Навигация
Расчет сил, действующих на звенья механизма
22206
знаков
10
таблиц
0
изображений
2.3 Расчет сил, действующих на звенья механизма
Определим силы тяжести звеньев, главные векторы и главные моменты сил инерции звеньев.
Звено 1: ![]()
![]() - т.к. кривошип уравновешен.
- т.к. кривошип уравновешен.
![]()
Звено 2: ![]()
![]()
![]()
Звено 3: ![]()
![]()
![]()
Ф2= ![]() ; Ф3=
; Ф3= ![]()
2.4 Определение значений динамических реакций в кинематических парах групп Ассура
Fc[10] = 33221,2 H
Отсоединим группу Асура (2; 3). Приложим все известные внешние силы, главный вектор сил инерции Fи2 и главный момент сил инерции Ми2, а вместо отброшенных звеньев 1 и стойки 0 приложим реакции F21 и F30, причем неизвестного по величине F21 представим как сумму: ![]() , а реакцию F30 направим перпендикулярно направляющей ползуна.
, а реакцию F30 направим перпендикулярно направляющей ползуна.
Определим реакцию ![]() из условия
из условия ![]() для звена 2
для звена 2



Для определения составляющей ![]() и реакции F30 запишем на основании принципа Даламбера векторное уравнение статики для групп Ассура (2; 3)
и реакции F30 запишем на основании принципа Даламбера векторное уравнение статики для групп Ассура (2; 3)
![]()
Выбираем масштабный коэффициент ![]() Н/мм
Н/мм
Определим чертежные отрезки, изображающие силы на чертеже:





Строим план сил группы Асура (2; 3)
Из плана определяем:
![]()
![]()
![]()
Переходим к силовому расчету механизма 1 класса. В точку В приложим реакцию ![]() . К звену 1 прикладываем главный момент сил инерции
. К звену 1 прикладываем главный момент сил инерции ![]() и движущий момент. Рассмотрим равновесие звена 1 относительно точки А.
и движущий момент. Рассмотрим равновесие звена 1 относительно точки А.
![]()
Из плана сил определяем: ![]() .
.
2.5 Оценка точности расчетов
Находим относительную погрешность:
![]()
![]()
594,6 + 1258,8 – 33600·58,05·0,00095 = 1853,4 – 1852,9 = 0,5 ≈ 0.
3. Синтез зубчатого механизма Исходные данные:
Параметры планетарного редуктора:
U1H = 5,5; k = 4; m1 = 7 мм.Параметры открытой зубчатой передачи:
Z4 = 15; Z5 = 28; m = 12 мм.Параметры исходного контура по ГОСТ 16532–70:
a = 20 град; ha* = 1; c* = 0,25. 3.1 Подбор чисел зубьевПодбор чисел зубьев и числа сателлитов производим с учетом условия соосности:![]() воспользуемся формулой Виллиса с учетом
воспользуемся формулой Виллиса с учетом![]()
 ;
; 
 ;
; 

Подбор зубьев производим путем подбора с учетом ряда ограничений:
Для колес с внешними зубьями: Z1 ≥ Zmin= 17
Для колес с внутренними зубьями: Z3 ≥ Zmin = 85 при ha* = 1
Принимаем Z1 = 24, Z3 = (U1H – 1)*Z1 = 4.5 * 24 = 108
Число зубьев Z2 определяем из условия соседства:
Z1 + Z2 = Z3 – Z2
 - условие целостности выполняется.
- условие целостности выполняется.
Сборка нескольких сателлитов должна выполняться без натягов при равных окружных шагах между ними. Оно выражается следующим соотношением:
![]() , где Ц = 1, 2, 3, … – целое число; p = 0
, где Ц = 1, 2, 3, … – целое число; p = 0
 - условие целостности выполняется
- условие целостности выполняется
 ;
; 
![]() - выполняется.
- выполняется.
Окончательно принимаем Z1 = 24; Z2 = 42; Z3 = 108.
Определяем диаметры колес планетарного редуктора. Редуктор собирается из колес без смещения.
![]()
![]() мм
мм
![]() мм
мм
![]() мм
мм
Вычерчиваем схему редуктора в масштабе 1: 3
3.2 Проектирование цилиндрической эвольвенты зубчатой передачи внешнего зацепленияИсходные данные:
Z1 =13, Z2 =28 – числа зубьев колёс;
m = 8 мм – модуль зацепления;
h*a = 1 – коэффициент высоты головки зуба;
с* = 0,25 – коэффициент радиального зазора.
3.2.1 Выбор коэффициентов смещения x1 и x2 исходного контураКоэффициенты смещения ![]() и
и ![]() должны соответствовать условию: (При отсутствии подрезания зубьев.)
должны соответствовать условию: (При отсутствии подрезания зубьев.)
x1 ³ xmin1; x2 ³ xmin2
xmin1 и xmin2 определяем по формуле:
 ;
;
Наименьший коэффициент смещения по критерию отсутствия подрезания зуба при заданных числах зубьев:
![]() ;
;
![]() ;
;
Выбираем коэффициенты смещения ![]() и
и ![]() из таблицы коэффициента смещения для силовых передач при свободном выборе межосевого расстояния (Z1 = 10…30, Z2 ≤ 30): x1=0.3; x2=0; xå= x1+ x2=0,3.
из таблицы коэффициента смещения для силовых передач при свободном выборе межосевого расстояния (Z1 = 10…30, Z2 ≤ 30): x1=0.3; x2=0; xå= x1+ x2=0,3.
3.2.2 Угол зацепления
![]() ;
;
aw=22.06160=2204’
3.2.3 Делительные диаметры d1 иd2 d1 = m*z1 = 8*13 = 104 мм d2 = m*z2 = 18*28 = 224 мм 3.2.8 Радиусы основных окружностей
 ;
;
 .
.


![]()
![]()
3.2.8 Радиусы начальных окружностей
![]()
![]()
Проверка вычислений:
aw = rw1 + rw2 = 52.72 + 113.56 = 166.28 (мм)
Радиусы вершин зубьев
![]()
![]()
![]()
![]()
Высота зубьев колес
![]()
h = ra1 – rf1 = ra2 – rf2 = 56,68 – 44,4 = 114,28 – 102 = 12,28 (мм)
Основной делительный шаг зубьев![]() мм
мм
Относительные толщины зубьев на вершинах в пределах нормы.
Вычерчиваем по полученным данным эвольвенту зубчатого зацепления в масштабе М 2,5: 1.
4. Синтез кулачкового механизма 4.1 Основные положения и определения
Кулачковым механизмом называется трехзвенный механизм, составленный из стойки и двух подвижных звеньев (кулачка и толкателя), связанных между собой посредством высшей кинематической пары. Механизм служит для воспроизведения заданного периодического закона движения ведомого звена. Ведущим звеном в кулачковом механизме является, как правило, кулачок, ведомым звеном толкатель.
Толкатель в кулачковом механизме заканчивается, как правило, вращающимся роликом, который касается кулачка непосредственно. Наличие ролика никак не отражается на законе движения толкателя. Назначение ролика – перевод трения скольжения толкателя по кулачку, в трение качения ролика по поверхности кулачка. В итоге получаем повышение долговечности кулачкового механизма по износу.
Кулачку в кулачковом механизме присущи два профиля – действительный (рабочий) и теоретический.
Действительным профилем является профиль кулачка, с которым непосредственно соприкасается ролик толкателя.
Теоретический профиль – это кривая, которую описывает центр ролика толкателя при движении относительно кулачка.
Действительный и теоретический профили кулачка являются эквидистантными (равноудаленными друг от друга) кривыми.
В движении кулачкового механизма различают в общем случае четыре этапа (фазы):
1 этап – удаление толкателя, фазовый угол ![]() , 2 этап – дальнее стояние толкателя, фазовый угол
, 2 этап – дальнее стояние толкателя, фазовый угол ![]() . Профиль кулачка на этапе дальнего стояния есть окружность радиуса
. Профиль кулачка на этапе дальнего стояния есть окружность радиуса ![]() с центром на оси О вращения кулачка.
с центром на оси О вращения кулачка.
3 этап – приближение толкателя, фазовый угол ![]() . 4 этап – ближнее стояние толкателя, фазовый угол
. 4 этап – ближнее стояние толкателя, фазовый угол ![]() .
.
Профиль кулачка на этапе ближнего стояния толкателя, является дугой окружности радиуса ![]() , с центром на оси О вращения кулачка. При этом
, с центром на оси О вращения кулачка. При этом ![]() .
.
Соответствие между фазовыми углами в движении кулачка и перемещением толкателя устанавливается, так называемой, циклограммой работы кулачкового механизма.
4.2 Исходные данные![]() ход толкателя, мм;
ход толкателя, мм;
![]() фазовые углы кулачка, соответствующие этапам удаления и приближения толкателя, градусы;
фазовые углы кулачка, соответствующие этапам удаления и приближения толкателя, градусы;
![]() фазовые углы кулачка, соответствующие дальнему и ближнему стоянию толкателя, градусы;
фазовые углы кулачка, соответствующие дальнему и ближнему стоянию толкателя, градусы;
Законы движения:
– при удалении: трапецеидальный
– при приближении: параболический симметричный
4.3 Расчет передаточных функций выходного звена Рассчитаем перемещения Si и аналог ускорения Si¢ по соответствующим заданному закону формулам. Фаза удаления:![]() , при
, при ![]()
 , при
, при ![]()
 , при
, при ![]()
 , при
, при ![]()
 , при
, при ![]()
 , при
, при ![]()
![]() , при
, при ![]()
 , при
, при ![]()
![]() , при
, при ![]()
![]() , при
, при ![]()
![]() , при
, при ![]()
![]() , при
, при ![]()
 , при
, при ![]()
![]() , при
, при ![]()
![]() , при
, при ![]()
h = 20 (мм); φy= 120º = 2.093 рад; ji=0, 0.348, 0.697, 1.046, 1.395, 1.744, 2.093 рад
Фаза возвращения: , при
, при ![]()
![]() , при
, при ![]()
![]() , при
, при ![]()
![]() , при
, при ![]()
![]() , при
, при ![]()
![]() , при
, при ![]()
φb = 50º = 0,872 рад, ji=0, 0.145, 0.29, 0.436, 0.581, 0.726, 0.872 рад
Табл. 4.1
| i |
| ji | Si, м | S`, м | S``, м | yi, мм | y`, мм | y``, мм |
| Фаза удаления | ||||||||
| 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 1 | 20 | 20 | 0,00065 | 0,00563 | 0,03238 | 1,3 | 11,26 | 64,76 |
| 2 | 40 | 40 | 0,00395 | 0,01377 | 0,02435 | 7,9 | 27,54 | 48,7 |
| 3 | 60 | 60 | 0,01001 | 0,01908 | 0,00006 | 20,02 | 38,16 | 0,12 |
| 4 | 80 | 80 | 0,01601 | 0,01381 | -0,0243 | 32,02 | 27,62 | -48,6 |
| 5 | 100 | 100 | 0,01935 | 0,00531 | -0,0243 | 38,7 | 10,62 | -48,6 |
| 6 | 120 | 120 | 0,02 | 0 | 0 | 40 | 0 | 0 |
| Фаза приближения | ||||||||
| 7 | 0 | 220 | 0 | 0 | 0,0526 | 0 | 0 | 105,2 |
| 8 | 8.33 | 228.33 | 0,0011 | 0,0133 | 0,0526 | 2,2 | 7,3 | 105,2 |
| 9 | 16.66 | 236.66 | 0,00424 | 0,0266 | 0,0526 | 8,48 | 14,6 | 105,2 |
| 10 | 24.99 | 244.99 | 0,01 | 0,04 | 0,0526 | 20 | 21,9 | 105,2 |
| 11 | 33.32 | 253.32 | 0,01554 | 0,01755 | -0,0526 | 31,08 | 19 | -105,2 |
| 12 | 41.65 | 261.65 | 0,01887 | 0,0088 | -0,0526 | 37,74 | 9,5 | -105,2 |
| 13 | 50 | 270 | 0,02 | 0 | -0,0526 | 40 | 0 | -105,2 |
μl= 0,0005 м/мм.
4.4 Определение основных размеров
Определим минимальный радиус кулачка из условия выпуклости профиля. Для этого на основании графиков S(φ) и S» (φ), строим график S(S’’). Проведем касательную под углом 45 к оси S. За центр вращения кулачка выбираем точку Оi лежащая ниже точки О на 10 мм.
Ro= 0,0752 м
Проводим окружность радиусом Ro. Так как e = 0, линия движения толкателя yy проходит через центр вращения кулачка Оi. Вдоль этой линии от точки АО откладывается перемещение толкателя согласно графику.
Заключение
В результате выполнения курсовой работы закрепил и обобщил знания и навыки, полученные при изучении дисциплины, научился применять на практике теорию курса (кинематику, динамику, синтез эвольвентного зацепления и синтез кулачкового механизма).
Выполняя курсовой проект по теории машин и механизмов, овладел навыками использования общих методов проектирования и исследования механизмов. Также овладел методами определения кинематических параметров механизмов, оценки сил, что действуют на отдельные звенья механизма, научился оценивать сконструированный механизм с точки зрения его назначения – обеспечивать необходимые параметры движения.
Список использованных источников
1. Попов С.А. Курсовое проектирование по теории механизмов и механике машин. – М.: Высшая школа, 1986.
2. Попов С.А., Тимофеев Г.А. Курсовое проектирование по теории механизмов и механике машин. – М.: Высшая школа, 1999.
3. Курсовое проектирование по теории механизмов и машин. / Под ред. Девойно Г.Н. – Мин.: Высшая школа, 1986.
4. Теория механизмов и машин. / Под ред. Фролова К.В.
Похожие работы
... на отдых и личные надобности % от оперативного времени, Тот.л.-6%. Расчет технически обоснованной операции – сварочной нецелесообразно производить, так как в пункте 3.7 были описаны режимы сварки, инструмент и применяемое оборудование. Технологическая документация Технологический процесс на восстановление деталей согласно стандарта Единой Системы Технологической Документации оформляется ...
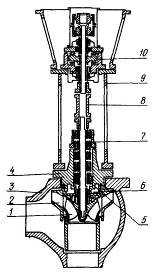
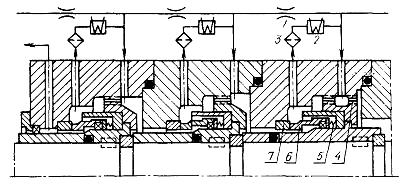
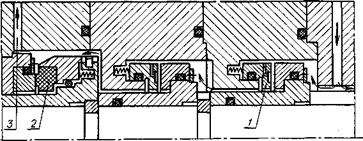
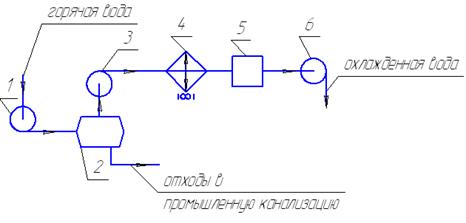
... ірної або охолоджуючої води. Необхідний ресурс - не менше 10 тис. год. Рисунок 15 - Схема установки для випробувань натурних вузлів ущільнень: 1 - фільтр; 2 - бак; 3 - насос; 4 - гідроакумулятор; 5 - компресор; 6 - витратомірний пристрій; 7-теплообмінник; 8 - гідроциклон; 9 - прилад; 10, 11 та 12 - ступені основного ущільнення; 13 - плаваюче ущільнення; 14 - допоміжна ступень ущільнення; ...
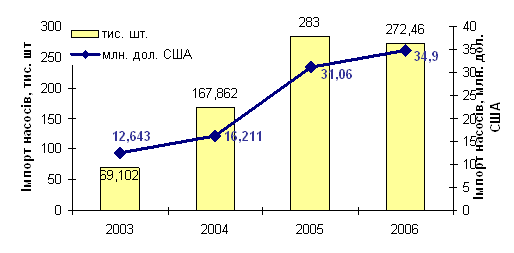
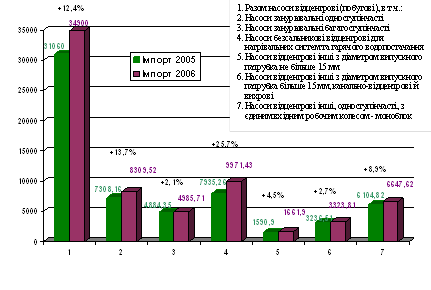
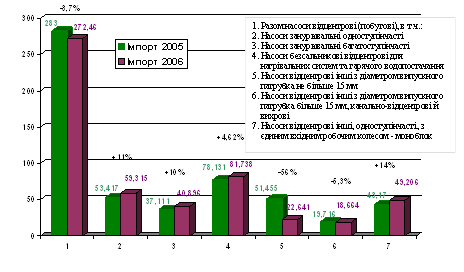
... ів, тоді як у 2001 - 42%. Тобто з кожним роком вітчизняні виробники побутових насосів продовжують здавати свої позиції. Торгові марки на ринку побутових насосів. Властиво, по-справжньому відомих марок побутових насосів, тобто тих, що "на слуху" у всіх торговців, на українському ринку не так і багато. Насамперед пригадуються німецькі "гранди" Wіlo і Grundfos. Ці дві марки поділили між собою ринок ...
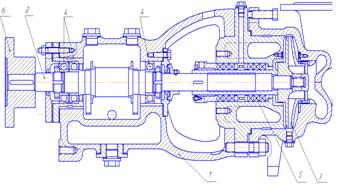
... заусенцев и т.д. Рабочие колеса не должны иметь износа лопаток и дисков от коррозии и эрозии более 25% от них номинальной толщины. Изгиб лопаток не допускается. 4.6 Ведомость дефектов на ремонт центробежного насоса марки НГК 4х1 Таблица 4.6.1 - Ведомость дефектов Наименование узлов и дета лей подлежа щих ре монту Характер неис прав ности Метод уст ранения Необходимые мате риалы ...
0 комментариев