Навигация
Анализ исполнительных органов
18105
знаков
2
таблицы
19
изображений
1.3.2 Анализ исполнительных органов
А) Дорожки. Их движение будет реверсивным по возможности. Передаваться движение будет от двигателя через косоугольные шестерни. Реверс желателен при выполнении программы вначале и конце обработки 1й палки колбасы для сброса в корзину отходов «хвостиков».
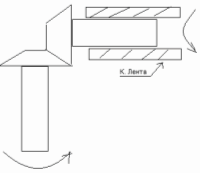
Рисунок 1.3 Схематическое изображение передачи движения через косоугольные шестерни на конвейерную ленту
Б) Поворот тарелки будет осуществляться шаговым двигателем через цепную передачу, возможен варианта встраивания его непосредственно в сервировочное устройство.
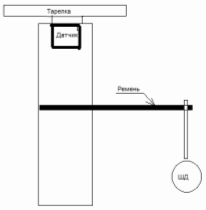
Рисунок 1.4 Поворотный механизм с датчиком
В) «Прижиматель»- представляет собой прижимную лопатку на одном конце которой закреплен оптодатчик наличия колбасы. Движение передается от ДПТ через шестерню на валу к зубцам на «хвосте» прижимной лопатки.
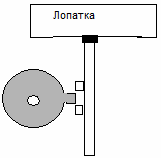
Рисунок 1.5 Передача движения от двигателя к прижимной лопатке. Вид сверху.
В исходное положение лопатка будет возвращаться после прекращения действия ДПТ под действием деформированной пружины, прикрепленной к вращающей шестерне.
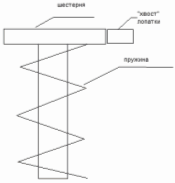
Рисунок 1.6 Пружина как возвратный механизм. Вид сбоку.
Г) Двигатель движения ножа по направляющей. Реагирует на сигналы концевых датчиков. Сам нож с вращающим его двигателем перемещается по червячной передаче.
Д) Двигатель вращения ножа - получает сигнал от контроллера о включении/отключении. Вращает нож с переменной скоростью. Управляется ШИМ, реализованным на таймере счетчике.
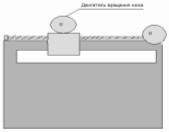
Рисунок 1.7 Механизм перемещения ножа
1.3.3 Анализ СУ
СУ может быть реализована как аппарат с жесткой логикой Мили/мура, как релейно-контакторная схема, но оптимальный вариант это реализация на контроллере ARM7.Именно этот вариант позволит более точно настроить и отладить систему, а также упростит автоматизацию ряда узлов – задней стенки и т .д. Для упрощения реализации проекта контроллер LPC2138 будет взят не как отдельный элемент, а уже в виде готового к монтажу модуля MMLPC2138-0-2.
MMLPC2138-0-2 – миниатюрный модуль с установленным 32-разрядным ARM микроконтроллером LPC2138 NXP. Все выводы микроконтроллера доступны на разъемах платы. Периферия включает два таймера, два интерфейса UART, два I2C, SPI, АЦП, ЦАП, сорок семь линий ввода/вывода.
Отличительные особенности· установленный микроконтроллер LPC2138: ARM7TDMI-S™ 16/32 бит, 512 кБ Flash-памяти программ, 32 кБ ОЗУ, часы реального времени, восемь 10-битных АЦП, 2 порта UART, I2C, SPI, два 32-битных таймера, восемь каналов захвата/хранения, ШИМ (6 выходов), "WatchDogTimer", 5 В совместимые входы/выходы, работоспособность до 60 МГц (встроенный PLL);
· последовательная DataFlash на 32Mb (4MB);
· часы РВ с встроенным резонатором 32,768кГц и батареей (устанавливается дополнительно);
· питание 3,3В или 3,8 – 16В от встроенного регулятора;
· компактные размеры 39х36мм;
· работает в комплексе с отладочной платой EVBlpc213x;
· отладочный интерфейс JTAG.
Комплектация· отладочная плата MMLPC2138-0-2.
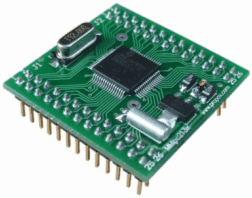
Рисунок 1.8 MMLPC2138-0-2
1.4 Постановка задачи проектирования
Проанализировав вышеизложенный материал, были сформулированы следующие задачи данной курсовой работы:
– разработка структуры системы управления подсистемами
– выбор датчиков тока, угла поворота, скорости, преобразователя частоты;
– выбор исполнительных устройств (электродвигателей);
–разработка схемы подключения датчиков и исполнительных механизмов;
– разработка пользовательского интерфейса с индикацией;
–разработка блок–схемы алгоритмов программы управления микроконтроллером;
– разработка программы управления на языке Keil.
2. ПРОЕКТИРОВАНИЕ СТРУКТУРЫ СИСТЕМЫ
2.1 Структурная схема подключения датчиков
Датчик (сенсор от англ. sensor) — термин систем управления, первичный преобразователь, элемент измерительного, сигнального, регулирующего или управляющего устройства системы, преобразующий контролируемую величину в удобный для использования сигнал.
В настоящее время различные датчики широко используются при построении систем автоматизированного управления.
ДСТ
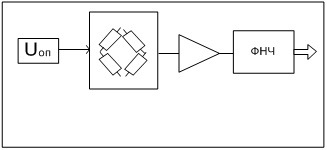
Рисунок 2.1 Структурная схема подключения ДСТ
Датчик подключается через усилитель и фильтр низких частот к АЦП МК. Обработка информации от него подробнее расписана в блок-схеме к управляющей программе.
Оптодатчик
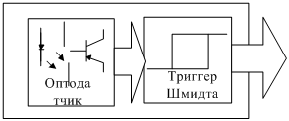
Рисунок 2.2 Структурная схема подключения Оптодатчика.
Оптодатчик состоит из оптопары и триггера Шмидта. Подключается непосредственно к GPIO МК. Наиболее распространенный в рассматриваемой системе тип датчика. Следует заметить что при срабатывании датчик выдает сигнал 0, постоянный же уровень сигнала от него логическая еденица, однако при разработке управляющей программы была использована обратная логика, а следовательно сигнал с данных датчиков после триггера Шмидта также следует пропускать через инвертор, разумеется если инвертор уже не встроен в него.
Кнопки
Рисунок 2.3 Кнопка нажимного типа.
Хотя это не датчики, рациональнее всего отнести кнопки к этому разделу, ведь как и датчики они подают (точнее пропускают) сигнал на входы МК, что позволяет ему скорректировать производственный процесс соответственно вновь поступившим данным.
Похожие работы
... предприятие уделяет достаточно много внимания для ее исследования и формирования. Об этом можно судить, прежде всего, по высокому качеству и разнообразию ассортимента выпускаемой продукции, что значительно повышает их конкурентоспособность на рынке. Постоянно модифицируется и усовершенствуется упаковка изделий, становясь более красочной и привлекательной для покупателей. Благодаря эффективному ...
0 комментариев