Навигация
Способы обеспечения высокой надёжности САУ
45097
знаков
0
таблиц
6
изображений
6.1 Способы обеспечения высокой надёжности САУ
Надежность - свойство системы сохранять во времени и в установленных пределах значения всех параметров, характеризующих способность системы выполнять требуемые функции в заданных режимах и условиях эксплуатации.
Надежность системы в большинстве случаев трудно непосредственно получить из первичной информации, кроме того, она не позволяет оценить влияние различных этапов разработки и эксплуатации системы, поэтому надежность рассматривают по трем главным составляющим, которые являются свойствами системы и могут характеризоваться как качественно, так и количественно:
- безотказность-свойство системы сохранять работоспособность в течение требуемого интервала времени непрерывно без вынужденных перерывов.
- восстанавливаемость (ремонтопригодность)-свойство системы, заключающееся в ее приспособленности к предупреждению, обнаружению и устранению причин возникновения отказов, а также поддержанию и восстановлению работоспособного состояния путем проведения технического обслуживания и ремонтов;
- готовность-свойство системы выполнять возложенные на нее функции в любой произвольно выбранный момент времени в установившемся процессе эксплуатации. Готовность определяется как безотказностью, так и восстанавливаемостью системы.
Система выполняющая эти три теоретические показатели считается надёжной.
6.2 Принцип организация безударного перехода
Одним из основных требований при разработке САУ является обеспечение требуемой надёжности и эффективности, а также организации безударных переходов. Для организации безударных переходов используются различные режимы отступления к значению регулирующего параметра, управляющего воздействия или значению задания.
Рассмотрим различные ситуации, которые могут возникнуть в САУ.
• Выход из строя программированного контроллера.
• Обрыв цепи измерительного прибора
• Переход с автоматического режима работы на ручной и наоборот по запросу оператора.
Во всех трёх случаях регулирование уровня воды в барабане будет проходить в ручном режиме до устранения неполадки. Главным орган регулирования, клапан имеет не только электропривод, но и механическое энергонезависимое регулирование положение шаровой заслонки.
6.3 Структурная схема САУ
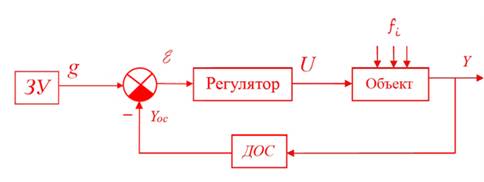
Рис.5. Структурная схема САУ
Объектом управления является барабан котла, в котором регулируется физическая величина Y (уровень воды). На объект действуют внешние возмущения fi приводящие к изменению регулируемой переменной Y. Регулирование объектом осуществляется путём изменения управляющего сигнала U. Регулируемая переменная Y измеряется датчиком обратной связи – ДОС и преобразуется в нормированный выходной сигнал Yoc, который в сравнивающем устройстве сравнивается с нормированным сигналом задания g, формируемым задающим устройством ЗУ, или системой управления вышестоящего уровня. Сигнал отклонения (ошибки) ε поступает на регулятор, который формирует управляющее воздействие U. В состав регулятора входит большое число различных блоков и устройств, обеспечивающих требуемое преобразование сигналов. Это исполнительное устройство (исполнительный двигатель или исполнительный механизм) с регулирующим устройством (клапан, задвижка, заслонка, вентиль и др.); усилитель мощности; модуляторы; демодуляторы; динамические преобразователи (интеграторы, дифференциаторы), формирующие требуемый закон регулирования; нелинейные преобразователи; корректирующие устройства и др. В промышленных системах регулирования различными объектами разными будут регулируемая величина, датчик обратной связи и регулирующее устройство. Все остальные блоки регулятора имеют унифицированные внешние связи и работают с унифицированными сигналами, что позволяет с их помощью реализовывать регуляторы в самых различных промышленных системах регулирования.
7. Разработка технической структуры САУ
7.1 Техническая реализация САУ
Техническая реализация старой САУ на новую, есть аппроксимация оборудования без замены трубопроводов с использованием старых фланцевых соединения в случае с заменой запорной арматуры. Датчики расхода имеют сэндвичное присоединение на трубопроводов, что позволяет производить монтаж и наладку ДР без остановки работы котла, т. е. в «рабочем режиме». Монтаж всех кабелей ТС можно производить с использованием старых трасс и кабельных линий. Данные работы по установке, монтажу ТС и прокладке кабелей осуществляется монтажной бригадой по наряду-допуску и распоряжению. Наладка, программирование контроллера, пуск в работу осуществляется непосредственно квалифицированным персоналом в области автоматизации.
7.2 Техническая структура САУ
7.2.1 Верхний уровень (дистанционное управление, визуализация, регистрация, архивация и т.д.);
7.2.2 Нижний уровень (сбор и первичная обработка информации с датчиков, автоматическое регулирование, создание и выполнение алгоритмов взаимодействия устройств управления);
7.2.3 Полевые устройства управления (исполнительные механизмы, измерительные приборы, устройства сигнализации).
Раскроем уровни САУ подробно с описанием в каждом его назначения, принцип, используемое оборудование.
7.2.1. Верхний уровень, есть операторская станция с промышленным компьютером и другими коммуникационными устройствами. В задачу уровня входит:
• организация операторского интерфейса;
• контроль и отображение технологического процесса;
• архивация данных и формирование отчётов;
• дистанционное управление оборудованием;
• координация и оптимизация технологического процесса.
Связь с нижним уровнем будет осуществляться протоколом ModBus.
7.2.2 Нижний уровень организован программируемым контроллером Mitsubishi ALPHA XL AL2-24MR-A. Программирование в среде FBD. Контроллер выполняет роль цифрового регулятора. Выполнение инструкций на получение операций, обмен данными, будет осуществляться через порт ModBus, RS-232 и центральный процессор i8088.
7.2.3 Полевые устройства управления (исполнительные механизмы, измерительные приборы, устройства сигнализации). Связь между нижним и всеми устройствами будет осуществляться витыми парами с унифицированным выходным сигналом 4…20мА, 0...5 мА.

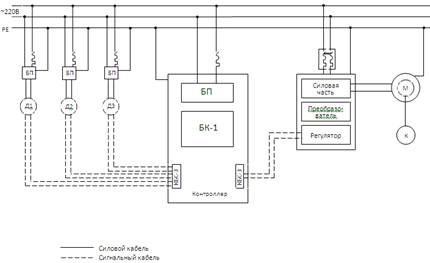
Рис.6. Техническая структура САУ.
7.3 Описание работы САУ
Расход питательной воды и расход пара измеряются методом переменного перепада. Перепад давления пропорциональный расходу питательной воды, создаваемый на камерной диафрагме ДКС06-200-А/Б-1, и перепад давления пропорциональный расходу пара, создаваемый на диафрагме ДКС06-200-А/Б-1 измеряются и преобразуются преобразователем Метран-150CD в унифицированный токовый сигналы 0-5 мА, и с выходов измерительного преобразователя Метран-150CD сигналы подаются через вторичный прибор на входы микроконтроллера Mitsubishi ALPHA XL AL2-24MR-A, он же воздействует на положение питательного шарового крана ФБ39.Х14.100 с электроприводом AUMA SG07.1-11.
8. Разработка электрической схемы САУ.
Этапы разработки электрической схемы САУ:
• организация электропитания устройств автоматизации и защит кабельных линий;
• организация ввода/вывода аналоговых и ввода дискретных сигналов;
• организация сетевого соединения между верхним и нижнем уровнем.
Выводы
В данном курсовом проекте мы рассмотрели возможности регулирования технологического процесса (уровня воды) в котле малой мощности модели Е-50. Для обеспечения надежности регулирования, простоты снятия данных до 8 технологических параметров было рассмотрено регулирующее устройство фирмы Mitsubishi, отличительными чертами которого являются высокая функциональность, надежность и гибкость при умеренной стоимости.
С данным контроллером были рассмотрены модули и датчики необходимые для снятия данных параметра и ввода их в память контроллера.
В итоге можно сказать, что разработанная система является более надежной, «живучей», оперативной, мобильной, интеллектуальной, чем система автоматизированного управления, которая стояла до внедрения рассмотренной нами системы.
Список используемой литературы.
1. Александров В.Г. «Вопросы проектирования паровых котлов средней и малой производительности.» М.-Л., Госэнергоиздат, 1990.
2. Бесекерский В.А., Попов Е.П. «Теория систем автоматизированного управления.» СПб.: Профессия, 2003.
3. Двойнишников В.А. «Конструкция и расчет котлов и котельных установок.» М.:Машиностроение, 1988.
4. Сидельковский Л.Н., Юренев В.Н. «Котельные установки промышленных предприятий: Учебник для вузов.», 3-е изд., перераб.-М.:Энергоатомиздат, 1988.
Также источником информации стали некоторые сайты:
1. http://rosenergostal.ru
2. http://www.es-electro-ural.ru
Приложение
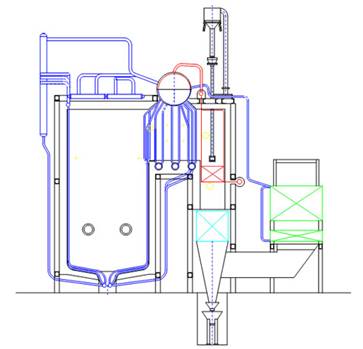
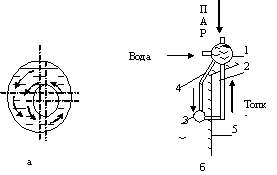
1. Принципиальная схема барабанного котла Е-50
2. Электрическая схема САУ
Похожие работы
... первый взгляд кажутся монотонными). Как показал анализ эта немонотонность обусловлена способом дефаззификации. Таким образом, целесообразно при построении нечётких систем управления пользоваться не только знаниями эксперта, но также базовыми понятиями теории автоматического управления. Дать общие рекомендации относительно выбора того или иного базиса не представляется возможным – все зависит от ...
... теплоносителя и топливных ресурсов. Рассмотрим такую систему теплоснабжения шахты (см. рис.1), которая, по мнению авторов, учитывает выдвинутые выше требования. [1]. В ее основу заложена многоконтурная система автоматического управления шахтными котельными, т.е. такая система, в которой присутствует несколько контуров управления – по числу основных технологических параметров топок НТКС. В данной ...
... и сигнализация нарушений и аварийных ситуаций с их протоколированием; Возможность дистанционного управления регулирующими исполнительными механизмами; Надежность. Для более эффективного функционирования системы автоматизации можно предъявить к Scada-пакету следующие требования: Контроль над технологическим процессом, состояние технологического оборудования и управление процессами и ...
... сигналами времени. Ядро предлагает интерфейс для программирования приложения с целью получения функций в виде отдельных программ. 1.2 Разработка автоматизированной системы управления электроснабжением КС «Ухтинская» 1.2.1 Цель создания АСУ-ЭС Целью разработки является создание интегрированной АСУ ТП, объединяющей в единое целое АСУ электрической и теплотехнической частей электростанции, ...
0 комментариев