Навигация
4. Система АПК-ДК
Аппаратно-программный комплекс диспетчерского контроля (АПК-ДК) является наиболее удачной реализацией функций диспетчерского контроля на современном техническом уровне.
Использование средств вычислительной техники расширило функциональные возможности системы АПК-ДК не только для поездного диспетчера, но позволило решить и основные задачи контроля состояния технических средств систем ЖАТ на перегонах и станциях диспетчерского участка.
Таким образом, система АПК-ДК имеет двойное назначение и обеспечивает:
оперативный съем информации на сигнальных точках перегонов о состоянии рельсовых участков, светофоров и других средств и передачу ее на станции для последующего использования для контроля поездного положения и технического диагностирования перегонных устройств;
оперативный съем информации на станциях о состоянии путевых объектов и технических средств и передачу ее поездному диспетчеру и диспетчеру дистанции сигнализации, связи и вычислительной техники;
обработку и отображение информации у пользователей по ведению исполняемого графика движения; расчету прогнозного графика по текущему поездному положению; расчету показателей работы участка и выдаче справок; логическому определению ложной свободности участка и опасного сближения поездов; анализу работы устройств; определению предотказного состояния устройств; обнаружению отказа; оптимизации поиска и устранению отказа; архивации и восстановлению событий; статистике и учету ресурсов приборов.
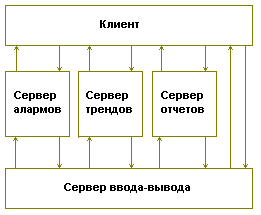
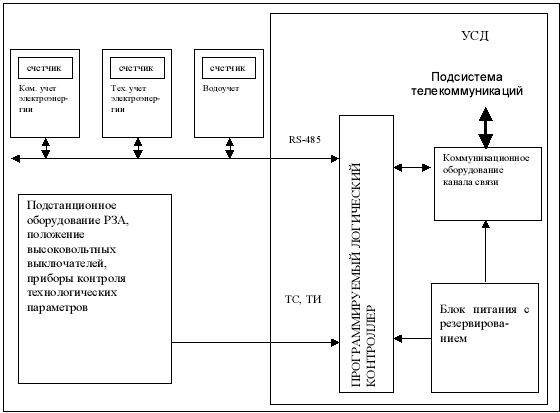
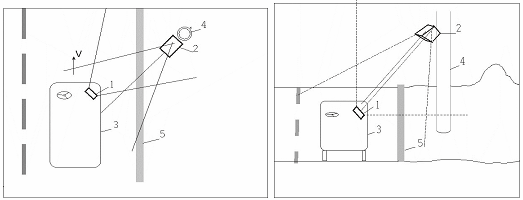
На станциях, т.е. на первом (нижнем) уровне управления перевозочным процессом (рис. 5) выполняются сбор, преобразование, концентрация информации о состоянии перегонных и станционных устройств. Далее эта информация может быть отображена на АРМах дежурного по станции и дежурного электромеханика, но обязательно передается на второй уровень управления, т.е. поездному диспетчеру, и на АРМ диспетчера дистанции сигнализации, связи и вычислительной техники.
Состояние перегонных устройств систем ЖАТ контролируют автоматы контроля сигнальных точек (АКСТ), выполненные на базе специализированных контроллеров. Наибольшее распространение имеет блок АКСТ-СЧМ, представляющий собой генератор частоты, формирующий посылаемые в линию связи циклические восьмиимпульсные частотные посылки в соответствии с состоянием контролируемых объектов. При восьми выходных импульсах благодаря манипуляции по длительности импульсов и пауз (интервалов) АКСТ-ЧМ позволяет контролировать состояние семи дискретных датчиков (реле) и двух пороговых датчиков.
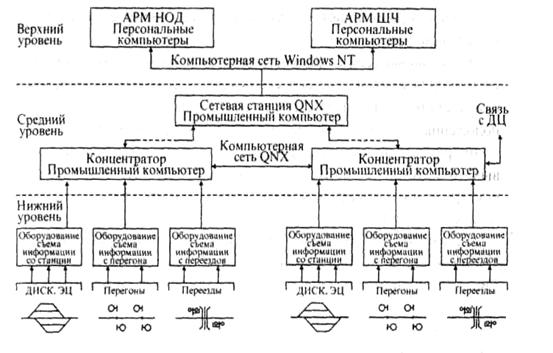
Рис. 5. Структурная схема системы АПК ДК
При этом соблюдаются следующие правила:
длительность импульса в один такт соответствует замкнутому состоянию контакта датчика и состоянию «параметр в норме» порогового датчика;
длительность импульса в два такта соответствует разомкнутому состоянию контактного датчика и состоянию «параметр не в норме» порогового датчика;
длительность разделительного интервала между импульсами в один такт соответствует разомкнутому состоянию датчика;
длительность разделительного интервала в два такта соответствует замкнутому состоянию датчика;
длительность паузы между посылками восьмиимпульсных комбинаций установлена равной трем тактам;
длительность такта (0,468 ± 0,007) с.
При проектировании АПК-ДК определяется перечень параметров, контролируемых каждым АКСТ-СЧМ.
Для систем автоблокировки параметры выбирают из следующего перечня: отсутствие основного питания на сигнальной точке; отсутствие резервного питания; перегорание основной нити лампы красного огня; перегорание резервной нити лампы красного огня; перегорание нити лампы разрешающего огня; установленное направление движения; сход изолирующего стыка; пропадание постоянного напряжения блока БС-ДА; занятость блок участка; неисправность АКСТ-СЧМ или линии ДСМ; пропадание обоих фидеров питания на объектах с аккумуляторным резервом; аварийный отказ.
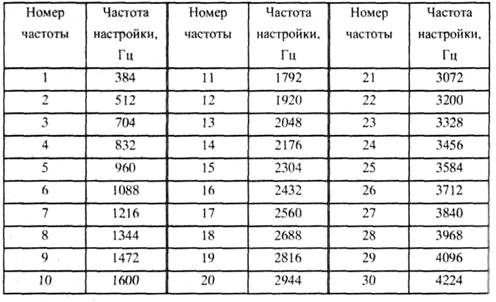
При проектировании для каждого АКСТ-ЧМ устанавливается несущая частота (частота настройки генератора), поскольку все АКСТ перегона работают по общей физической линии с частотным разделением каналов.
На одной физической цепи может работать до 30 АКСТ-ЧМ со следующим разделением частот (табл. 2.).
Таблица 2
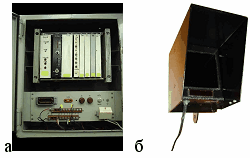
На станциях (линейных пунктах) принимается и анализируется информация от АКСТ-СЧМ соответствующими концентраторами (промышленный компьютер). В качестве средства согласования физической линии с сигналами от АКСТ-СЧМ перегонов с портом компьютера используются блоки
СЧД-10 (селектор частот демодулирующий десятиканальный).
Устройство согласования (рис. 6) с физической линией (ДСН) обеспечивает гальваническую развязку от линии, необходимую защиту от импульсных перенапряжений, предварительное усиление и нормирование входного сигнала.

Рис. 6. Структурная схема блока СЧД-10
Синтезатор сетки частот (на основе программируемой логической матрицы) позволяет формировать необходимые частоты (образцы сигналов) для синхронного детектирования частот, поступающих от АКСТ-СЧМ. Десятиканальный цифровой детектор с компаратором уровня сигнала обеспечивает одновременную обработку сигналов от 10 АКСТ.
Выделенные детектором сигналы поступают на устройства усиления и гальванической развязки и индикации и далее с выходов СЧД (оптронные ключи) в концентратор для анализа и последующих преобразований информации.
Работу блока СЧД-10 обеспечивает источник питания, представляющий собой стабилизированный однотактный преобразователь постоянного напряжения 24—32 В в посто-янное напряжение 12 и 5 В.
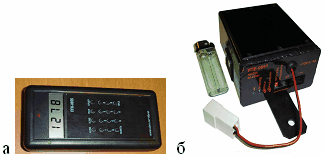
Для съема информации со станционных устройств в системе АПК-ДК используются приборы ПИК-10 и ПИК-120, выполненные на основе программируемых индустриальных контроллеров (ПИК).
Прибор ПИК-10 имеет 10 аналоговых и 10 цифровых входов и предназначен для следующего:
измерения средних значений напряжений на обмотках путевых реле;
преобразования переменного напряжения на цифровом входе в сигнал логической 1 и логического 0 при его отсутствии;
измерения сопротивления изоляции внешних цепей;
преобразования в цифровой вид измеренных значений напряжения и передачи на внешний процессор в виде 10-разрядного кода;
передачи измеренных значений сопротивления изоляции в виде последовательного цифрового кода на внешний процессор по его запросу;
формирования сигнала включения внешнего модема.
В ПИК-10.2 (рис. 7) внешние измеряемые напряжения подаются на 10 аналоговых дифференциальных входов. Измерения начинаются, если на микроконтроллер от внешнего процессора поступает соответствующая команда.
Аналоговые входы микроконтроллер опрашивает, последовательно подключая каждый из них к общему аналого-цифровому преобразователю АЦП.
Входы переключаются релейно-транзисторным коммутатором. Измеряемое напряжение выпрямляется прецезионным выпрямителем, фильтруется фильтром низкой частоты ФНЧ и в виде однополярного аналогового сигнала с напряжением, равным среднему значению входного сигнала, подается через мультиплексор на АЦП, где преобразуется в восьмибитный код.
При измерении сопротивления изоляции +24 В подключаются к внешнему проводу и измеряют сопротивление току утечки на «землю».
Цепь тока утечки (измерения): +24 В, RB и ![]() ФНЧ и входные сопротивления аналогового преобразователя дифференциального сигнала в однополярный на внешний провод, подключенный релейно-транзисторным коммутатором аналоговых дифференциальных сигналов, сопротивление изоляции, - 24 В. Для измерения на АЦП через мультиплексор подается напряжение, выделяемое на
ФНЧ и входные сопротивления аналогового преобразователя дифференциального сигнала в однополярный на внешний провод, подключенный релейно-транзисторным коммутатором аналоговых дифференциальных сигналов, сопротивление изоляции, - 24 В. Для измерения на АЦП через мультиплексор подается напряжение, выделяемое на ![]() и пропорциональное сопротивлению изоляции.
и пропорциональное сопротивлению изоляции.
Во избежание влияния на измерение сопротивления изоляции входного переменного напряжения параллельно ![]() подключен конденсатор, образующий совместно с
подключен конденсатор, образующий совместно с ![]() и RB низкочастотный фильтр
и RB низкочастотный фильтр
Для повышения точности измерений напряжения и сопротивления изоляции по каждому каналу полученные данные усредняются за 256 выборок. Это позволяет измерять напряжение с точностью 2%, а сопротивление изоляции 5%.
Десять цифровых входов через оптронные преобразователи подключаются к соответствующим входам портов контроллера.
Если на цифровом входе присутствует переменное напряжение, на выходе оптрона возникает пульсирующее напряжение с амплитудой, соответствующей транзисторно-транзисторной логике (ТТЛ). В противном случае на выходе устанавливается постоянное напряжение +5 В.
Связь микроконтроллера с управляющим внешним процессором устанавливается по двум последовательным линиям Rx и Rxтипа «токовая петля» или через интерфейс RS-485 с максимальной скоростью до 9600 Бод. Одновременно к одной линии связи может быть подключено до 16 приборов ПИК-10 с индивидуальными адресами.
На линейных пунктах необходимо контролировать большое число дискретных датчиков — реле ЭЦ. Для этой цели используются приборы ПИК-120 с 120 цифровыми входами, распределенными на 15 независимых групп по восемь входов в каждой.
Дискретные сигналы на входы ПИК-120 подаются специально выделенными контактами реле ЭЦ или через оптронные развязки с клемм пульта управления ЭЦ. Последний вариант предпочтительнее, так как не требует установки дополнительных реле-повторителей при отсутствии свободных контактов у контролируемых основных реле.
Каждый цифровой вход ПИК-120 (рис. 8) имеет оптронный преобразователь для гальванической развязки и общий для групп коммутируемый преобразователь уровня ТТЛ. Информация с входов считывается погруппно, т.е. побайтно, так как в группе содержится восемь входов, подключенных микроконтроллером одновременно.
При наличии напряжения на цифровом входе на соответствующем выходе преобразователя устанавливается низкий потенциал, в противном случае формируется постоянное напряжение + 5 В.
Связь микроконтроллера с ведущим процессором устанавливается по двум последовательным линиям Rx и Rx типа «токовая петля» или конвертором RS-485. Одновременно по одной линии могут работать до 16 приборов ПИК-120.
Похожие работы
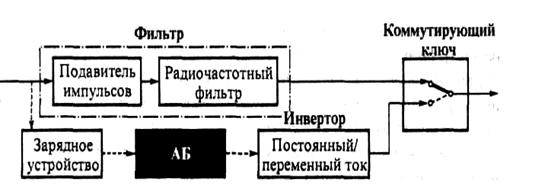
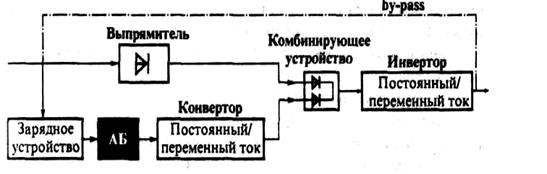

... контроля функционирования источников бесперебойного питания; программный аналог испытательного статива для контроля корректности обработки формируемых команд управления. 4. Организация электропитания систем Основным условием бесперебойной работы систем диспетчерской централизации, в особенности использующей надежного электроснабжения устройств центрального поста (центра управления) и ...
... К. Сатпаева» для просмотра и ввода информации системы оперативно-диспетчерского контроля и управления, создаваемые на Visual Basic. Специфика используемого в системе оперативно-диспетчерского контроля и управления РГП «Канал им. К. Сатпаева» ПО такая, что разработка ПО, как таковая, может производиться только при создании самой системы. Применяемое ПО является полуфабрикатом. Основная задача ...

... Этим выражается направленность передачи управляющей и контрольной информации между подсистемами. Часто структура выражает только соотношение между подсистемами по управлению (подчиненность). В диспетчерском управлении железнодорожным транспортом получили распространение иерархические централизованные структуры (рис. 1.2, д). В этом случае каждый более высокий уровень управления имеет радиальные ...

... контроля и управления движением осуществляется с помощью технических средств связи, сигнализации, телемеханики и автоматики. 3. Автоматизированная система диспетчерского управления городского пассажирского транспорта (АСДУ ГПТ) "Фара-0050" 3.1 Область применения В больших городах с развитым транспортным хозяйством неизбежно возникает проблема организации ритмичной работы ...
0 комментариев