Уральский Государственный Технический Университет
УПИ
Кафедра электрических машин
Контрольная работа
Расчет электромеханических характеристик частотно-регулируемого асинхронного двигателя
Выполнил: Студент гр.
Проверил: Старший преподаватель
2005 г.
Расчет электромеханических характеристик частотно-регулируемого асинхронного двигателя
Частотное регулирование асинхронного двигателя применяется в тех случаях, когда требуется плавно и в широких пределах регулировать частоту вращения и электромагнитный момент двигателя. При этом, как правило, требуется обеспечить благоприятные условия работы двигателя по магнитному потоку и току, не допуская снижения его перегрузочной способности.
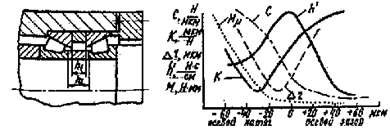
Простейший анализ рабочих режимов асинхронного двигателя при частотном регулировании можно выполнить с помощью его схемы замещения (рис.1).
|
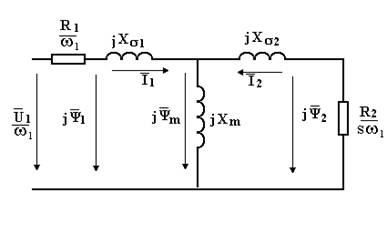
Рис. 1. Схема замещения асинхронного двигателя.
Существует несколько подходов к формированию третьего условия, вытекающих из стремления обеспечить экономичный режим работы двигателя. Наиболее часто используется одно из следующих условий:
1. ![]()
2. ![]()
3. ![]()
4. ![]()
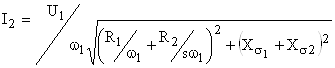
Эти условия получили название законов управления. Выбор рационального закона управления для конкретного типа электропривода осуществляется на основе анализа электромеханических характеристик двигателя. В табл.1 приведены формулы для расчета тока ротора для каждого из рассматриваемых законов
Таблица 1
| Закон | Ток ротора |
|
|
|
|
|
|
|
|
|
|
|
|
Исходные данные для расчета.
Параметры базового двигателя
![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
; ![]()
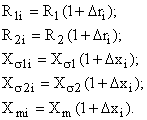
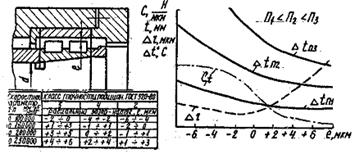
Отклонения параметров i-варианта от параметров базового приведены в табл. 1.
Таблица 2
|
| +0.1 | +0.05 | 0 | -0.05 | -0.1 |
| -0.15 | 1 | 7 | 13 | 19 | 25 |
| -0.1 | 2 | 8 | 14 | 20 | 26 |
| -0.05 | 3 | 9 | 15 | 21 | 27 |
| +0.05 | 4 | 10 | 16 | 22 | 28 |
| +0.1 | 5 | 11 | 17 | 23 | 29 |
| +0.15 | 6 | 12 | 18 | 24 | 30 |
Параметры конкретного двигателя определяются по соотношениям:
Задание 1. Рассчитать механические характеристики двигателя ![]() для четырех законов управления. Расчеты выполнить для следующих значений частот питающего напряжения
для четырех законов управления. Расчеты выполнить для следующих значений частот питающего напряжения ![]() , варьируя скольжение
, варьируя скольжение ![]() от 0 до 1.0 . Результаты расчетов свести в таблицы.
от 0 до 1.0 . Результаты расчетов свести в таблицы.
По результатам расчетов для каждого закона управления построить на отдельном графике семейство механических характеристик ![]() при частотах
при частотах ![]() . Из полученных характеристик для каждой частоты
. Из полученных характеристик для каждой частоты ![]() определить скольжение
определить скольжение ![]() , соответствующее номинальному моменту
, соответствующее номинальному моменту ![]()
Закон№1 Согласно данным соотношениям, рабочий процесс двигателя определяются тремя переменными: частотой питающего напряжения ![]() ; модулем питающего напряжения
; модулем питающего напряжения ![]() и частотой скольжения ротора
и частотой скольжения ротора ![]() . Выбор этих переменных осуществляется исходя из требований получения заданной частоты вращения ротора
. Выбор этих переменных осуществляется исходя из требований получения заданной частоты вращения ротора
Схема замещения позволяет, используя методы теории электрических цепей, рассчитать следующие величины:
Модуль напряжения статора при первом законе управления изменяется пропорционально частоте:
![]()
-ток ротора
 (1)
(1)
электромагнитного момента
![]() .
.
![]()
Таблица _1.1__
Закон управления ______1______. Частота ![]() ____1.5____
____1.5____
| s | 1.0 | 0.8 | 0.6 | 0.4 | 0.2 | 0.1 |
|
| 1.5 | 1.2 | 0.9 | 0.6 | 0.3 | 0.15 |
|
| 0 | 0.3 | 0.6 | 0.9 | 1.2 | 1.35 |
|
| 5.87 | 5.84 | 5.79 | 5.68 | 5.22 | 4.17 |
|
| 0.54 | 0.67 | 0.88 | 1.27 | 2.15 | 2.75 |
Таблица _1.2__
Закон управления ______1______. Частота ![]() ____1.0____
____1.0____
| s | 1.0 | 0.8 | 0.6 | 0.4 | 0.2 | 0.1 |
|
| 1.0 | 0.8 | 0.6 | 0.4 | 0.2 | 0.1 |
|
| 0 | 0.2 | 0.4 | 0.6 | 0.8 | 0.9 |
|
| 5.81 | 5.77 | 5.68 | 5.47 | 4.69 | 3.32 |
|
| 0.8 | 0.99 | 1.27 | 1.77 | 2.61 | 2.62 |
Таблица _1.3__
Закон управления ______1______. Частота ![]() ____0.5____
____0.5____
| s | 1.0 | 0.8 | 0.6 | 0.4 | 0.2 | 0.1 |
|
| 0.5 | 0.4 | 0.3 | 0.2 | 0.1 | 0.05 |
|
| 0 | 0.1 | 0.2 | 0.3 | 0.4 | 0.45 |
|
| 5.6 | 5.47 | 5.22 | 4.69 | 3.32 | 1.94 |
|
| 1.49 | 1.77 | 2.16 | 2.61 | 2.62 | 1.79 |
Таблица _1.4__
Закон управления ______1______. Частота ![]() ____0.2____
____0.2____
| s | 1.0 | 0.8 | 0.6 | 0.4 | 0.2 | 0.1 |
|
| 0.2 | 0.16 | 0.12 | 0.08 | 0.04 | 0.02 |
|
| 0 | 0.04 | 0.08 | 0.12 | 0.16 | 0.18 |
|
| 4.69 | 4.29 | 3.71 | 2.84 | 1.59 | 0.83 |
|
| 2.61 | 2.73 | 2.72 | 2.39 | 1.5 | 0.82 |
Таблица _1.5__
Закон управления ______1______. Частота ![]() ____0.1____
____0.1____
| s | 1.0 | 0.8 | 0.6 | 0.4 | 0.2 | 0.1 |
|
| 0.1 | 0.08 | 0.06 | 0.04 | 0.02 | 0.01 |
|
| 0 | 0.02 | 0.04 | 0.06 | 0.08 | 0.09 |
|
| 3.31 | 2.83 | 2.26 | 1.59 | 0.75 | 0.42 |
|
| 2.6 | 2.38 | 2.02 | 1.5 | 0.66 | 0.41 |
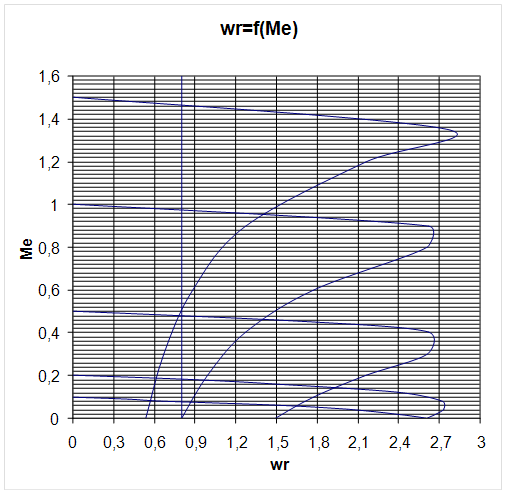
Рис1.1
Закон №2
-полное потокосцепление обмотки статора
 ; (2)
; (2)
![]()
Таблица _1.6__
Закон управления ______2______. Частота ![]() ____1.5____
____1.5____
| s | 1.0 | 0.8 | 0.6 | 0.4 | 0.2 | 0.1 |
|
| 1.5 | 1.2 | 0.9 | 0.6 | 0.3 | 0.15 |
|
| 0 | 0.3 | 0.6 | 0.9 | 1.2 | 1.35 |
|
| 5.92 | 5.91 | 5.88 | 5.79 | 5.38 | 4.33 |
|
| 0.55 | 0.69 | 0.91 | 1.32 | 2.29 | 2.97 |
Таблица _1.7__
Закон управления ______2______. Частота ![]() ____1.0____
____1.0____
| s | 1.0 | 0.8 | 0.6 | 0.4 | 0.2 | 0.1 |
|
| 1.0 | 0.8 | 0.6 | 0.4 | 0.2 | 0.1 |
|
| 0 | 0.2 | 0.4 | 0.6 | 0.8 | 0.9 |
|
| 5.89 | 5.86 | 5.79 | 5.61 | 4.86 | 3.43 |
|
| 0.82 | 1.03 | 1.33 | 1.86 | 2.8 | 2.79 |
Таблица _1.8__
Закон управления ______2______. Частота ![]() ____0.5____
____0.5____
| s | 1.0 | 0.8 | 0.6 | 0.4 | 0.2 | 0.1 |
|
| 0.5 | 0.4 | 0.3 | 0.2 | 0.1 | 0.05 |
|
| 0 | 0.1 | 0.2 | 0.3 | 0.4 | 0.45 |
|
| 5.72 | 5.61 | 5.38 | 4.86 | 3.43 | 1.98 |
|
| 1.55 | 1.86 | 2.29 | 2.8 | 2.79 | 1.86 |
Таблица _1.9__
Закон управления ______2______. Частота ![]() ____0.2____
____0.2____
| s | 1.0 | 0.8 | 0.6 | 0.4 | 0.2 | 0.1 |
|
| 0.2 | 0.16 | 0.12 | 0.08 | 0.04 | 0.02 |
|
| 0 | 0.04 | 0.08 | 0.12 | 0.16 | 0.18 |
|
| 3.43 | 4.46 | 3.85 | 2.93 | 1.62 | 0.83 |
|
| 2.79 | 2.95 | 2.93 | 2.54 | 1.55 | 0.82 |
Таблица _1.10__
Закон управления ______2______. Частота ![]() ____0.1____
____0.1____
| s | 1.0 | 0.8 | 0.6 | 0.4 | 0.2 | 0.1 |
|
| 0.1 | 0.08 | 0.06 | 0.04 | 0.02 | 0.01 |
|
| 0 | 0.02 | 0.04 | 0.06 | 0.08 | 0.09 |
|
| 3.43 | 2.93 | 2.33 | 1.62 | 0.83 | 0.42 |
|
| 2.79 | 2.54 | 2.15 | 1.55 | 0.82 | 0.41 |
Wr=f(Me)
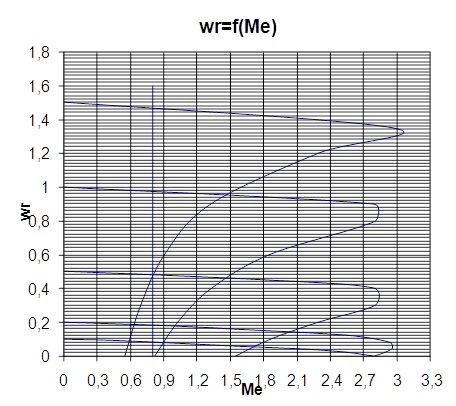
Рис1.2
Закон №3
- потокосцепление взаимоиндукции
 ; (3)
; (3)
![]()
-ток ротора
Таблица _1.11__
Закон управления ______3______. Частота ![]() ____1.5____
____1.5____
| s | 1.0 | 0.8 | 0.6 | 0.4 | 0.2 | 0.1 |
|
| 1.5 | 1.2 | 0.9 | 0.6 | 0.3 | 0.15 |
|
| 0 | 0.3 | 0.6 | 0.9 | 1.2 | 1.35 |
|
| 10.4 | 10.35 | 10.19 | 9.76 | 8.11 | 5.42 |
|
| 1.71 | 2.12 | 2.74 | 3.77 | 5.20 | 4.65 |
Таблица _1.12__
Закон управления ______3______. Частота ![]() ____1.0____
____1.0____
| s | 1.0 | 0.8 | 0.6 | 0.4 | 0.2 | 0.1 |
|
| 1.0 | 0.8 | 0.6 | 0.4 | 0.2 | 0.1 |
|
| 0 | 0.2 | 0.4 | 0.6 | 0.8 | 0.9 |
|
| 10.26 | 10.1 | 9.76 | 8.96 | 6.59 | 3.91 |
|
| 2.5 | 3.03 | 3.77 | 4.76 | 5.15 | 3.63 |
Таблица _1.13__
Закон управления ______3______. Частота ![]() ____0.5____
____0.5____
| s | 1.0 | 0.8 | 0.6 | 0.4 | 0.2 | 0.1 |
|
| 0.5 | 0.4 | 0.3 | 0.2 | 0.1 | 0.05 |
|
| 0 | 0.1 | 0.2 | 0.3 | 0.4 | 0.45 |
|
| 9.45 | 8.96 | 8.11 | 6.59 | 3.91 | 2.06 |
|
| 4.24 | 4.76 | 5.20 | 5.15 | 3.63 | 2.02 |
Таблица _1.14__
Закон управления ______3______. Частота ![]() ____0.2____
____0.2____
| s | 1.0 | 0.8 | 0.6 | 0.4 | 0.2 | 0.1 |
|
| 0.2 | 0.16 | 0.12 | 0.08 | 0.04 | 0.02 |
|
| 0 | 0.04 | 0.08 | 0.12 | 0.16 | 0.18 |
|
| 6.59 | 5.68 | 4.56 | 3.21 | 1.66 | 0.84 |
|
| 5.15 | 4.79 | 4.12 | 3.06 | 1.64 | 0.84 |
Таблица _1.15__
Закон управления ______3______. Частота ![]() ____0.1____
____0.1____
| s | 1.0 | 0.8 | 0.6 | 0.4 | 0.2 | 0.1 |
|
| 0.1 | 0.08 | 0.06 | 0.04 | 0.02 | 0.01 |
|
| 0 | 0.02 | 0.04 | 0.06 | 0.08 | 0.09 |
|
| 2.06 | 3.21 | 2.45 | 1.66 | 0.84 | 0.42 |
|
| 2.02 | 3.06 | 2.38 | 1.64 | 0.84 | 0.42 |
Wr=f(Me)
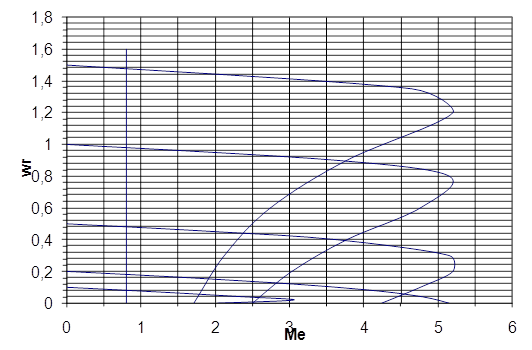
Рис1.3
Закон №4
-полное потокосцепление обмотки ротора
![]() ; (4)
; (4)
![]()
-ток ротора
Таблица _1.16__
Закон управления ______4______. Частота ![]() ____1.5____
____1.5____
| s | 1.0 | 0.8 | 0.6 | 0.4 | 0.2 | 0.1 |
|
| 1.5 | 1.2 | 0.9 | 0.6 | 0.3 | 0.15 |
|
| 0 | 0.3 | 0.6 | 0.9 | 1.2 | 1.35 |
|
| 63.24 | 50.52 | 37.89 | 25.26 | 12.63 | 6.32 |
|
| 63.24 | 50.52 | 37.89 | 25.26 | 12.63 | 6.32 |
Таблица _1.17__
Закон управления ______4______. Частота ![]() ____1.0____
____1.0____
| s | 1.0 | 0.8 | 0.6 | 0.4 | 0.2 | 0.1 |
|
| 1.0 | 0.8 | 0.6 | 0.4 | 0.2 | 0.1 |
|
| 0 | 0.2 | 0.4 | 0.6 | 0.8 | 0.9 |
|
| 42.11 | 33.68 | 25.26 | 16.84 | 8.42 | 4.2 |
|
| 42.11 | 33.68 | 25.26 | 16.84 | 8.42 | 2.38 |
Таблица _1.18__
Закон управления ______4______. Частота ![]() ____0.5____
____0.5____
| s | 1.0 | 0.8 | 0.6 | 0.4 | 0.2 | 0.1 |
|
| 0.5 | 0.4 | 0.3 | 0.2 | 0.1 | 0.05 |
|
| 0 | 0.1 | 0.2 | 0.3 | 0.4 | 0.45 |
|
| 21.05 | 16.84 | 12.63 | 8.42 | 4,2. | 2.11 |
|
| 21.04 | 16.84 | 12.63 | 8.42 | 4,2 | 2.11 |
Таблица _1.19__
Закон управления ______4______. Частота ![]() ____0.2____
____0.2____
| s | 1.0 | 0.8 | 0.6 | 0.4 | 0.2 | 0.1 |
|
| 0.2 | 0.16 | 0.12 | 0.08 | 0.04 | 0.02 |
|
| 0 | 0.04 | 0.08 | 0.12 | 0.16 | 0.18 |
|
| 8.42 | 6.74 | 5.05 | 3.37 | 1.68 | 0.84 |
|
| 8.42 | 6.74 | 5.05 | 3.37 | 1.68 | 0.84 |
Таблица _1.20__
Закон управления ______4______. Частота ![]() ____0.1____
____0.1____
| s | 1.0 | 0.8 | 0.6 | 0.4 | 0.2 | 0.1 |
|
| 0.1 | 0.08 | 0.06 | 0.04 | 0.02 | 0.01 |
|
| 0 | 0.02 | 0.04 | 0.06 | 0.08 | 0.09 |
|
| 4.2 | 3.37 | 2.52 | 1.68 | 0.84 | 0.42 |
|
| 4.2 | 3.37 | 2.52 | 1.68 | 0.84 | 0.42 |
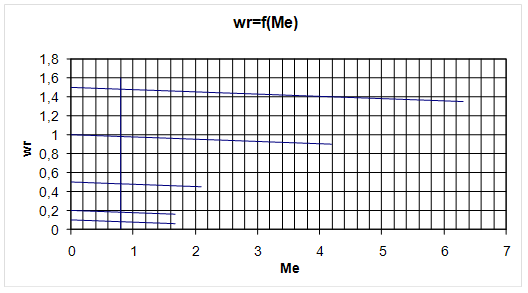
Рис 1-4
Находим ![]()
wr=w1-w2 w2=w1-wr w2=sн·w1 ![]()
Закон №1
При w1=1.5; wr=1.48о.е w2=0.02 sн= 0.013
w1=1.0; wr=0.98о.е w2=0.02 sн=0.02
w1=0.5; wr=0.48о.е w2=0.02 sн=0.04
w1=0.2; wr=0.18о.е w2=0.02 sн=0.1
w1=0.1; wr=0.08о.е w2=0.02 sн=0.2
Закон №2
При w1=1.5; wr=1.48о.е w2=0.02 sн= 0.013
w1=1.0; wr=0.98о.е w2=0.02 sн=0.02
w1=0.5; wr=0.48о.е w2=0.02 sн=0.04
w1=0.2; wr=0.18о.е w2=0.02 sн=0.1
w1=0.1; wr=0.08о.е w2=0.02 sн=0.2
Закон №3
При w1=1.5; wr=1.48о.е w2=0.02 sн= 0.013
w1=1.0; wr=0.98о.е w2=0.02 sн=0.02
w1=0.5; wr=0.48о.е w2=0.02 sн=0.04
w1=0.2; wr=0.18о.е w2=0.02 sн=0.1
w1=0.1; wr=0.08о.е w2=0.02 sн=0.2
Закон №4
При w1=1.5; wr=1.48о.е w2=0.02 sн= 0.013
w1=1.0; wr=0.98о.е w2=0.02 sн=0.02
w1=0.5; wr=0.48о.е w2=0.02 sн=0.04
w1=0.2; wr=0.18о.е w2=0.02 sн=0.1
w1=0.1; wr=0.08о.е w2=0.02 sн=0.2
Задание 2
Рассчитать электромеханические характеристики двигателя ![]() при номинальном скольжении
при номинальном скольжении ![]() для четырех законов управления. Результаты расчетов свести в таблицы
для четырех законов управления. Результаты расчетов свести в таблицы
напряжения статора при первом законе управления
![]()
при 2,3,4 законах напряжениеU1 рассчитывается по формуле:

- ток статора
 ; (5)
; (5)
-полное потокосцепление обмотки статора
; (2)
-полное потокосцепление обмотки ротора
![]() ; (4)
; (4)
- потокосцепление взаимоиндукции
; (3)
Закон №1
Таблица _2.1__
Закон управления ____1____.
|
| 1.5 | 1.0 | 0.5 | 0.2 | 0.1 |
|
| 0.013 | 0.02 | 0.04 | 0.1 | 0.2 |
|
| 0.02 | 0.02 | 0.02 | 0.02 | 0.02 |
|
| 0.825 | 0.821 | 0.801 | 0.773 | 0.721 |
|
| 1.5 | 1 | 0.5 | 0.2 | 0.1 |
|
| 0.99 | 0.985 | 0.975 | 0.97 | 0.864 |
|
| 0.983 | 0.978 | 0.963 | 0.921 | 0.858 |
|
| 0.98 | 0.975 | 0.96 | 0.918 | 0.856 |
|
| 0.236 | 0.234 | 0.233 | 0.221 | 0.206 |
Законы №2,3,4 Таблица _2.2__
Закон управления ____2____.
|
| 1.5 | 1.0 | 0.5 | 0.2 | 0.1 |
|
| 0.013 | 0.02 | 0.04 | 0.1 | 0.2 |
|
| 0.02 | 0.02 | 0.02 | 0.02 | 0.02 |
|
| 0.834 | 0.834 | 0.834 | 0.834 | 0.834 |
|
| 1.516 | 1.016 | 0.516 | 0.216 | 0.116 |
|
| 1.0 | 1.0 | 1.0 | 1.0 | 1.0 |
|
| 0.993 | 0.993 | 0.993 | 0.993 | 0.993 |
|
| 0.94 | 0.94 | 0.94 | 0.94 | 0.94 |
|
| 0.238 | 0.238 | 0.238 | 0.238 | 0.238 |
Таблица _2.3__
Закон управления ____3____.
|
| 1.5 | 1.0 | 0.5 | 0.2 | 0.1 |
|
| 0.013 | 0.02 | 0.04 | 0.1 | 0.2 |
|
| 0.02 | 0.02 | 0.02 | 0.02 | 0.02 |
|
| 0.834 | 0.834 | 0.834 | 0.834 | 0.834 |
|
| 1.516 | 1.016 | 0.516 | 0.216 | 0.116 |
|
| 1.0 | 1.0 | 1.0 | 1.0 | 1.0 |
|
| 0.993 | 0.993 | 0.993 | 0.993 | 0.993 |
|
| 0.94 | 0.94 | 0.94 | 0.94 | 0.94 |
|
| 0.238 | 0.238 | 0.238 | 0.238 | 0.238 |
Таблица _2.4__
Закон управления ____4____.
|
| 1.5 | 1.0 | 0.5 | 0.2 | 0.1 |
|
| 0.013 | 0.02 | 0.04 | 0.1 | 0.2 |
|
| 0.02 | 0.02 | 0.02 | 0.02 | 0.02 |
|
| 0.834 | 0.834 | 0.834 | 0.834 | 0.834 |
|
| 1.516 | 1.016 | 0.516 | 0.216 | 0.116 |
|
| 1.0 | 1.0 | 1.0 | 1.0 | 1.0 |
|
| 0.993 | 0.993 | 0.993 | 0.993 | 0.993 |
|
| 0.94 | 0.94 | 0.94 | 0.94 | 0.94 |
|
| 0.238 | 0.238 | 0.238 | 0.238 | 0.238 |
По результатам расчетов на отдельном графике для четырех законов управления строим электромеханические характеристики ![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
; ![]() и выполнить их анализ.
и выполнить их анализ.
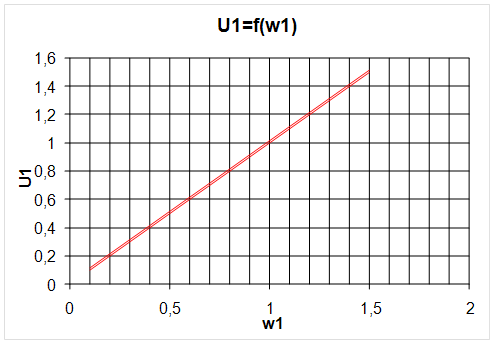
Рис2-1
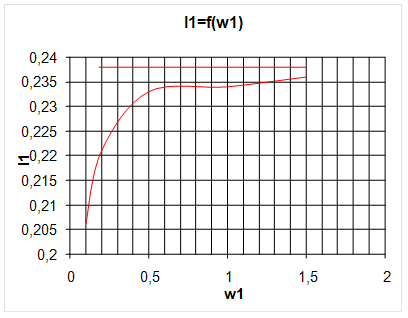
Рис2-2
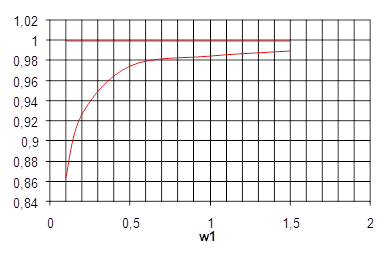
Рис 2-3
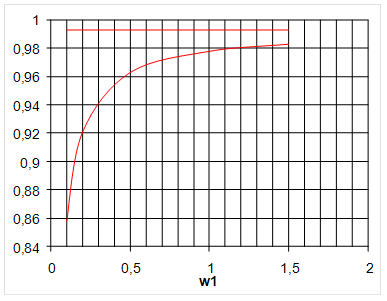
Рис 2-4
Похожие работы





... . Целью дипломного проекта является разработка и исследование автоматической системы регулирования (АСР) асинхронного высоковольтного электропривода на базе автономного инвертора тока с трехфазным однообмоточным двигателем с детальной разработкой программы высокого уровня при различных законах управления. В ходе конкретизации из поставленной цели выделены следующие задачи. Провести анализ ...
... b = a(t2) + g(t2) = w0× t + g 2. ТЕХНИЧЕСКОЕ ЗАДАНИЕ 2.1 Наименование и область применения Разрабатываемое устройство называется: автоматическая система управления асинхронным двигателем. Область применения разрабатываемого устройства не ограничивается горнодобывающей промышленностью и может использоваться на любых предприятиях для управления машинами с асинхронным приводом. 2.2 Основание для ...





... о выборе лучшего варианта привода принимается на основе сопоставления приведенных затрат на одинаковый объем выпускаемой продукции. В данном проекте необходимо обеспечить регулирование продолжительности времени выпечки с коррекцией по температуре во второй зоне пекарной камеры. При этом необходимо учитывать, что производительность печи при замене системы привода меняться не должна, а также ...
... . Это позволяет: -снизить трудоемкость обработки -снизить себестоимость обработки -сократить время обработки и обслуживания. Ожидаемый частный годовой экономический эффект от автоматизации шлифовального процесса путем разработки автоматической системы управления параметров станка является снижение затрат на обработку детали типа кольцо ступенчатое при годовой программе выпуска 1000 ед. ...
0 комментариев