Навигация
Многоковшовые погрузчики
32487
знаков
0
таблиц
33
изображения
1.4 Многоковшовые погрузчики
Многоковшовые погрузчики предназначены для зачерпывания насыпного груза ковшовым элеватором, установленным спереди самоходного шасси. Их применяют на базисных складах для перегрузки в основном песка, гравия, щебня, каменного угля и других грузов из штабеля в транспортные средства, а также на ленточные транспортеры на заводах железобетонных изделий. Кроме того, их используют для штабелирования насыпного груза из куч, отсыпаемых автомобилями-самосвалами; разгрузки железнодорожных платформ с насыпным грузом, когда погрузчик передвигается по верху платформы (с установкой специальных переходных мостиков между соседними платформами); в дорожном строительстве, когда погрузчик тянет за собой асфальтобетонный смеситель, загружая его песком и щебнем, подбираемыми ковшами с дороги; для погрузки снега из валов на автомобили-самосвалы.
По условиям более легкого зачерпывания и обеспечения необходимой прочности ковшового элеватора они более приспособлены для перегрузки зернистых и мелкокусковых грузов с включениями отдельных кусков размером не более 70 мм.
В последнее время многоковшовые погрузчики на небольших складах стали вытесняться одноковшовыми как более дешевыми и мобильными, но на базисных складах они с успехом заменяют одноковшовые экскаваторы.
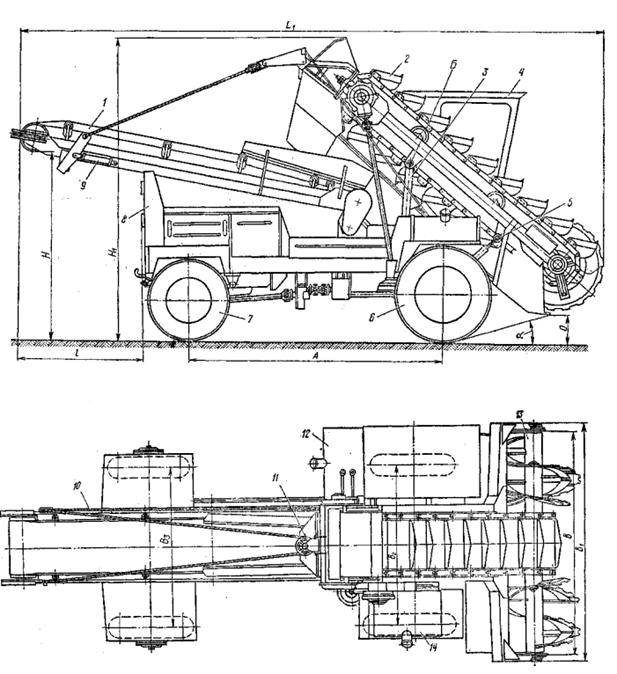
Рисунок 1.12 – Многоковшовый погрузчик:
1 — ленточный транспортер; 2 — ковшовый элеватор; 3 — опорная стойка для элеватора; 4 — кабина; 5 — гидроцилиндры для подъема элеватора, 6, 7 — ведущие мосты; 8 — шасси; 9 — цилиндры для подъема транспортера; 10 — канаты для подвески транспортера; 11 - уравнительный блок; 12 - масляный бак; 13 — винтовые питатели; 14 — топливный бак
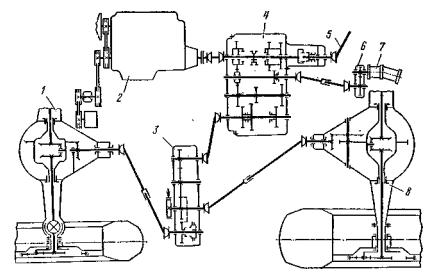
Рисунок 1.13 – Кинематическая схема самоходного шасси многоковшового погрузчика
1.5 Погрузчики с нагребающими лапами
Погрузчики с нагребающими лапами являются самоходными машинами, которые работают способом бокового захвата насыпного груза. В качестве рабочего захватного органа они оборудованы парой нагребающих лап, совершающих сложное вращательное движение около своих вертикальных осей, расположенных на конце клиновидной приемной рамы, называемой лопатой. При движении погрузчика вперед конец лопаты врезается в насыпной груз, лапы нагребают его на лопату и перемещают вверх на скребковый транспортер для загрузки в транспортные средства.
Пожалуй ни в какой другой машине кроме одноковшового экскаватора не повторена так хорошо кинематика движений рук человека, как в погрузчиках с нагребающими лапами.
Поскольку работа погрузчиков с нагребающими лапами связана с большим износом трущихся поверхностей у рабочих органов из-за больших сил трения при перемещении груза способом волочения, то эти погрузчики предпочтительнее применять для перегрузки малоабразивных грузов, например снега.
При очень малой рабочей высоте их применяют также в горном деле для погрузки каменного угля под землей, а также на земле для погрузки угля, кокса, а иногда щебня из штабелей и при подборе их с железнодорожных путей после разгрузки полувагонов прямо на пути.
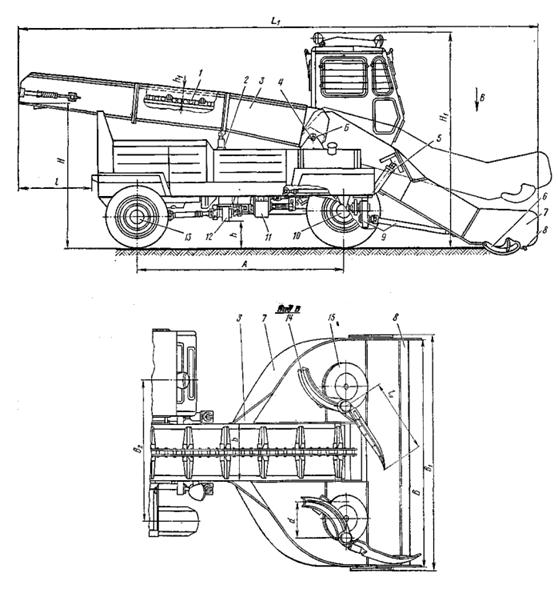
Рисунок 1.14 – Снегопогрузчик Д-566:
1 — скребковый транспортер; 2, 5 — гидроцилиндры; 3 —желоб транспортера; 4- стойки; 5 — полозки; 7 — лопата; 8 — нож лопаты; 9 - трансмиссия привода нагребающих лап и транспортера; 70, 73 — передний и задний ведущие мосты; 11 - коробка передач; 12 - раздаточная коробка; 14 — нагребающие лапы; 15 — диски для привода лап
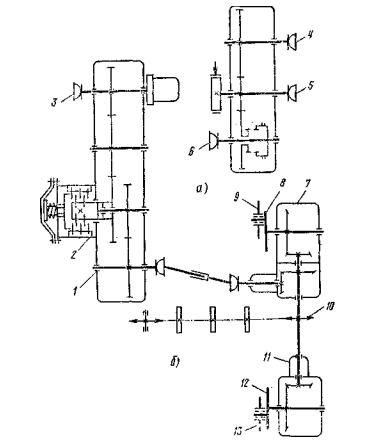
Рисунок 1.15 – Кинематические схемы привода оборудования снегопогрузчика Д-566:
а — раздаточной коробки; 6 — нагребающих лап и скребкового транспортера
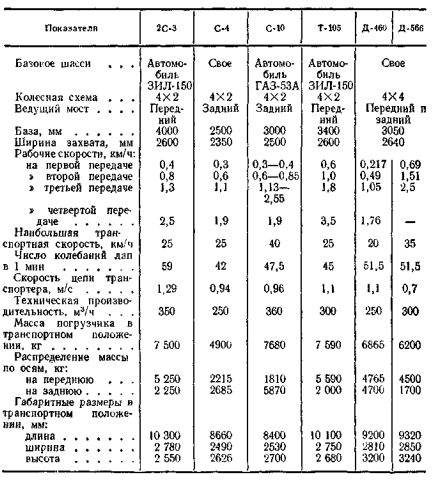
Таблица 1.4 – Техническая характеристика снегопогрузчиков
2 Устойчивость автопогрузчиков
Вилочные погрузчики проверяют на продольную и поперечную устойчивость.
При расчете принимают номинальный груз с формой куба, у которого сторона равна удвоенному расстоянию от центра тяжести груза до спинки грузовых вил. В наклонном положении погрузчик должен удерживаться основным тормозом.
Продольную устойчивость рассчитывают в пяти разных случаях.
Первый случай. Автопогрузчик с поднятым на полную высоту номинальным грузом и отклонением вперед до отказа грузоподъемником стоит на горизонтальной площадке. При расчете следует учитывать дополнительный наклон грузоподъемника вперед из-за просадки переднего моста и упругой деформации элементов конструкции (рисунок 2.16, а). Такой случай встречается при штабелировании груза и считается самым тяжелым для устойчивости. При расчете приняты обозначения:
QH — грузоподъемная сила;
G1, G2 — веса соответственно номинального груза, автопогрузчика без грузоподъемника и вертикально установленного грузоподъемника, кгс
О, О1, O2 — центры тяжести соответственно груза, автопогрузчика без грузоподъемника и вертикально установленного грузоподъемника;
С—ось поворота рамы грузоподъемника;
О', О'2 — центры тяжести груза и грузоподъемника, отклоненных вперед на угол β=β1+β2 ;
β1β2=2 ° — углы наклона соответственно грузоподъемника вперед до отказа и из-за проседания шин вместе с упругой деформацией конструкции;
a1, a2, a`2, l,l`,
h ,h1, h2 — вылеты центров тяжести от оси передних колес и их высоты от земли;
аc, hc — координаты оси поворота грузоподъемника относительно оси передних колес. Вылеты центра тяжести грузоподъемника и груза от оси передних колес при наклоне можно определить по формулам.
a`2= ac + O`2Ccos(γ1 – β);![]()
l` = ac + O`C(γ – β);
где
O`C = OC = ![]()
И углы наклона к горизонту линий OC и O2C
Коэффициент грузовой устойчивости
Второй случай. Автопогрузчик с поднятым на полную высоту номинальным грузом и нормально установленным к основанию автопогрузчика грузоподъемником стоит на наклонной площадке (см. рисунок 2.16, б).
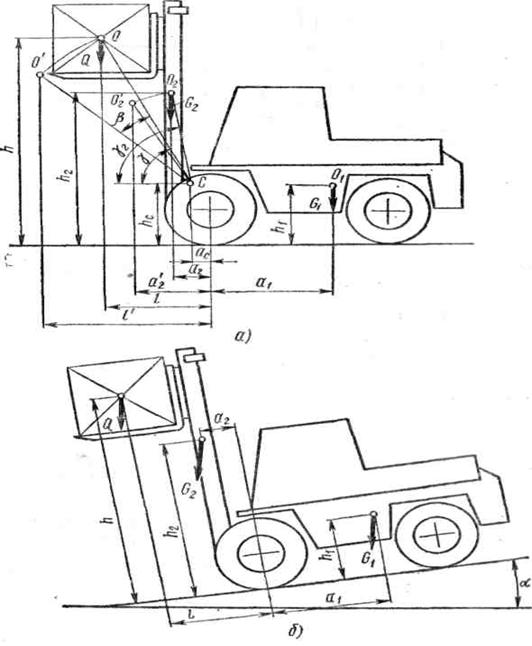
Рисунок 2.16 - Схемы продольной устойчивости вилочных погрузчиков с поднятым грузом: a - при штабелировании; 6 — на уклоне
Уклон площадки принимают равным 4% (α = 2° 16') для автопогрузчиков грузоподъемностью до 5 т и 3,5% (α= 2°) — свыше 5 т.
Соответственно принятым на рисунке обозначениям коэффициент грузовой устойчивости

Коэффициент грузовой устойчивости в этом случае, , может быть меньше, чем в первом случае.
Третий случай. Автопогрузчик с грузом при увеличенной 1Г0 массе на 10%, т. е. при 1,1Q, поднятым от земли на высоту h = 300 мм, и отклоненным назад грузоподъемником до отказа
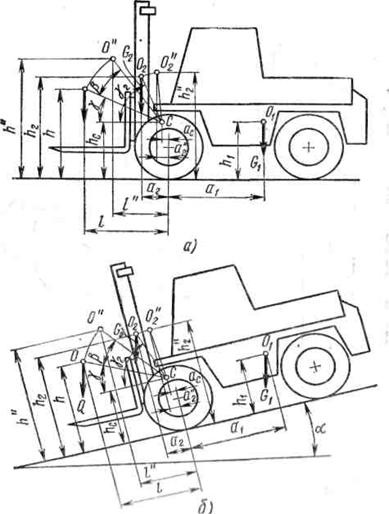
Рисунок 2.17 - Схемы продольной устойчивости вилочных погрузчиков с опущенным грузом:
а — на горизонтальной площадке; б — на наклонной площадке
Движется с максимальной скоростью и затормаживается с замедлением / = 1,5 м/с2 (рис. 2.17, а). При расчете приняты обозначения:
О, O2 — центры тяжести соответственно груза и грузоподъемника, когда груз поднят на 300 мм мри вертикально установленном грузоподъемнике;
Ох — центр тяжести автопогрузчика без грузоподъемника;
О", О"2 — центры тяжести соответственно груза и грузоподъемника, когда груз поднят на 300 мм и грузоподъемник отклонен назад на угол β=β1-β2 ;
β1-β2=2° — углы наклона соответственно грузоподъемника назад и от проседания шин вместе с упругой деформацией конструкции, град;
С — ось поворота рамы грузоподъемника;
a1,a2,a2``,l,l``
h, h``, h1,h2`` — вылеты центров тяжести от оси передних колеc и их высоты от земли.
Значения величин Q, Gl, G2, ac, hcтакие же, как и в первом случае.
Вылеты а2``, l`` и высоты h1`` и h`` определяют по формулам
![]()
![]()
![]()
![]()
Где
Углы наклона к горизонту
Коэффициент устойчивости

Где F, F1, F2– силы инерции соответственно груза, автопогрузчика без грузоподъемника, определяемые по общей формуле
 ;
;
Где
(N=Q или N=G1 и N=G2; l – замедление, м/с2; g – ускорение свободного падения)
Четвертый случай. Автопогрузчик с номинальным грузом, поднятым от земли на h = 300 мм и отклоненным назад грузоподъемником стоит на площадке с уклоном 18%, т. е. наклоненной под углом α = 10° 12' (см. рисунок 2.17, б).
При тех же обозначениях, что и в третьем случае, получим коэффициент устойчивости

Пятый случай. Автопогрузчик без груза с вилами, поднятыми на 300 мм от земли, и отклоненным назад до отказа грузоподъемником съезжает с уклона на максимальной скорости и при резком повороте.
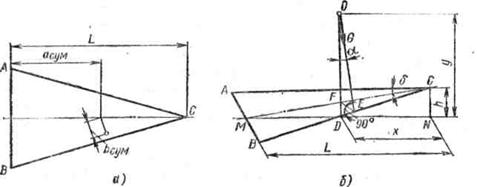
Рисунок 2.18 - Схемы устойчивости вилочных погрузчиков;
а - без груза в транспортном положении о поворотом; 6 - c грузом
Гранью возможного опрокидывания является линия ВС, проходящая через шарнир балансира управляемого моста и опору крайнего колеса ведущего моста (рисунок 2.18, а).
Площадка должна иметь уклон 15+1,09vb%, но не более 50% для автопогрузчиков грузоподъемностью до 5 т и не более 40% при грузоподъемности от 5 до 10 т. Угол наклона площадки
![]()
Где vn – максимальная скорость автопогрузчика без груза км/ч.
Возможное перемещение в плане центров тяжести автопогрузчика без грузоподъемника и одного грузоподъемника из-за наклона площадки на угол α
Где h1, h2`` - соответственно высота от земли центра тяжести автопогрузчика без грузоподъемника и с отклоненным назад грузоподъемником (см. рисунок 2.17).
При весе G1 автопогрузчика без грузоподъемника и G2 с грузоподъемником (см. третий случай устойчивости) получим суммарно высоту центра тяжести автопогрузчика с грузоподъемником, отклоненным назад,
И соответственно расстояние от оси передних колес до центра тяжести автопогрузчика
где а1 и а2 — ординаты центров тяжести от оси передних колес для автопогрузчика без грузоподъемника и одного грузоподъемника (см. рисунок 2.17, б).
Смещение центра тяжести всего автопогрузчика в плане от его продольной оси при наклоне опорной площадки на угол α (см. рисунок 2.18, a) bсум = hсум tg α. Оно не должно выходить за линию ВС опрокидывания.
Поперечную устойчивость автопогрузчика рассчитывают при штабелировании. Автопогрузчик с поднятым номинальным грузом на полную высоту и отклоненным назад грузоподъемником на угол β=β1-β2стоит на поперечном уклоне с углом α. Гранью, возможного опрокидывания является линия ВС, проходящая через шарнир балансира управляемого моста и опору крайнего колеса ведущего моста (см. рисунок 2.18, б). Здесь h — высота шарнира управляемого моста от земли; X, Y — координаты центра тяжести автопогрузчика; G — вес погрузчика с номинальным грузом без управляемого (балансирного) моста. Значения L и АВ такие же, как на рисунок 2.17, а; углы β1 и β2 такие же, как в третьем случае продольной устойчивости.
Опрокидывание автопогрузчика начнется, когда вектор веса G будет пересекать грань опрокидывания ВС. Согласно требованиям СЭВ автопогрузчик должен сохранять устойчивость при поперечном уклоне, равном 6%, т. е. при угле α= 3° 26`. Согласно обозначениям на рисунок 2.18, б
Где EF – плечо опрокидывания; OF – высота от центра тяжести до основания погрузчика; ![]()
Из подобия треугольников CMN и FMD получим
При CN=h получим
Значение EF определяют по формуле
![]()
Где ![]() а
а ![]()
Угол ![]() определится из уравнения
определится из уравнения
3. Расчет параметров и механизма опорного колеса
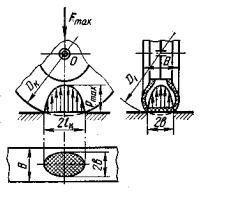
Рисунок 3.19 – Схема к расчёту пневматического колеса
Нагруженное усилием Fmax колесо (рисунок 3.19) деформируется в двух направлениях, образуя пятно контакта в виде эллипса с полуосями lkи b в зависимости от давления и состояния покрытия пути.
При твердом покрытии и шинах высокого давления, когда соотношение модулей упругости покрытия и шины следующее: En>>Em, деформируются только шины. Возникающее давление на поверхности пятна контакта распределяется по закону эллипсоида:
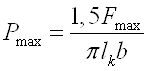
Приняв с допущением D1 = Dk из теории контактных напряжений имеем
![]()
Решая совместно эти уравнения, получим

Где ![]() МПа в зависимости от качества резины.
МПа в зависимости от качества резины.
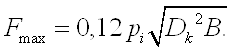
По этой формуле можно рассчитывать Dk и Fmax.
В погрузчиках допускается перегрузка колес до 70% и выше. Перегрузка колес транспортных машин на 20...80% против нормы приводит к снижению пробега соответственно на 30...70%.
При мягком покрытии дороги и работе в поле применяют шины низкого давления. В области контакта одновременно деформируются колеса, поверхность покрытия, пашни. Площадь пятна контакта
![]()
Где ![]() - коэффициент усадки шины; чем больше усадка шины, тем лучше амортизируют колеса, меньше деформация грунта и давление на него.
- коэффициент усадки шины; чем больше усадка шины, тем лучше амортизируют колеса, меньше деформация грунта и давление на него.
Динамическая нагрузка на колесо при шинах низкого давления на 15% больше статической и в 2,5 раза меньше, чем при шинах высокого давления.
Нагрузка на колесо с шинами низкого давления
![]()
Где ![]() -жесткость шины в зависимости от конструкции и давления pi в шине.
-жесткость шины в зависимости от конструкции и давления pi в шине.
При использовании в погрузчиках автомобильных шин (6...14 слоев корда) допускаемую нагрузку на колесо определяют по формуле
Деформацию шины находят по формуле

Где ![]()
Список использованных источников
1.Дранников, А.Б. Автопогрузчики. / А.Б. Дранников – М. Машгиз, 1962. – 506с.
2.Базанов, А.Ф. Самоходные погрузчики / А.Ф. Базанов, Г.В. Забегалов. М.: Машиностроение, 1979. – 403с.
3. Ерохин, М.Н. Проектирование и расчет подъемно-транспортирующих машин сельскохозяйственоого назначения / М.Н. Ерохин [и др.], - Москва : Колос, 1999. – 228 с.
4. Кузьмин, А.В. Справочник по расчетам механизмов подъемно-транспортных машин / А.В. Кузьмин, Ф.Л. Мароно. – Изд. 3-е прераб. И доп. – Минск : Высшая школа, 1983. – 350 с.
5. Красников, В.В. Подъемно-транспортные машины / В.В.Красников. – Изд 3-е, перераб. И доп. = Колос, 1981. – 263 с.
6. Правила устройства и безопасной эксплуатации грузоподъемных кранов / Минск : УП «ДИЭКОС», 2001. – 218 с.
Похожие работы
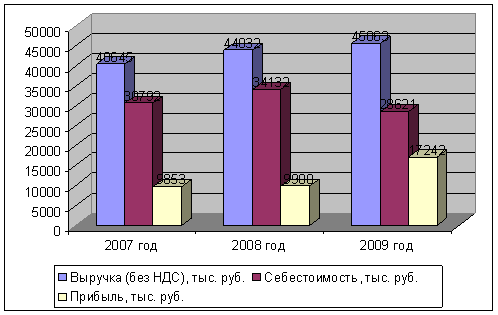
... 2009 годах Таким образом, данные, представленные в таблице 1.1, свидетельствуют о том, что в динамике за исследуемый период все показатели деятельности предприятия улучшились. 2. Расчет затрат на обслуживание и ремонт оборудования 2.1 Планирование численности работников для проведения плавного объёма работ В таблице 2.1 представлена динамика затрат на рабочую силу в 2007 – 2009 годах. ...
0 комментариев