Навигация
Уравнение движения рыскания
19021
знак
0
таблиц
21
изображение
1 Уравнение движения рыскания
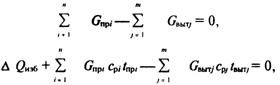
Допустим, что ЛА совершает горизонтальный полет с постоянной скоростью и управляется автопилотом. Для получения уравнений движения рыскания приравняем проекции внешних и инерционных сил на нормаль (ось Oz) к траектории, а также внешний и инерционный моменты относительно нормальной оси ЛА (оси Oyc):
где Z – боковая аэродинамическая сила;
Y - угол поворота траектории;
Iy – момент инерции ЛА относительно связанной оси Oyc;
wy – скорость рыскания (угловая скорость ЛА относительно оси Oyc);
My – аэродинамический момент рыскания.
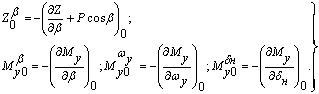
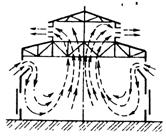
Рис.1. Схема сил и моментов действующих на объект
Линейные дифференциальные уравнения движения рыскания имеют вид:
 ,
,
где для постоянных коэффициентов введены следующие обозначения:
Нулевой индекс у скобок обозначает, что производная и параметры взяты для выбранного невозмущенного движения.
В некоторых случаях уравнения движения рыскания еще более упрощают. Дальнейшее упрощение этих уравнений основывается на том, что в большинстве режимов полета руль направления устраняет скольжение и можно положить, что Db=0. Тогда движение рыскания будет описываться одним уравнением:
![]()
Это же уравнение описывает движение ЛА, нейтрального в путевом отношении, т.е. ЛА, у которого коэффициент момента путевой устойчивости равен нулю: ![]() .
.
Если пренебречь движением центра масс под действием боковых сил и рассматривать лишь колебания продольной оси ЛА относительно вектора скорости, т.е. положить Db=Dy, то уравнение движения примет вид:
![]()
2 Датчики сигналов о параметрах движения ЛА
Характеристиками датчиков являются передаточные функции и статические погрешности. Статические погрешности датчиков должны быть меньше допустимых погрешностей процессов управления. Динамические погрешности датчиков, определяемые по передаточным функциям, в полосе пропускания контура ЛА-АП должны быть малы.
Для измерения углов тангажа, рыскания и крена ЛА применяются свободные гироскопы (на беспилотных ЛА с малым временем полета), корректируемые трехстепенные гироскопы и гироскопические системы типа гировертикалей, гироскопов направления, курсовертикалей, пространственных гиростабилизированных платформ. Иногда (для беспилотных ЛА) для измерения угла применяются двухстепенные интегрирующие гироскопы.
При исследовании системы стабилизации ЛА-АП датчики углов будем считать безынерционными звеньями, полагая, что
![]()
где ![]() - напряжение, снимаемое с гироскопического датчика угла;
- напряжение, снимаемое с гироскопического датчика угла;
kГ – коэффициент передачи гироскопа;
![]() - угол, измеряемый гироскопом.
- угол, измеряемый гироскопом.
Измерение угловых скоростей ЛА осуществляется двухстепенными или трехстепенными гиротахометрами (ГТ). В последние годы для этих целей начали применять ГТ, построенные на базе лазерных и вибрационных гироскопов. ГТ на базе обычного и вибрационного гироскопа можно рассматривать как колебательное звено. Однако, если собственная частота ГТ выбрана порядка 10-50 Гц, то такой прибор будет иметь малые динамические погрешности при измерении угловых колебаний ЛА по тангажу, рысканию и крену, происходящих с частотой, обычно не превышающей несколько герц. Уравнение датчика угловой скорости, частота собственных колебаний которого во много раз превышает частоту изменения измеряемой угловой скорости, при исследовании системы ЛА-АП будем записывать в виде:
![]()
где UГГ – напряжение, снимаемое с ГТ;
kГТ – коэффициент передачи с ГТ;
![]() - измеряемая угловая скорость.
- измеряемая угловая скорость.
Сигнал, пропорциональный угловому ускорению ЛА, получают либо дифференцируя сигнал ГТ, либо путем применения трехстепенных гиротахоакселерометров. Для датчика углового ускорения, имеющего частоту собственного колебания, во много раз превышающую частоту изменения измеряемого углового ускорения, положим:
где UДУУ - сигнал, снимаемый с датчика углового ускорения;
kДУУ – коэффициент передачи;
![]() - измеряемое угловое ускорение.
- измеряемое угловое ускорение.
Сигналы, пропорциональные угловой скорости и угловому ускорению ЛА, можно получить и дифференцированием сигнала датчика угла с помощью RC-цепочки. Однако в этом случае в сигналах по угловой скорости и угловому ускорению будут значительные динамические погрешности, обусловленные RC-цепочкой.
Похожие работы
... или технологических процессов; – при выборе технического решения обеспечить малоотходность производства и максимальную эффективность использования энергоресурсов. Задачи специалиста в области безопасности жизнедеятельности сводятся к следующему; – контроль и поддержание допустимых условий (параметры микроклимата, освещение и др.) жизнедеятельности человека в техносфере; – идентификация ...
0 комментариев