежати в межах 2¸3 коефіцієнт підсилення дорівнює
К= Кг/2,5 = 189/2,5 = 75,6
Приймаємо К = 75
Тоді коефіцієнт електронного підсилювача дорівнює:
Кгр = 75/0,21 = 357,14
Усталена похибка слідкуючої системи дорівнює:
![]()
Де a0 , f0 – усталені значення завдання і збурення відповідно.
Оскільки ми не маємо даних стосовно збурю вальної дії Мс то ми нехтуємо другим доданком. Отже усталена похибка нашої САК дорівнює:
![]()
12. Логарифмічні характеристики розімкненої корегованої системи.
12.1 Логарифмічно-частотні характеристики розімкненої корегованої системи.
Передавальна функція розімкненої корегованої системи має вигляд:
![]()
ЛАЧХ будуємо за допомогою спряжених частот
w1 = 1/Т1 = 1/0,65 = 1,54 с-1;w2 = 1/Т2 = 1/0,283 = 3,53 с-1;
w3 = 1/Тм = 1/0,4 = 2,5 с-1;w4 = 1/Тп = 1/0,01 = 100 с-1;
wÎ [0, w1] – пряма лінія з нахилом –20 (дб/дек);
wÎ [w1, w2] – пряма лінія без нахилу;
wÎ [w2, w3] – пряма лінія з нахилом –20 (дб/дек);
wÎ [w3, w4] – пряма лінія з нахилом –40 (дб/дек);
wÎ [w4, ¥] – пряма лінія з нахилом –60 (дб/дек);
ЛАЧХ корегованої системи:

Рис. 7. ЛАЧХ розімкненої корегованої системи.
ЛФЧХ системи складається з трьох складових j = j1 + j2 + j3 + j4.
j1 = -arctg(1/0) = -90°;
j2 = -arctg(0,17×w);
j3 = -arctg(0,008×w)
![]()
Тоді маємо j(w)=![]() – 90° – arctg(0,4×w) – arctg(0,01×w);
– 90° – arctg(0,4×w) – arctg(0,01×w);
По одержаним залежностям будуємо графік.
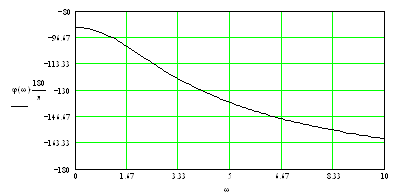
Рис. 8. ЛФЧХ розімкненої корегованої системи.
12.2 Перехідна функція замкненої корегованої системи
Передавальна функція замкненої корегованої системи має вигляд:
![]()
де G0 = T2/T1= 0,283/0,65 = 0,435
Маємо a = 1/р тоді
![]()
Підставивши числові значення одержимо
![]()
Запишемо характеристичне рівняння системи:
0,001132р4 + 0,12р3 + 0,693р2 + 22,22р + 32,62 = 0
За допомогою ЕОМ знаходимо корені рівняння (19):
р1 = –101,9;
р2 = –2,175 – 23,961j = 24,06·e85°j;
р3 = –2,175 + 23,961j = 24,06·e-85°j;
р4 = –1,746.
Далі для знаходження оригіналу h(t) скористаємося другою теоремою Хевісайда , суть якої в наступному : якщо зображення F(p) функції f(t) має вигляд
![]() ;
;
то її оригінал дорівнює![]()
де pk – корені характеристичного рівняння.
В нашому випадку F1(p) = 32,6·(0,65р + 1);
F2(p) = 0,001132р4 + 0,12р3 + 0,693р2 + 22,22р + 32,62;
F’2(р) = 0,00453р3 + 0,36р2 + 1,386р + 22,22.
Знайдемо значення F’2(рк) , де pk – корені характеристичного рівняння.
F’2(р1)=0,001108(–130)3 + 0,1131 (-130)2 + 0,764 (–130) + 21,4 = -600,8
F’2(р2)=0,001108(–2,175 – 23,961j)3 + 0,1131 (–2,175 – 23,961j)2 + 0,764 · ·(–2,175 – 23,961j) +21,4 = -40,521+8,348j = 41,372e-11,6°j
F’2(р3)=0,001108(–2,175 + 23,961j)3 + 0,1131 (–2,175 + 23,961j)2 + 0,764 · ·(–2,175 + 23,961j) + 21,4 = -40,521-8,348j = 41,372e11,6°j
F’2(р4)=0,001108(–1,746)3+0,1131(–1,746)2 + 0,764 (–1,746) + 21,4=20,405
F1(0) = 36,4F2(0) = 36.4
F1(р1) = 36,4·(0,56 (–130) + 1) = -2614
F1(р2) = 36,4·(0,56 (–2,175 – 23,961j) + 1) = -7,935-488,421j = 488,485·e89°j
F1(р3) = 36,4·(0,56(–2,175 + 23,961j) + 1) = -7,935+488,421j = 488,485·e-89°j
F1(р4) = 36,4·(0,56 (-1,746) + 1) = 0,81
Знайдемо вираз для оригіналу f(t) :
h(t)=1–0,0335е -130 t+0,49(е -2,175t+(0,272-23,961t)j+ е -2,175t-(0,272-23,961t)j)-0,0227e-1,746t
h(t)=1–0,0335е -130t –0,0227е -1,746t +0,245e-2,175t ×cos(-23,961t + 0,272)
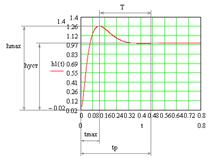
По одержаному аналітичному виразу будуємо графік.
Перехідна характеристика замкненої корегованої системи:
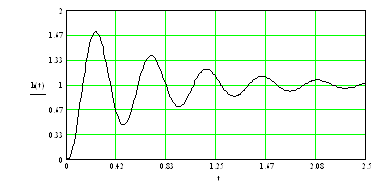
Рис. 9. Перехідна функція замкненої корегованої системи
Якість перехідного процесу характеризується величинами, які визначаємо з графіку:
- Час регулювання Трг = 1,4 с.
- Перерегулювання ![]() = 20,52
= 20,52
- Логарифмічний декремент затухання d=ln(h2/h1)=ln(0,18/0,52)=–1,061
- Запас за фазою – Dy(w) = ½-180° - j(wс)½ = ½-180° – (-162°)½= 18°
- Запас за амплітудою – DL(w)=½L(w-180)½=12 ДБ ; (j(w-180) = -180°)
Список літератури
1. Васильєв Д.В. “Системи автоматического управления”, Москва, “Высшая школа”, 1983 г
2. Попович М.Г “Теорія автоматичного керування ” 1994р.
3. Галай М. В., Бреус М.І “Методичні вказівки по курсовому проектуванню з ТАК” Полтава, ПолТУ.
Похожие работы
... ії використають рухливий магнітопровод (ротор) спеціальної форми, що дає можливість змінювати напрямок магнітного потоку в межах 90°. Сельсини застосовують для контролю й керування в системах, що стежать, і для дистанційної передачі показань вимірювальних приладів. Слідкуюча система, система автоматичного регулювання (керування), що відтворює на виході з певною точністю вхідний вплив, що задає, ...
... . 24 Вступ. Ціллю цієї курсової роботи являється закріплення знань основних положень курсу “Теорія Електричного зв’язку ”, шляхом проведення розрахунків характеристик різних систем передачі електрозв’язку та порівняння їх за допомогою розрахованих характеристик. Одним із пунктів курсової роботи являється підбір ...
... VII 31 - 8 1 2 5 15 2 30 VIII 31 - 10 1 1 4 15 2 30 IX 30 - 8 2 1 3 16 1 16 X 16 - 5 1 1 3 6 1 6 Тр=149змін. 3.4 Змінні темпи робіт з будівництва дорожніх одягів визначаємо за залежностями: деV – об’єм матеріалу конструктивного шару дорожнього одягу автомобільної дороги довжиною L, т(м); L – довжина дороги, яка будується, м; Тзм – тривалість ...
... в умовах апріорної невизначеності застосовуються адаптивні системи. Висновок Згідно з технічним завданням на курсову роботу результаті виконання даної курсової роботи були розраховані технічні параметри імпульсної оглядової радіолокаційної станції. А саме було розрахований сигнал, параметри сигналу, параметри антени, реальна розпізнавальна здатність за віддаллю та азимутом, потенційна та ...
0 комментариев