Навигация
Конструкции и технологии датчиков
20717
знаков
4
таблицы
8
изображений
3. Конструкции и технологии датчиков
Первыми датчиками для универсальных УЗ сканеров были секторные механические датчики качающегося типа (термин «качающийся» относится к пьезоэлектрическому преобразователю). Сейчас они постепенно вытесняются электронно-управляемыми датчиками (линейными и конвексными), но по-прежнему применяются и совершенствуются.
Обобщенная структурная схема такого датчика приведена на рис.4.
 | ||||||
 | ||||||
 |  | |||||
Рисунок 4. Структурная схема механического датчика.
Электродвигатель может совершать возвратно-вращательное движение и одностороннее вращение. В зависимости от этого датчик углового положения может иметь различный принцип действия и конструкцию. Преобразователь движения может включать редуктор и преобразователь вида движения (перевод вращения из одной плоскости в другую, перевод вращательного движения в качательное).
 |
Рассмотрим вначале устройство отдельных узлов датчика, в котором двигатель совершает возвратно-вращательное движение. Для этого применяют так называемые моментные двигатели постоянного тока. Они питаются от управляющего устройства, вырабатывающего напряжение специальной формы. Упрощенная конструкция и некоторые детали такого двигателя изображены на рис.5
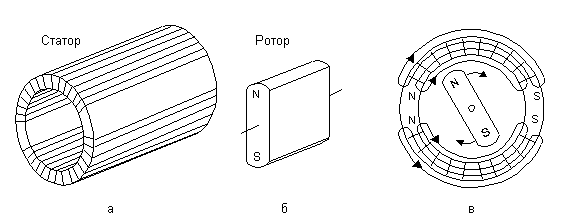
Рисунок 5 Моментный двигатель постоянного тока.
Основными частями электродвигателя являются статор и ротор (рис. 5, а, б) Статор собирается из тонких пермаллоевых колец. Обмотка статора состоит из двух секций, которые включаются встречно. Ротор представляет собой постоянный магнит из феррита. При пропускании тока через обмотки статора они создают в сердечнике магнитные потоки, направленные в разные стороны, поэтому основной поток в сердечнике равен нулю. Но ввиду того, что ширина колец мала по сравнению с их диаметром, образуются потоки рассеяния, сцепленные с обмотками. Получаются как бы два магнита с одинаково расположенными одноименными полюсами. Взаимодействуя с полями этих магнитов, ротор поворачивается, стремясь занять положение, параллельное обмоткам. Динамические характеристики механической системы и параметры тока возбуждения (величина, форма, период) согласованы так, что когда ротор повернется на угол 90 – 100о от исходного крайнего положения, происходит коммутация тока в обмотках и начинается его движение в обратную сторону.
Чтобы движение было равномерным, необходимо постоянство вращающего момента, а для этого в свою очередь требуется постоянство тока в обмотках. В момент коммутации и смены направления вращения возникают броски тока за счет инерционности системы управления (рис 6). В некоторых случаях ток может линейно нарастать (штриховая линия на рисунке). Требуемую форму тока обеспечивает специальная система регулирования с обратной связью через датчик угла поворота. Она учитывает механические и электрические характеристики системы. В режиме М должен быть задан определенный угол поворота пьезопреобразователя. Для этого система регулирования с высокой частотой реверсирует ток в обмотках статора, удерживая тем самым ротор в одном положении.
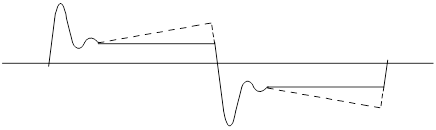 |
Рисунок 6. Форма тока моментного двигателя.
Броски тока двигателя весьма нежелательны, особенно при пуске датчика. Пусковые токи могут достигать величин, опасных (несколько ампер) для выходного усилителя системы управления, питающего двигатель. При сбое системы управления могут одновременно включиться все механические датчики используемого комплекта (как правило, все они подключены и выбираются с помощью сенсоров). Это может привести к выходу усилителя из строя. На этот случай предусмотрена защита, например, в виде плавкого предохранителя.
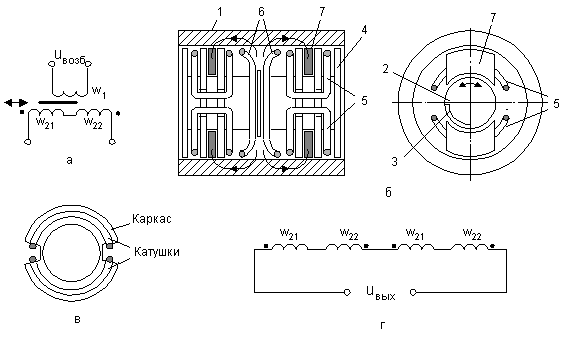 |
На общем валу с электродвигателем находится ротор датчика угла поворота (ДУП). Конструкцию и принцип действия ДУП поясняет рис.7. По сути, он представляет собой дифференциальный трансформаторный датчик перемещения (рис.7,а). Он имеет обмотку возбуждения w1 и вторичные обмотки w21 и w22,
Рисунок 7. Датчик углового положения трансформаторного типа.
которые включены встречно. Подвижный сердечник перемещается относительно этих обмоток, при этом ЭДС в них изменяются. В среднем положении сердечника они одинаковы, и выходной сигнал равен нулю. При смещении сердечника влево или вправо ода из ЭДС увеличивается, а другая уменьшается. Выходной сигнал растет по величине и может иметь различную фазу в зависимости от положения сердечника (левое или правое). Так как габариты датчика очень маленькие, первичная обмотка возбуждается высокочастотным током (10 – 15 кГц).
На рис 7, б изображена упрощенная конструкция ДУП. Его основными частями являются статор 1 из мягкой стали, ротор 2 из немагнитной стали (например, 36НХТЮ) с помещенной на нем пластинкой 3 из ферромагнетика, каркас 4 с размещенными на нем парами сигнальных катушек 5 и катушкой возбуждения 6. Сигнальные катушки расположены парами симметрично относительно центра и имеют сложную форму. Для лучшего представления о ней на рис 14, в показан фрагмент каркаса и одна пара катушек. Пары соединяются последовательно, так, чтобы одноименные катушки были включены согласно (рис.7, г). Катушка возбуждения находится между парами сигнальных катушек. При монтаже края ее витков разводят («распушают»). Внутри сигнальных катушек закрепляют ферритовые сердечники 7.
За счет «распушивания» катушки возбуждения значительная часть создаваемого ею магнитного потока ответвляется в статор и попадает в сердечники 7. Перемещение ферромагнитной пластинки 3 вызывает перераспределение магнитных сопротивлений между сердечниками 7 и катушками сигнальных пар, изменение их ЭДС и возникновение сигнала на выходе. Датчик проектируют, а затем регулируют таким образом, чтобы зависимость величины сигнала от угла поворота была линейной.
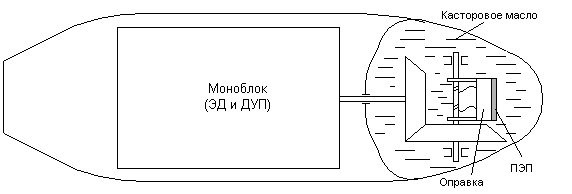 |
Передачу вращательного движения из одной плоскости в другую осуществляют с помощью пары конических шестеренок. Они вместе с ПЭП находятся в герметичной камере, заполненной иммерсионной жидкостью (рис 8), которая служит для передачи УЗ колебаний. В качестве такой жидкости обычно применяют касторовое масло.
Рисунок 8. Передача движения на пьезопреобразователь.
Дисковый пьезопреобразователь находится в оправке, которая закреплена на оси шестеренки. Для подвода импульса возбуждения и съема эхо-сигнала используются гибкие проводники, которые навиваются на ось. Это исключает их болтание во время качания ПЭП и продлевает срок службы. Электродвигатель и датчик углового положения конструктивно объединяются в моноблок, размещаемый в цилиндрическом корпусе из легкого металла.
Сложность системы управления датчиком с колебательным двигателем и переходные процессы, возникающие при его реверсе, побуждают разработчиков вновь обратиться к датчикам с непрерывно вращающимся двигателем. Они применялись и раньше в УЗ сканерах аналогового типа. В качестве ДУП в них использовались синусно-косинусные трансформаторы (СКТ), которые подобно трансформаторному ДУП, рассмотренному выше, имеют три обмотки. Одна из них – обмотка возбуждения, питаемая ВЧ током, а две другие – синусная и косинусная – дают сигналы, пропорциональные синусу и косинусу угла поворота ротора. В качестве датчиков угла СКТ оказались неудобными для современных цифровых УЗ аппаратов.
В датчиках с непрерывным вращением используются стандартные двигатели постоянного тока. Так как обычно они высокоскоростные, приходится понижать частоту вращения с помощью редукторов примерно с 3000 об/мин до 300 об/мин. Кроме того, нужен специальный механизм для преобразования вращательного движения в колебательное. В таком датчике перспективно применение ДУП с оптоэлектронными преобразователями. Принцип этих датчиков хорошо известен. Они применяются, например, в «мыши» компьютера для управления положением курсора. Один из возможных вариантов кинематической схемы датчика с односторонне вращающимся двигателем и ДУП оптронного типа приведен на рис.9.
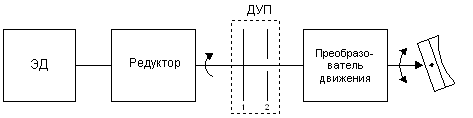 |
Рисунок 9. Датчик с односторонне вращающимся двигателем.
Частота вращения электродвигателя понижается редуктором. Вращение его выходного вала преобразователем движения переводится в качательное движение ПЭП. Оптоэлектронный датчик углового положения состоит из двух дисков 1 и 2, причем диск 1 сидит на общем валу редуктора и преобразователя движения и, следовательно, вращается, а диск 2 неподвижен. Вал проходит через отверстие в его середине.
Более подробно устройство оптоэлектронного ДУП поясняет рис.10. Измерение углов производится с помощью ИК оптотоэлектронных пар ОП1, ОП2 и ОП3. Излучение источников проходит через щели и отверстия, расположенные на дисках. На диске 1 по периметру размещены щели (их может быть 128 – 256) и имеется одно отверстие. На диске 2 имеется две группы щелей по 8 –12 в каждой, разнесенные на угол около 90о. Для ИК излучения отверстие и щели диска 2 играют роль коллиматоров. Шаг щелей одной группы такой же, как и на диске 1, а шаг другой группы несколько иной. Одна из групп щелей (с меньшим шагом) выполняет роль нониуса и служит для более точного измерения углов. Метод нониуса широко используется в
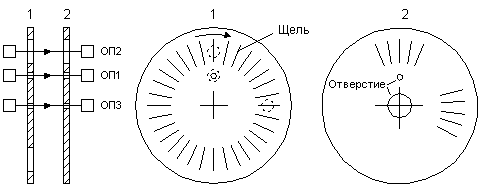 |
Рисунок 10. Оптоэлектронный датчик углового положения.
измерительной технике. Нониусы имеются на штангенциркулях, микрометрах, лимбах металлорежущих станков. Применяется этот метод и в электронных измерительных приборах.
При сборке датчика ПЭП устанавливается в определенное начальное положение. Когда в процессе вращения происходит совпадение отверстий, ИК луч от источника оптопары ОП1 попадает на ее приемник. Возникающий в нем импульс свидетельствует о начале движения в секторе качания. Одновременно с этим импульсом начинают поступать импульсы от оптопар ОП2 и ОП3. Первые из них (по ходу вращения) совпадают во времени, затем они начинают расходиться и в некоторый момент снова происходит совпадение. По числу импульсов между первым и вторым совпадением и уточняют величину измеряемого угла. С помощью нониуса измерения штангенциркулем можно производить с точностью до 0,1 мм и даже 0,05 мм. В данном случае измерение угла можно производить с точностью, по крайней мере, до половины шага.
Управление датчиком с непрерывно вращающимся двигателем намного проще, чем датчиком с качающимся двигателем. Кроме стабилизатора скорости вращения для двигателя практически ничего не требуется. Основная сложность при производстве датчика заключается в изготовлении дисков со щелями и их юстировке (установке нужного взаимного расположения). Определенные трудности возникают и при проектировании преобразователя вида движения – вращения в качание. Он должен быть компактным, долговечным, вносить небольшие дополнительные
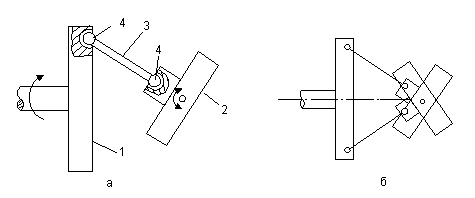 |
Рисунок 11. Преобразователь вида движения.
вибрации. Так как преобразователь в основном располагается в камере с иммерсионной жидкостью, то он должен иметь обтекаемую форму, чтобы испытывать наименьшее сопротивление и не создавать завихрений в жидкости при своем движении. Простейшая конструкция преобразователя движения предлагается на рис.11.
Передача движения от вала редуктора на пьезопреобразователь 1 осуществляется с помощью диска 2 (водило) через шатун 3 и шарниры 4 (рис 11,а). Так как ПЭП закреплен на оси, то он совершает качательное движение. Шатун при этом вращается по конической поверхности и все время проворачивается в шарнирах (рис. 11, б). Эта конструкция, конечно, не отвечает поставленным выше требованиям. На самом деле она значительно сложнее. Основной недостаток датчиков с качающимся ПЭП – неприятные ощущения вибрации, которые испытывает врач. Они накапливаются в течение длительного времени и иногда приводят к развитию синдрома вибраций. Поэтому в некоторых странах такие датчики даже запрещены. Тем не менее, секторные механические датчики в ряде случаев практически незаменимы (внутриполостные применения).
Для точечных исследований применяют метод пункций. Обычно для этого используют линейные или конвексные датчики с насадкой в виде иглы, по которой передаются УЗ колебания.
Похожие работы
... . При этом движению разных органов сердца будут соответствовать звуки различной частоты. Получается своеобразный ультразвуковой фонендоскоп. Правда, серьезные разработчики считают это некими рудиментами, идущими еще от аналоговых доплеровских приборов. Рассмотрим некоторые особенности аппаратных реализаций современных УЗ сканеров. Еще раз отметим, что объем аналоговых средств в них сокращен до ...
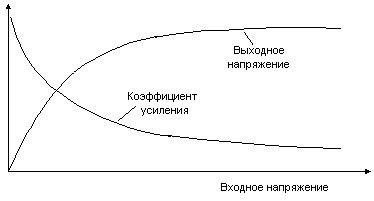
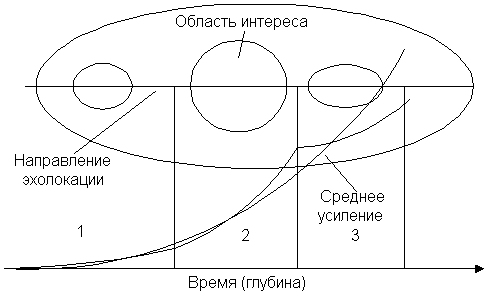
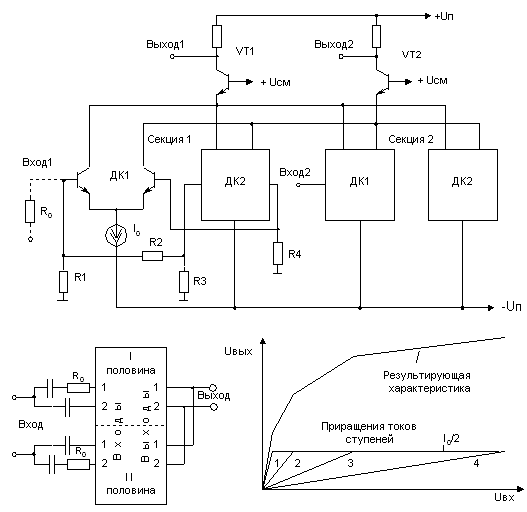
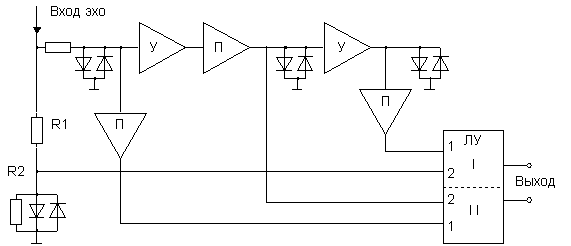
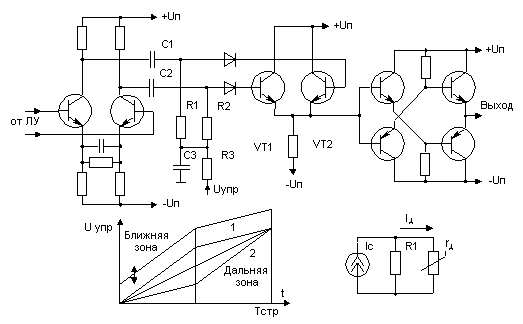
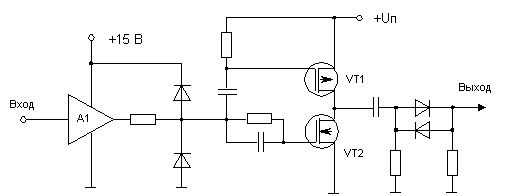
... втором и, наконец, при самом большом входном сигнале (который наиболее вероятно придет из приповерхностной области) – в первом. Таким образом, многокаскадный усилитель дает дополнительное сжатие сигнала на 50 – 60 дБ. Блоки ВАРУ различных поколений УЗ сканеров отличаются количеством ступеней регулирования и способом воздействия на параметры схемы. Один из ранних методов ВАРУ основан на ручной ...





... больше амплитуда зарегистрированного сигнала, а значит, тем светлее и ярче он будет выглядеть на экране аппарата. Полным отражателем является граница между тканями и воздухом. 2. ХАРАКТЕРИСТИКИ СКАНЕРОВ: Вид оригинала. Сканирование может осуществляться в проходящем свете (для оригиналов на прозрачной подложке) или отраженном (для оригиналов на непрозрачной подложке). Сканирование негативов ...
... сердца. Однако такое деление условно. Существуют установки, которые дают возможность одновременно изучать как анатомические, так и функциональные параметры. 3. Объект ультразвукового исследования Благодаря своей безвредности и простоте ультразвуковой метод может широко применяться при обследовании населения во время диспансеризации. Он незаменим при исследовании детей и беременных. В ...
0 комментариев