Навигация
Алгоритм оптимизированного управления
35842
знака
4
таблицы
19
изображений
1.7 Алгоритм оптимизированного управления
Для нахождения оптимального значения хладопроизводительности необходимо знать зависимость изменения температуры хладагента от давления кипения.
Оптимальная задача в данном случае состоит в том, чтобы поддержать максимальную хладопроизводительность компрессора при наименьшей температуре кипения. Контроллер осуществляет расчет системы уравнений, состоящей из уравнения экспериментальной кривой и температурой задания, и находит минимальное значение температуры кипения. После чего формирует закон регулирования.
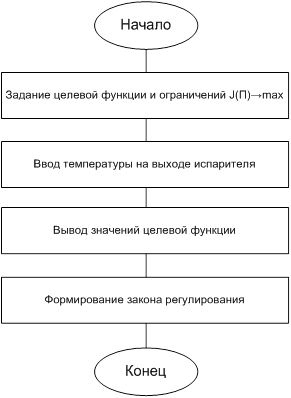
Рисунок 1.4 - Алгоритм оптимизированного управления
1.8 Структура двухуровневого управления
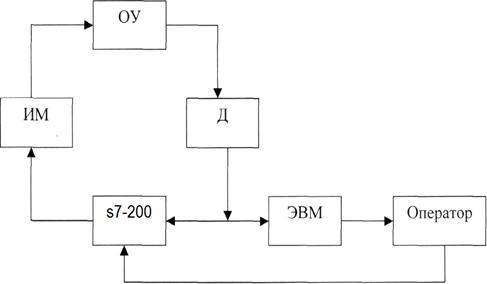
Рисунок 1.5 - Структура двухуровнего управления. Режим советчика.
ОУ - объект управления; Д - датчик; s7-200 - ПМК; ИМ - исполнительный механизм; ЭВМ - вычислительная машина; Оператор - оператор ЭВМ.
Необходимость двухуровневого управления в режиме советчика заключается в том, что велика вероятность ошибки, а также по желанию заказчика, требуется непосредственный контроль человека. Но система способна функционировать и автономно.
Информация о состоянии объекта от датчиков поступает на s7-200, где она обрабатывается и в качестве рекомендаций выдается информация об изменении управления или корректировки. Оператор анализирует полученную информацию и принимает меры по изменению управляющих воздействий.
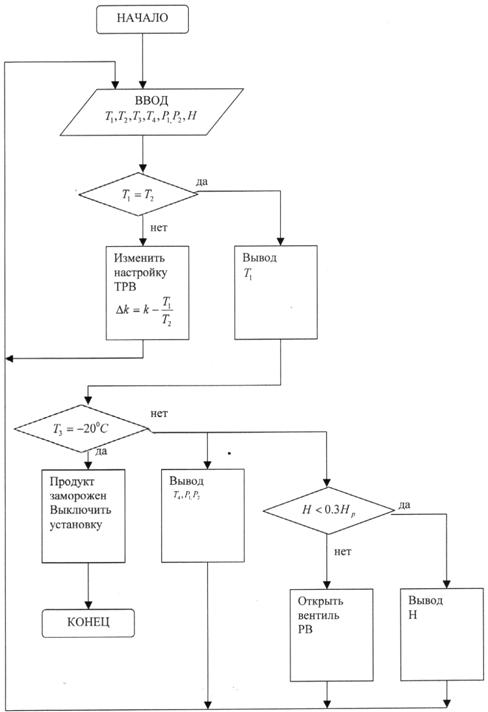
Блок-схема алгоритма функционирования двухуровнего управления с кординирующей подсистемой на верхнем уровне приведена на рисунке 1.6
На рисунке 1.6 температура Т1 - это температура на выходе из испарителя, а Т2 - температура на входе в испаритель. Для регулирования наполнения испарителя хладогеном, устанавливается регулятор перегрева (ТРВ), который представляет собой П - регулятор. При уменьшении заполнения испарителя перегрев пара на выходе возрастает и ТРВ автоматически увеличивает подачу хладагента. Температура Т1 =Qп = -30°С.
Испаритель наполнен (100%) жидким хладагентом, если Т1 = Т2. В случае если равенство не выполняется, то необходимо изменить настройку ТРВ.
Т3 - температура объекта (продукта),
Т3= Qп = -20°С, если продукт еще не охладился до температуры Т3 процесс продолжается, в противном случае выдается сообщение о том, что технологический процесс окончен и необходимо выгружать продукт и размораживать установку.
Т4 - температура в холодильной камере, °С;
P1 - давление в конденсаторе, кПа;
Р2 - давление в ЦР, кПа;
Н - уровень заполнения циркуляционного ресивера, м.
Уровень жидкости в циркуляционном ресивере (Н) должен быть в пределах 0,2 ÷ 0,3 высоты ресивера. При повышении уровня жидкость может попасть в компрессор, а при снижении - нарушается подача в испаритель
|
1.9 Структура алгоритма адаптивного управления
Для данной системы управления, в которой свойства холодильной установки можно считать не изменяющимися во времени, т.к. площадь теплопередающей поверхности испарителя не меняется, коэффициент теплопередачи испарителя тоже не меняется во времени. Но так как изменяться во времени может коэффициент теплопередачи продукта, если замораживать различные продукты в каждом цикле охлаждения, а также может изменяться площадь поверхности продукта, если в холодильную камеру загрузили не всю партию продукта, которую она может вместить, а лишь часть ее, необходимо использовать адаптивное управление.
Таким образом, адаптацию можно проводить с каждым циклом охлаждения, зная количество загружаемого продукта в холодильную камеру, т.е. общую площадь теплопередающей поверхности и коэффициент теплопередачи продукта, который зависит от вида продукта. Зная эти данные, можно рассчитать новые коэффициенты в модели объекта, но для достижения максимальной производительности установки, управляющее воздействие должно иметь максимальное значение, т.е. температура в испарителе должна поддерживаться минимальной, не зависимо от свойств продукта и его количества. Поэтому в данном случае алгоритм адаптации будет заключаться лишь в уточнении модели объекта.
Если бы мы имели объект, свойства которого менялись во времени, то к такому объекту можно было бы применить прямой алгоритм адаптации управляющего устройства непосредственно по величине критерия оптимальности.
Положим, что g(t) - полезный задающий сигнал, тогда можно определить рассогласование
![]() , (1.20)
, (1.20)
где ![]() - выход объекта.
- выход объекта.
Тогда критерий оптимальности можно записать в виде
![]() (1.21)
(1.21)
Подставив в формулу (1.20) значение j(t) можно убедиться, что J1 = F (bо), т.е. является функцией коэффициентов регулятора.
J1 = F (bр)b ®min (1.22)
Другими словами, минимизируя функцию J находим оптимальные коэффициенты регулятора, корректируя которые изменяем управляющее воздействие.
Обобщенная структура системы, реализующей прямой алгоритм адаптации приведена на рисунке 1.7
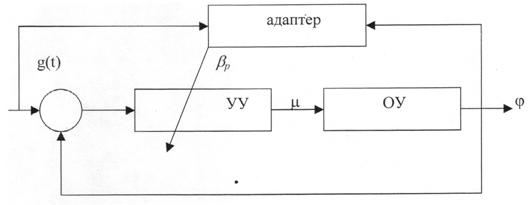
Рисунок 1.7 - Структура адаптивной системы
Под адаптацией подразумевается изменение свойств модели объекта относительно самой системы в процессе протекания технологического процесса. Адаптация происходит следующим образом: на вход управляющего устройства поступает задающий сигнал g(t), после чего снимается значение сигнала на выходе объекта j(t). Адаптер определяет рассогласование e(t) входного и выходного сигнала. Если рассогласование превышает допустимое значение, адаптер изменяет параметры П - регулятора, а именно коэффициент усиления, после чего процесс повторяется.
На рисунке 1.8 приведена блок схема данного алгоритма.
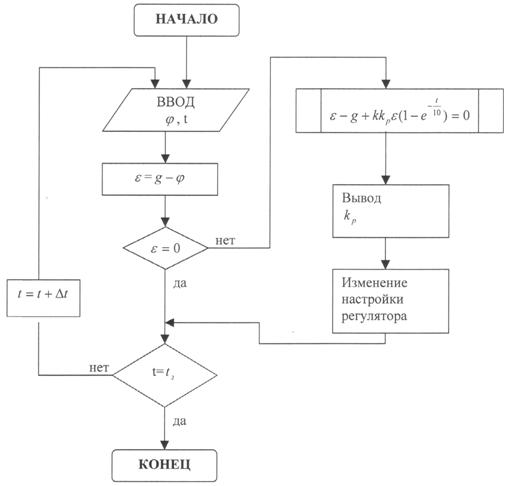
Рисунок 1.8 — Блок-схема прямого алгоритма адаптации
На рисунке 1.8 приведена блок-схема прямого алгоритма адаптации объекта, математическая модель которого может быть представлена дифференциальным уравнением 1-го порядка, а управляющее устройство реализует П - закон регулирования.
Похожие работы
... .3 +810.3 Срок окупаемости Лет -- 0.242 -- Вывод Из данного расчета и проведенного анализа технико-экономических показателей делаем вывод о целесообразности внедрения «Автоматизированной системы управления компрессорной установкой». Так как в результате годовая экономия затрат от автоматизации системы составляет 3347839.05 рублей. Это достигается за счет экономии в зарплате 785925.5 ...
... батареи и воздухоохладители)? испарители для охлаждения промежуточного хладоносителя; отделители жидкости или защитные ресиверы (при надобности). Автоматизация испарительной системы холодильной установки с промежуточным хладоносителем (рассолом) предусматривает: а) автоматическое регулирование температуры воздуха в охлаждаемых помещениях; б) автоматическое регулирование температуры ...
... камере понижается ниже допустимой , то в данном случае включаются электронагреватели , которые встроены в ВО. Включением и выключением поддерживают заданную температуру в камере. 3.2 Работа узлов функциональной схемы автоматизации холодильного модуля. Основной регулируемой величиной в данной схеме есть температура воздуха в холодильной камере. Ее регулируют включением и выключением КМ , а зимой ...

... (при утехах). Поэтому возникает необходимость замены холодильной установки на более современную в достижениях холодильной техники. 3. Описание холодильной установки 3. Описание холодильной установки. Судовая холодильная установка состоит из двух систем холодильного агента обслуживающих каждый роторный морозильный аппарат FGP-25-3, включающих в себя два ...
0 комментариев