ВИДИ РОБІТ ПРИ ПАТЕНТНИХ ДОСЛІДЖЕННЯХ ОБ’ЄКТУ ГОСПОДАРСЬКОЇ ДІЯЛЬНОСТІ НА СТАДІЇ ЖИТТЄВОГО ЦИКЛУ "РОЗРОБЛЕННЯ ОГД"
Виявлення об’єктів промислової власності в об’єкті господарської діяльності “Машина для виймання анодних штирів алюмінієвого електролізера”
Визначення патентоспроможності промислового зразка
Корисна модель визнається промислово придатним, якщо його може бути використано у промисловості або в іншій сферідіяльності
Винахідник подає роботодавцю письмове повідомлення про створений ним об'єкт з описом, що розкриває ясно і повно суть винаходу
Графічні зображення
Опис
Формула корисної моделі
Заява про видачу патенту
Опис
Потік подій для прецеденту «Друк»
Визначення прибутку, одержуваного від використання корисної моделі „Машина для виймання анодних штирів алюмінієвого електролізера”
Заохочувальна винагорода
ЦИВІЛЬНА ОБОРОНА
Сутність системи лікувально-евакуаційного забезпечення уражених
Навигация
Складання патенто-правових документів на "Машину для виймання анодних штирів алюмінієвого електролізера"
Складання патенто-правових документів на "Машину для виймання анодних штирів алюмінієвого електролізера"
158711
знаков
31
таблица
11
изображений
ВСТУП
Одним з основних показників цивілізованості суспільства в усі часи була і залишається увага, яка приділяється в ньому розвитку науки, культури і техніки. Від того наскільки значним є інтелектуальний потенціал суспільства і рівень його культурного розвитку, залежить успіх розв’язання посталих перед ним економічних проблем.
Технологічно провідні країни світу останніми роками в основу своєї економічної ( а в ряді випадків і політичної) стратегії на перші позиції поставили науку та її результати як основу основ базису високих технологій.
Розвиток інтелектуальної діяльності та її результатів – інтелектуальної власності в цілому світі засвідчив їх, безперечно, чи не найвагоміше значення для соціально-економічного зростання будь-якої країни, в тому числі і для України. Проте пріоритетне значення цих факторів має бути визнано не на словах, а на ділі.
Пріоритетність інтелектуальної діяльності та її результатів – інтелектуальної власності має бути офіційно визнаною на вищому державному рівні з відповідним матеріально-фінансовим забезпеченням. Інтелектуальна діяльність за сучасних умов є суб’єктивно необхідним процесом, і будь-яка держава, суспільство обминути його не зможе. Світовий досвід показує, що там, де вищий рівень інтелектуальної діяльності, там більш успішно розвивається виробництво та інші види соціально-економічної діяльності.
Високий рівень інтелектуальної діяльності – це суверенітет держави, її політична, економічна, територіальна та будь-яка інша незалежність. Це авторитет держави в міжнародних відносинах, її престиж. Нарешті, високий рівень інтелектуальної діяльності – це високий рівень добробуту народу, заради чого кажучи, здійснюється ця діяльність.
Тема дипломної роботи є актуальною, як в галузі промисловості щодо обладнання для виробництва первинного алюмінію, так і значенням патентних досліджень в визначенні охороноздатності об’єктів промислової власності в процесі проведення дослідно – конструкторських робіт. Правова охорона технічних рішень, а також художньо – конструкторських рішень, що використані в розроблених ОГД сприяє підвищеню їх конкурентоспроможності, а також відкриває можливості реалізації виключних прав шляхом ліцензування, що дуже важливо в умовах формування в Україні ринку ІВ.
Метою дипломної роботи є розробка патентно-правових документів, які пов’язані з виявленням охороноздатних об’єктів права ІВ, врегулюванням відносин суб’єктів права щодо майнових прав на службовий твір, а також документів щодо набуття прав, а саме: Звіт про патентні дослідження, заявка на промисловий зразок, заявка на корисну модель, повідомлення авторами роботодавця про створення корисної моделі, договор про передачу права на одержання патенту на корисну модель, договор між співавторами про вклад у створення та розподіл винагороди, що використаний в об’єкті господарської діяльності – “Машина для виймання анодних штирів алюмінієвого електролізера”
1. ХАРАКТЕРИСТИКА ОБ’ЄКТА ГОСПОДАРСЬКОЇ ДІЯЛЬНОСТІ "МАШИНА ДЛЯ ВИЙМАННЯ АНОДНИХ ШТИРІВ АЛЮМІНІЄВОГО ЕЛЕКТРОЛІЗЕРА" ЯК ОБ’ЄКТА ДОСЛІДЖЕННЯ”
1.1 Призначення машиниМашина для виймання анодних штирів алюмінієвого електролізера призначена для витягу штирів з анода алюмінієвих электролізерів з бічним підведенням струму.
Машина являє собою пневмогідравличну машину ненаголошеної дії (рис. 1).
Технічні дані:
Робочий тиск, мПа(кГс/див2) 0,4-0,63 (4-6,3)
Витрата повітря, м3/хв 5
Тиск масла в робітнику
циліндрі, мПа(кГс/див2), не менш 15 (150)
Діаметр робочого циліндра, мм 160
Хід упору робочого органа, мм 274±2
Зусилля що розвиває
на упорі, кН (кГс), не менш 300 (30000)
Маса машини, кг 1400
Габаритні розміри, мм:
довжина 2410
ширина 650
висота 1635
Швидкість пересування, км/год не більше 5
Припустимий кут повороту робочого органа
у горизонтальній площині від поздовжньої
осі, градус ±120
Склад машиниМашина складається з наступних складових частин: самохідного шасі, поворотної стовпчика, пневмогідроприводу, органів керування й сидіння.
1.1.1 Пристрій і робота машини і її складових частин 1.1.1.1 Пристрій і робота машиниПо конструктивному компонуванню (рис. 1) машина являє собою чотиреколесну самохідний візок - шасі, на рамі 21 якої встановлені передній - керований міст 20, задній - ведучий міст 18 і поворотний стовпчик 10. На колонку у свою чергу змонтований робочий орган 5, сидіння 12, пневмоциліндри підйому й подачі робочого органа, пневмодвигуна повороту стовпчика, органи керування.
Машина працює за рахунок енергії стисненого повітря, преутвореної пневмопривідом у поступальний рух машини й технологічні рухи поворотного стовпчика, робочого органа, витяг штирів з анода здійснюється ізвлікачем.
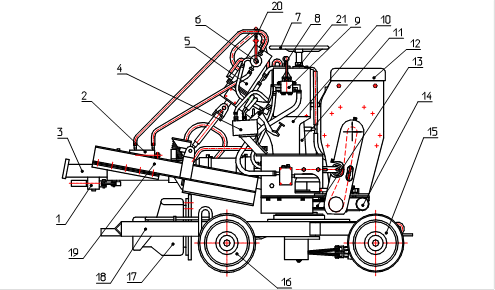
1-автоматичне захоплення; 2-пнемоцилиндр автоматичного захоплення; 3-робочий орган; 4-педальний золотник; 5-пневмоцилиндр підйому напрямних; 6-кран керування автоматичним захопленням; 7-кермове колесо; 8-кран керування роботою ізвлекателя; 9-золотник подачі робочого органа; 10-поворотний стовпчик; 11-стійка; 12-сидіння; 13-черв'ячне колесо; 14-теплообмінник; 15-керований міст; 16-провідний міст; 17-пневмодвигатель; 18-рама; 19-напрямна; 20-золотник підйому напрямної; 21-маслюка.
Схема пневмогідросистеми наведена на рис. 2.
Пневмогідросистема дозволяє здійснювати наступні операції:
-рух машини вперед, назад;
-повороти стовпчика вправо, уліво;
-підняття, опускання робочого органа;
-робота ізвлікачем.
Стиснене повітря з магістралі надходить у теплообмінник, з якого розподіляється в агрегати пневмогідропривода. При необхідності руху вперед або назад натискається права або ліва педаль лівого золотника ЗР1. При русі педалі спочатку відкривається випускний клапан золотника, що з'єднує магістраль, що відводить, пневмодвигуна Д1 з атмосферою, потім відкривається впускний клапан золотника з'єднуючу магістраль, що підводить, пневмодвигуна Д1 з теплообмінником.
При необхідності повороту стовпчика вправо або вліво натискається права або ліва педаль правого золотника ЗР2 при цьому стиснене повітря підводить до однієї з магістралей пневмодвигуна Д2. Плавність повороту стовпчика досягається за допомогою регулювання дроселя ДР3.
Для опускання або підняття напрямної впливають на рукоятку золотника З1, при цьому стиснене повітря підводить до верхньої або нижньої порожнини пневмоциліндра Ц1.
Для висування вперед або назад робітника органа впливають на рукоятку золотника З2, при цьому стиснене повітря підводить у штокову або поршневу порожнину пневмоциліндра подачі робочого органа Ц2. Плавність висування робочого органа досягається за допомогою регулювання дроселя ДР1 і дроселя зі зворотним клапаном ДР2. Для захоплення штиря впливають на рукоятку крана РК2, при цьому стиснене повітря підводить у штокову або поршневу порожнини пневмоциліндра Ц3.
Масло для змащення золотників і пневмоциліндрів розпорошується з масельнички М.
Для витягу штиря впливають на рукоятку крана РК1, причому середнє, положення рукоятки відповідає неодруженому (прискореному) ходу упору, положення „на себе" відповідає робочому ходу упору, а положення „от себе" відповідає зворотному ходу упору.
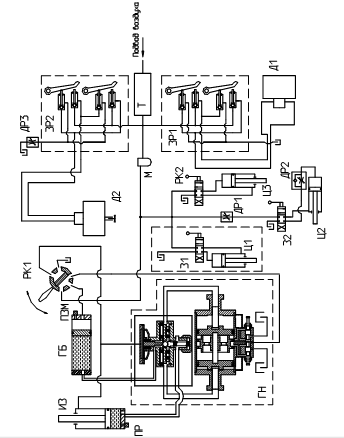
Рисунок 1.2 – “Схема пневмогідросистеми”
1.1.1.2 Пристрій і робота складових частин
Рама шасі машини являє собою збірну конструкцію із прокатних профілів і є підставою для монтажу всіх механізмів машини.
У задній частині рами встановлений керований міст 15 (рис. 1). Він складається з поперечної балки, із установленими в торцях поворотними кулаками з колісьми. Поворотні кулаки за допомогою важільної системи й ланцюгової передачі з'єднані з валом кермового колосся. Поворот колеса щодо поздовжньої осі машини становить 3ПРО.
У передній частині рами встановлений провідний міст 16. Він являє собою диференціал із черв'ячною передачею. Диференціал забезпечує перерозподіл крутного моменту по колесах, що виключає їхнє прослизання при повороті машини. Це значно знижує зношування гумового бандажа. Корпус диференціала провідного мосту з'єднаний з півосями, на яких за допомогою підшипників установлені колеса. Півосі, своїми постелями центрують провідний міст щодо вала маршового пневмодвигуна 17. Для компенсації перекосів і забезпечення демпфірування ударних навантажень, вал пневмодвигуна й вхідний вал провідного мосту з'єднані пружною муфтою.
У центральній частині шасі розміщена стійка 11, на яку за допомогою двох конічних підшипників монтуються поворотний стовпчик 10. У нижній частині стійки жорстко закріплене черв'ячне колесо 13 приводу обертання стовпчика.
Поворотний стовпчик складається зі звареної металоконструкції. Металоконструкція являє собою набір зварених елементів і несе на собі основне статичне й динамічне навантаження, виконана вона „двохярусної", тобто має два полики, у зв'язку із цим, робоче місце анодчика розміщається на верхньому полику, що сприяє підвищенню оглядовості робочого органа й зони обробки электролізера.
У передній частині металоконструкції розміщені місця кріплення циліндра підйому 5 і напрямної 19, а в задній частині встановлений фланець кріплення пневмодвигуна повороту.
Напрямна, за допомогою тяг і циліндра підйому має можливість обертання щодо шарнірів. Це дає можливість змінювати положення робочого органа 3 у вертикальній площині залежно від висоти розташування штиря, що витягає. У напрямної встановлений робочий орган, що складається з каретки й ізвлікачем. Кріплення ізвлікачя до каретки здійснюється за допомогою горизонтального шарніра й групи пружин, установлених вертикально. Пружини компенсують можливий перекіс ізвлекателя, що виникає внаслідок погрішності установки штиря в анод. Крім цього вони сприймають вертикальну складову зусилля, що виникає при витягу. Тим самим значно розвантажують напрямну й металоконструкцію від перевантажень.
Ізвлікач складається з корпуса, автоматичного захоплення, упору й пневмогидроциліндру. Автоматичне захоплення 1 кліщового типу приводиться в дію, через систему важелів від пневмоциліндру 2.
У задній частині поворотного стовпчика, під сидінням, розміщена насосна станція. Вона складається з гідронасоса й гідробака.
У якості пневмодвигуна використається пневмомотор П12-12. Такий же пневмомотор використаний і як маршовий двигун, що розміщений на шасі 18.
Сидіння 12 анодчика перебуває над пневмодвигуном.
Пневмогидропривід машини складається із пневматичної й гідравлічної систем, взаємозалежних між собою. Пневмосистема управляє рухом машини, обертанням поворотного стовпчика, підйомом напрямної, подачею робочого органа, роботою автоматичного захоплення й забезпечує функціонування гідросистеми. Гідросистема є силовий, тому що працює на високих тисках 200-230 кГс/див2. Це тиск і створює зусилля на захопленні ізвлекателя, необхідне для витягу штиря.
Пневмогидропривід містить два пневмомотора, педальний золотник керування рухом машини, педальний золотник обертання поворотного стовпчика, кран керування роботою ізвлекателя, кран керування автоматичним захопленням, гідробак, золотник подачі робочого органа, золотник підйому напрямних, пневмоциліндр автоматичного захоплення, пневмоциліндр підйому напрямних, пневмоциліндр робітника органа, гідронасос, масельничка, теплообмінник,
Гідронасос і пневмоциліндр подачі робочого органа розміщені в нижньому „ярусі" металоконструкції поворотного стовпчика. Педальний золотник пересування машини встановлений з лівої сторони на верхньому полику, а педальний золотник обертання стовпчика перебуває із правої сторони на верхньому полику (по ходу руху машини). У задній частині поворотного стовпчика, під нижнім поликом перебуває теплообмінник.
На правій щоці металоконструкції стовпчика розміщений кран керування ізвлекателя, а на лівій щоці - золотник подачі робочого органа. На пневмоциліндрі підйому робочого органа розташований золотник підйому й кран включення автоматичного захоплення. По осі обертання стовпчика встановлені вал і кермове колеса.
Гідробак призначен для забезпечення прискорення хід упор ізвлекателя (вперед, назад), створен підпір в усмоктувальній магістралі гідронасос і для зберігання масла. Гідробак являє собою циліндр із поршнем, що розділяє внутрішній простір циліндра на дві порожнини: повітряну й масляну.
0 комментариев