Вибір електродвигуна і його перевірка
Вибір інформаційних електромеханічних елементів виконавчих систем верстата
Вибір датчика струму
Визначення і структурна схема контуру регулювання струму в системі керований перетворювач – двигун
Визначення параметрів контуру регулювання положення системі з підпорядкованими контурами швидкості і струму
Навигация
Визначення і структурна схема контуру регулювання струму в системі керований перетворювач – двигун
Визначення параметрів електропривода верстата з ЧПК з підпорядкованим регулюванням координат
26498
знаков
7
таблиц
14
изображений
4.2 Визначення і структурна схема контуру регулювання струму в системі керований перетворювач – двигун
Визначимо параметри структурної схеми контуру регулювання струму. Для цього спочатку визначимо електромеханічну сталу часу регулювання:
JS – сумарний момент інерції двигуна, тахогенератора і виконуючого механізму маніпулятора.
![]() кг×м2
кг×м2
![]() с
с
Передавальна функція об’єкта регулювання з урахуванням сталої часу тиристорного перетворювача tтп і сталої часу інерційного фільтру tф у системі СІФК, які є некомпенсованими і складають:
![]()
має вигляд:
Де Ктп– коефіцієнт підсилення тиристорного перетворювача, який визначається:
Де Uк.мах – максимальне значення напруги керування тиристорним перетворювачем. Приймаємо Uк.мах = 10 В.
Таким чином передавальна функція об'єкта регулювання має вигляд :
В даному випадку об'єктом регулювання виступає лише контур регулювання струму, а не вся система.
З огляду на реальні співвідношення Тm і Та в результаті послідовної корекції отримуємо передавальну функцію розімкнутого контуру:

Коефіцієнт зворотного зв’язку визначається так:

Де Uзс.мах – максимальне значення напруги задання струму, приймаємо 10 В.
В даному випадку нам важливо, щоб контур регулювання струму мав підвищену точність і виключав статичну похибку за збурюванням. Відповідно цим властивостям відповідають настройки технічного оптимуму. Швидкодія контуру визначається постійною ас, яка дорівнює 2, при настроюванні на технічний оптимум. Таким чином передавальна функція розімкнутого контуру запишеться так:

Передавальна функція регулятора струму визначається так :
 ,
,
Де Тіс – стала часу контуру регулювання струму :


Таким чином ми отримали ПІ-регулятор струму, налагоджений на технічний оптимум.
Визначимо параметри регулятора струму.
Приймемо Сззс = 8,2 мкФ. Тоді:
 ;
;
 ;
;
Де Rпззс – опір у ланцюзі зворотного зв'язку ПІ-регулятора струму.
Rззс = Rзс×Кдс /Кззс = 4,634×3,5/0,222 = 73,059 кОм.
Кдс – коефіцієнт передачі датчика струму.
Схема регулятора струму наведена в додатках.
4.3 Розрахунок параметрів контуру регулювання швидкості в системі з підпорядкованим контуром струму
Функціональна і структурна схеми контуру регулювання швидкості наведені в додатках.
Передавальна функція замкнутого контуру, з урахуванням вище розрахованих параметрів, визначається так :

У структурній схемі струмів контур і виконавчий механізм складають об'єкт регулювання для контуру швидкості
Для досягнення підвищеної швидкодії контуру регулювання швидкості, налагоджуємо його на симетричний оптимум.
При цьому в якості регулятора швидкості застосовуємо ПІ-регулятор, передавальна функція якого має вигляд
 ;
;
При стандартній настройці на симетричний оптимум регулятора швидкості приймаємо :
Тр.ш = 8×Тm = 8×0,01 = 0,08 с.
Кр.ш =  .
.
Деаш – швидкодія контуру регулювання швидкості (значна).
Кззш – коефіцієнт зворотного зв'язку за швидкістю :
(Приймаємо Uзш.ном=10 В.)
 ;
;
 ;
;
Кр.ш = ![]() ;
;
 .
.
Значення пасивних елементів зворотного зв’язку знаходимо із співвідношень :
Трш = Rзш×Сззш;ТМ = Rпззш×Сззш;
Де Rпззш – опір у ланцюзі зворотного зв'язку ПІ-регулятора швидкості.
Приймаємо Сззш = 8,2 мкФ, тоді
 кОм;
кОм;
 кОм;
кОм;
 кОм.
кОм.
Через мале перерегулювання (4,3%) перехідні процеси оптимізованого контуру струму близькі до аперіодичного і тому передавальна функція має вигляд більш простої передавальної функції аперіодичної ланки:

У цьому випадку передавальна функція розімкненого контуру швидкості має вигляд:


![]()
Регулятор швидкості компенсував велику сталу часу ТМ і динамічні властивості контуру швидкості визначаються лише меншою сталою часу Тm. Передавальна функція замкненого контуру швидкості має вигляд :


Наявність форсуючої ланки в передавальній функції приводить до великого пере регулювання, яке може досягати 43%. Пере регулювання можна зменшити до 8%, якщо на вхід оптимізованого контуру швидкості додати аперіодичний фільтр зі сталою часу Тф = 8Тm, що здатний компенсувати форсуючу ланку в передавальній функції. Тоді передавальна функція замкненого контуру швидкості отримає вигляд :

Механічна характеристика синтезованого приводу зображена на рис. 3:
![]()
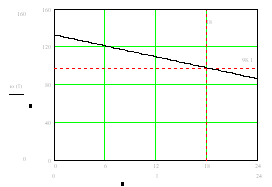
Рис. 3. Електромеханічна характеристика синтезованого електроприводу
Структурна схема контуру регулювання швидкості наведена в додатках
0 комментариев