Навигация
Расчет основных деталей и узлов
25430
знаков
0
таблиц
12
изображений
2. Расчет основных деталей и узлов
Для предварительного определения массы машин служит ГОСТ 19618-74 и типаж на эти машины. Ориентировочные массы отдельных узлов экскаватора определяются по соответствующим показателям машин-аналогов с учетом правил масштабности конструкций, установленных по теории подобия.
Для определения общих размеров машины и ориентировочных размеров ее узлов служат эмпирические формулы.

Dp = 1,75 * 1.8 = 3.15
bk = 0.9 * 0.7 = 0.63
hk = 0.5 * 0.7 = 0.35
Tk = 3.14 * 3.15 / 0.35 = 28.26
lk = 0.4 * 28.26 = 11.3
3. Расчет технико-экономических показателей машины
Производительность:
Эксплуатационная производительность роторных траншейных экскаваторов по выносной способности, м3/ч,
Q = 3600 nmqkнkв/kр,
где n - частота вращения ротора, с-1; m - число ковшей; q - вместимость ковша, м3; kв - коэффициент использования машины по времени (0,7...0,85); kн - коэффициент наполнения (0,9... 1,1); kр - коэффициент разрыхления грунта (1,1…1,4).
Мощность:
Мощность, расходуемая на копание грунта, кВт,
Р = RК*Q/3600,
где Rк - удельное сопротивление копанию (кПа), зависящее от категории разрабатываемого грунта; для грунтов I категории Rк ~ 100 кПА, II категории Rк ~ 200 кПА, III - Rк ~ 300 кПА, IV - Rк ~ 400 кПа.
Глубина отрываемой траншеи :
![]()
Rp – радиус ротора до режущих кромок;
Ho.p – разница уровней платформы экскаватора и оси вращения ротора;
4. Тестовый расчет
Производительность:
Q = (3600*n*m*qz*kv*kn)/kp = (3600*0.13*14*0.16*0.7*0.9)/1.1 = 600 m3/ч
Мощность необходимая для рытья траншеи:
P = (Rk*Q)/3600 = (100*600)/3600 = 16.6 кВm
5. Методы, применяемые для определения оптимального режима работы
5.1 Нахождение max значения производительности с помощью метода Фибоначчи
Предположим, что нужно определить минимум как можно точнее, т. е. с наименьшим возможным интервалом неопределенности, но при этом можно выполнить только n вычислений функции. Как следует выбрать n точек, в которых вычисляется функция? С первого взгляда кажется ясным, что не следует искать решение для всех точек, получаемых в результате эксперимента. Напротив, надо попытаться сделать так, чтобы значения функции, полученные в предыдущих экспериментах, определяли положение последующих точек. Действительно, зная значения функции, мы тем самым имеем информацию о самой функции и положении ее минимума и используем эту информацию в дальнейшем поиске.
Предположим, что имеется интервал неопределенности (x1, x3) и известно значение функции f(х2) внутри этого интервала (см. рис. 5.1). Если можно вычислить функцию всего один раз в точке х*, то где следует поместить точку х4 , для того чтобы получить наименьший возможный интервал неопределенности?
Положим x2-x1 = L и х3 - x2 = R, причем L > R, и эти значения будут фиксированы, если известны x1, x2, x3. Если x4 находится в интервале (x1; x2) , то:
1) если f(х4) < f(x2), то новым интервалом неопределенности будет (x1; x2) длиной x2-x1 = L;
2) если f(х4) > f(х2), то новым интервалом неопределенности будет (x4; x3) длиной х3 - x4.
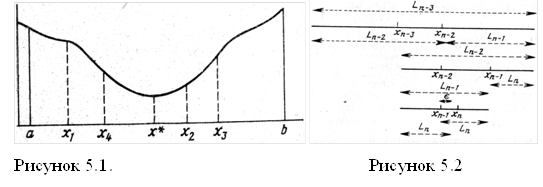
Поскольку не известно, какая из этих ситуаций будет иметь место, выберем x4 таким образом, чтобы минимизировать наибольшую из длин х3 - х4 и х2 - x1. Достигнуть этого можно, сделав длины х3 - x4 и х2 - x1 равными, т. е. поместив х4 внутри интервала симметрично относительно точки х2, уже лежащей внутри интервала. Любое другое положение точки x4 может привести к тому, что полученный интервал будет больше L. Помещая х4 симметрично относительно х2, мы ничем не рискуем в любом случае.
Если окажется, что можно выполнить еще одно вычисление функции, то следует применить описанную процедуру к интервалу (х1, х2), в котором есть значение функции, вычисленное в точке x4, или к интервалу (x4; x3) , в котором уже есть значение функции, вычисленное в точке х2. Следовательно, стратегия ясна с самого начала. Нужно поместить следующую точку внутри интервала неопределенности симметрично относительно уже находящейся там точке. Парадоксально, но, чтобы понять, как следует начинать вычисления, необходимо разобраться в том, как его следует кончать.
На n-м вычислении (рис. 5.2) n-ю точку следует поместить симметрично по отношению к (n-1)-й точке. Положение этой последней точки в принципе зависит от нас. Для того чтобы получить наибольшее уменьшение интервала на данном этапе, следует разделить пополам предыдущий интервал. Тогда точка хn, будет совпадать с точкой хп-1. Однако при этом мы не получаем никакой новой информации. Обычно точки хп-1 и хп отстоят друг от друга на достаточном расстоянии, чтобы определить, в какой половине, левой или правой, находится интервал неопределенности. Они помещаются на расстоянии є/2 по обе стороны от середины отрезка Lп-1; можно самим задать величину є или выбрать эту величину равной минимально возможному расстоянию между двумя точками. (Предположим, что в нашем примере инженер может регулировать температуру с интервалом в 1°С, поэтому є = 1.)
Интервал неопределенности будет иметь длину Ln, следовательно, Lп-1= 2 Ln – є (рис. 11, нижняя часть).
На предыдущем этапе точки хп-1 и хп-2 должны быть помещены симметрично внутри интервала Lп-2 на расстоянии Lп-1 от концов этого интервала. Следовательно,
Lп-2 = Lп-1 + Lп (рис. 5.2, средняя часть).
Из рисунка ясно, что на предпоследнем этапе хп-2 остается в качестве внутренней точки.
Аналогично Lп-3 = Lп-2 + Lп-1 (рис. 5.2, верхняя часть)
В общем случае
Lj-1 = Lj+ Lj+1 при 1 < j < n.
Таким образом,
Lп-1 =2 Lп – ε,
Lп-2 = Lп-1+ Lп =3Lп – ε,
Lп-3 = Lп-2+ Lп-1 =5 Lп – ε,
Lп-4 = Lп-3+ Lп-2 =8 Lп – εи т. д.
Если определить последовательность чисел Фибоначчи следующим образом:
F0= 1, F1 = 1 и Fk=Fk-1 + Fk-2 для k = 2,3, … , то
Ln-j=Fj+1. Ln – Fj-1. ε, j = 1,2, … , n-1
Если начальный интервал (а, b) имеет длину L1 (= b - а), то
L1=Fn. Ln – ε . Fn-2,
т.е. ![]()
Следовательно, произведя n вычислений функции, мы уменьшим начальный интервал неопределенности в 1/Fn раз по сравнению с его начальной длиной (пренебрегая ε) , и это — наилучший результат.
Если поиск начат, то его несложно продолжить, используя описанное выше правило симметрии. Следовательно, необходимо найти положение первой точки, которая помещается на расстоянии L 2 от одного из концов начального интервала, причем не важно, от какого конца, поскольку вторая точка помещается согласно правилу симметрии на расстоянии L2 от второго конца интервала:
![]()
После того как найдено положение первой точки, числа Фибоначчи больше не нужны. Используемое значение е может определяться из практических соображений. Оно должно быть меньше L1/Fn+1, в противном случае мы будем напрасно тратить время на вычисление функции. Таким образом, поиск методом Фибоначчи, названный так ввиду появления при поиске чисел Фибоначчи, является итерационной процедурой. В провесе поиска интервала (х1, х2) с точкой х2, уже лежащей в этом интервале, следующая точка x4 всегда выбирается такой, что х3 - x4 = x2 - x1 или х4 - х1 =х3 - х2, т. е. х4 = x1 - х2 + х3.
Если f(х2) > f(х4) и f(х4) < f(х2), то можно рассмотреть четыре случая, нахождения max функции методом Фибоначчи.
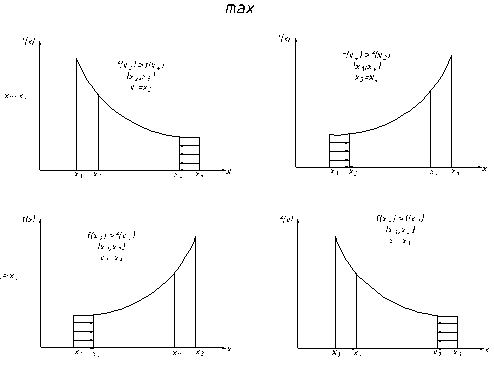
Рисунок 5.3. Четыре варианта расположения точек в интервале поиска max функции методом Фибоначчи
5.2 Определение min значения мощности методом золотого сечения
Не всегда можно заранее определить, сколько раз придется вычислять функцию. В методе Фибоначчи это нужно знать для определения L2, т. е. положения начальной точки.
Метод "золотого сечения" почти столь же эффективен, как и метод Фибоначчи, однако при этом не требуется знать п — количество вычислений функции, определяемое вначале. После того как выполнено j вычислений, исходя из тех же соображений, что и ранее, записываем
Lj-1 = Lj+ Lj+1 .
Однако если п не известно, то мы не можем использовать условие Ln-1 = = 2Ln - ε. Если отношение последующих интервалов будет постоянным, т.е.
![]()
т. е. т = 1 + 1/τ.
Таким образом, τ 2 - τ -1 = 0, откуда ![]() . Тогда
. Тогда
![]() и т. д.
и т. д.
Следовательно,
![]() т.е
т.е ![]()
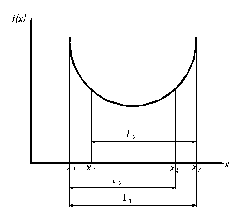
Рисунок 5.4 Поиск экстремума функции методом золотого сечения
В результате анализа двух рассмотренных значений функции будет определен тот интервал, который должен исследоваться в дальнейшем. Этот интервал будет содержать одну из предыдущих точек и следующую точку, помещаемую симметрично ей. Первая точка находится на расстоянии L1/τ от одного конца интервала, вторая — на таком же расстоянии от другого. Поскольку ![]() , то видно, что поиск методом "золотого сечения" является предельной формой поиска методом Фибоначчи. Название "золотое сечение" произошло от названия отношения в уравнении. Видно, что Lj-1 делится на две части так, что отношение целого к большей части равно отношению большей части к меньшей, т. е. равно так называемому "золотому отношению".
, то видно, что поиск методом "золотого сечения" является предельной формой поиска методом Фибоначчи. Название "золотое сечение" произошло от названия отношения в уравнении. Видно, что Lj-1 делится на две части так, что отношение целого к большей части равно отношению большей части к меньшей, т. е. равно так называемому "золотому отношению".
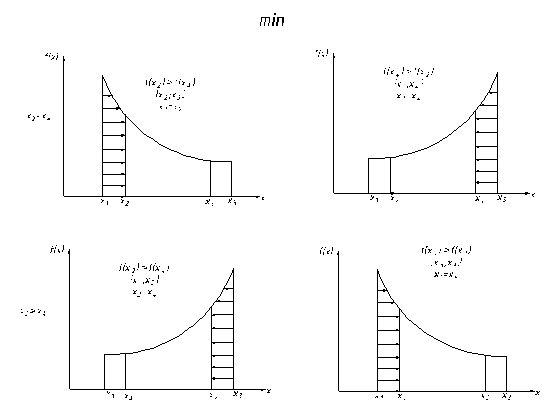
Рисунок 5.5. Четыре варианта расположения точек в интервале поиска min функции методом золотого сечения
6. Выводы и рекомендации
В процессе расчета оптимальных технико-экономических показателей работы многоковшового роторного траншейного экскаватора был проанализирован характер изменения его от частоты вращения вала n. По мнению наблюдателя определились следующие оптимальные значения технико-экономических показателей при n=0.145:
Qопт=780 м3/ч;
Pопт=21.22 кВт.
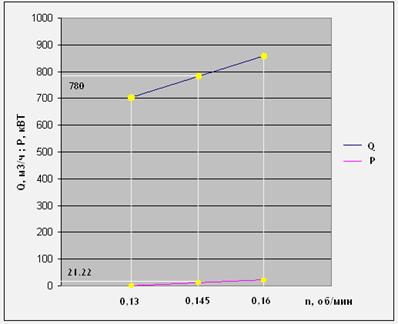
Зависимость графика Q(n) строго линейная, что позволяет увеличивать частоту вращения вплоть до значения, при котором производительность максимальна (указана в технической характеристике). Производительность может быть ограничена только потребляемой машиной мощностью изменяющейся в зависимости от частоты вращения и категории грунта.
График зависимости производительности Q и мощности Р от частоты вращения n.
7. Список литературы
1. конспект лекций
2. http://www.baurum.ru/_library/?cat=power_shovels&id=1209
3. Машины для земляных работ. Под общ. ред. чл.-кор. АН УССР проф. Ю. А. В е т р о в а. — 2-е изд., дораб. и доп. — Киев: Вища школа. Головное изд-во, 1981.— 384 с.
4.http://ru.wikipedia.org/wiki/Роторный_экскаватор
5.http://ru.wikipedia.org/wiki/Метод_золотого_сечения
Похожие работы

... лицевой (желтый) или отборный красный кирпич. Если для ложковых и тычковых рядов использовать кирпичи разного цвета, получится полосатая стена. Впрочем, об узорах мы поговорим позже. А сейчас вернемся к технологии строительных работ. Толщина швов при любой системе перевязки должна быть около 10 мм. Через каждые 2 — 3 ряда проверяют горизонтальность кладки и при необходимости корректируют ...
0 комментариев