Навигация
Структурная схема подключения исполнительных механизмов
18105
знаков
2
таблицы
19
изображений
2.2 Структурная схема подключения исполнительных механизмов
Двигатель перемещения ножа
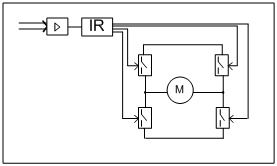
Рисунок 2.4 Двигатель перемещения ножа
Поскольку необходимо обеспечить перемещение ножа в обоих направлениях, данный двигатель подключен с возможностью реверса. Возможна реализация на транзисторах работающих в ключевом режиме либо на них же, но также с использованием микросхем IR.
Двигатель поворота тарелки/ перемещения задней стенки (ШД)
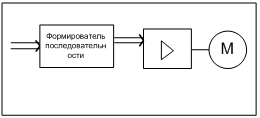
Рисунок 2.5 Управление ШД
Данный тип двигателя подключен к МК через 2 специализированные микросхемы L297+L298, которые в паре составляют драйвер управления шаговым двигателем. Благодаря им попеременно происходит включение обмоток ШД, что приводит к вращению. Управлять двигателем так очень просто. Необходимо лишь подать с МК 3 сигнала. 1й включает двигатель. 2й задает прямой либо обратный ход. 3й активирует режим полушага. На микросхему L297 также необходимо подавать прямоугольные импульсы. Для снижения нагрузки на МК подача данных импульсов идет со стороннего генератора, реализованного на микросхеме 555.
Двигатель вращения ножа/ прижимной лопатки/ конвейерных лент
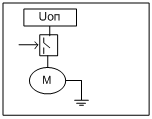
Рисунок 2.6 Структурная схема подключения других ДПТ
МК подает сигнал на ключ через который подается напряжение питания данных двигателей. Подробнее их управление будет рассмотрено в главе о блок-схеме.
Источники питания
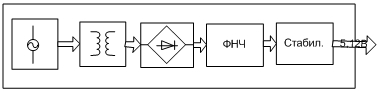
Рисунок 2.7 Кнопка нажимного типа.
Хотя источники питания не относятся к исполнительным механизмам они будут упомянуты в этом разделе, ведь без них не будет функционировать система вцелом. Основные элементы блока питания это трансформатор, выпрямитель, ФНЧ и стабилизатор. По желанию можно добавить предохранители. Подробнее схема БП будет рассмотрена при проектировке модели. Следует отметить что для системы необходимо 2 БП на 5 и на 12В постоянного тока.
Индикация
Еще одним важным звеном являются семисегментные индикаторы, которые наглядно показывают состояние системы, а точнее ее настройки. Подключаются они напрямую к GPIO МК.
2.3 Распределение пинов МК
Таблица 2.1 Пины МК
| Порт/пин | Назначение | IODIR | Pinsel |
| P0.0 | Пуск системы | ||
| P0.1 | Стоп | EINT0 | |
| P0.2 | Двигатель прижима | + | |
| P0.3 | Датчик наличия колбасы | ||
| P0.4 | Искусственный стоп | + | |
| P0.5-0.8 | Индикатор скорости | + | |
| P0.9 | Регулятор скорости | EINT3 | |
| P0.10-0.13 | Индикатор положения задней стенки | + | |
| P0.14-0.15 | Смещение стенки вперед/ назад. | EINT1 EINT2 | |
| P0.16-0.17 | Управление конвейерными лентами | + | |
| P0.19-0.20 | Концевые датчики положений ножа | ||
| P0.21 | Управление вращением ножа | + | |
| P0.22-0.23 | Смещение ножа вправо/влево | + | |
| P0.27 | АЦП. Сигнал от датчика давления | AD0/0 | |
| P0.28-0.30 | Управление ШД поворота тарелки. | + | |
| P1.16-1.18 | Управление ШД движения задней стенки. | + | |
| P1.20-1.31 | Датчики положения задней стенки |
3. ПРОЕКТИРОВАНИЕ МОДЕЛИ СИСТЕМЫ В СРЕДЕ PROTEUS
3.1 Проектирование моделей датчиков
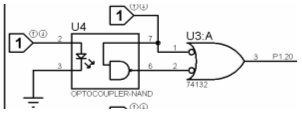
Рисунок 3.1 Оптодатчик
Состоит из элемента который выполняет модель оптопары, а также триггера Шмидта совмещенного с лог. элементом.

Рисунок 3.2 Модель датчика веса
Состоит из резистора с переменным сопротивлением и ФНЧ (резистор +конденсатор). Подключается к АЦП.
Похожие работы
... предприятие уделяет достаточно много внимания для ее исследования и формирования. Об этом можно судить, прежде всего, по высокому качеству и разнообразию ассортимента выпускаемой продукции, что значительно повышает их конкурентоспособность на рынке. Постоянно модифицируется и усовершенствуется упаковка изделий, становясь более красочной и привлекательной для покупателей. Благодаря эффективному ...
0 комментариев