Навигация
2. Навигационные приборы
Навигационные приборы - компасы, гироазимуты, автопрокладчики, высотомеры, лаги, лоты, эхолоты, секстаны и другие устройства, предназначенные:
- для измерения отдельных элементов движения судна, летательного аппарата и других подвижных объектов;
- для определения их местоположения; и
- для получения исходных данных для применения оружия.
Компас [сс1]
Ко́мпас (в профессиональной речи моряков: компа́с) — это устройство, облегчающее ориентирование на местности. Существуют три принципиально различных вида компаса: магнитный компас, гирокомпас и электронный компас.
Магнитный компас
История создания. Дорожный компас XVIII век.
Предположительно, компас был изобретён в Китае за 2000 лет до н.э. и использовался для указания направлении движения по пустыням. В Европе изобретение компаса относят к XII—XIII вв., однако устройство его оставалось очень простым — магнитная стрелка, укрепленная на пробке и опущенная в сосуд с водой. В воде пробка со стрелкой ориентировалась нужным образом. В начале XIVв. итальянец Ф. Джойя значительно усовершенствовал компас. Магнитную стрелку он надел на вертикальную шпильку, а к стрелке прикрепил лёгкий круг — катушку, разбитую по окружности на 16 румбов. В XVI в. ввели деление катушки на 32 румба и коробку со стрелкой стали помещать в карданном подвесе, чтобы устранить влияние качки корабля на компас. В XVII в. компас снабдили пеленгатором — вращающейся диаметральной линейкой с визирами на концах, укрепленной своим центром на крышке коробки над стрелкой.
Для примера будет рассмотрен компас Адрианова. Компас Адрианова состоит из корпуса 1, в центре которого на острие иглы помещена магнитная стрелка 3. При незаторможенном состоянии стрелки ее северный конец устанавливается в направлении на Северный магнитный полюс, а южный — на Южный магнитный полюс. В нерабочем состоянии стрелка закрепляется тормозом 6. Внутри корпуса компаса помещена круговая шкала (лимб) 2, разделенная на 120 делений. Цена одного деления составляет 3°, или 50 малых делений угломера (0-50). Шкала имеет двойную оцифровку. Внутренняя оцифровка нанесена по ходу часовой стрелки от 0 до 360° через 15° (5 делений шкалы). Внешняя оцифровка шкалы нанесена против хода часовой стрелки через 5 больших делений угломера (10 делений шкалы). Для визирования на местные предметы (ориентиры) и снятия отсчетов по шкале компаса на вращающемся кольце компаса закреплено визирное приспособление (мушка и целик) 4 и указатель отсчетов 5.
Принцип действия компаса основан на взаимодействии магнитного поля постоянных магнитов компаса с горизонтальной составляющей магнитного поля Земли. Свободно вращающаяся магнитная стрелка поворачивается вокруг оси, располагаясь вдоль силовых линий магнитного поля. Таким образом, стрелка всегда указывает одним из концов в направлении линии магнитного поля, которая идет к Северному магнитному полюсу.
Гирокомпас
Гирокомпас — прибор, указывающий направление на земной поверхности; в его состав входит один или несколько гироскопов. Используется почти повсеместно в системах навигации и управления крупных морских судов; в отличие от магнитного компаса его показания связаны с направлением на истинный географический (а не магнитный) Северный полюс. Обычно гирокомпас применяется как опорное навигационное устройство в судовых рулевых системах с ручным или автоматическим управлением, а также при решении различных задач иного рода, например, для определения точного направления при наводке орудия боевого корабля. Морской гирокомпас, как правило, очень тяжел; в некоторых конструкциях вес гироскопического ротора превышает 25 кг. Для нормальной работы гирокомпаса необходимо устойчивое основание, не испытывающее ускорений и фиксированное относительно земной поверхности, причем скорость его перемещения должна быть пренебрежимо мала по сравнению со скоростью суточного вращения Земли на данной широте.
История создания
Прототип современного гирокомпаса первым создал Г. Аншюц-Кэмпфе (запатентован в 1908), вскоре подобный прибор построил Э. Сперри (запатентован в 1911). В последующие годы разрабатывалось множество гирокомпасов различных модификаций, но наиболее удачные из них принципиально почти не отличались от устройств Аншюца и Сперри. Приборы современной конструкции значительно усовершенствованы по сравнению с первыми моделями; они отличаются высокой точностью и надежностью и удобнее в эксплуатации.
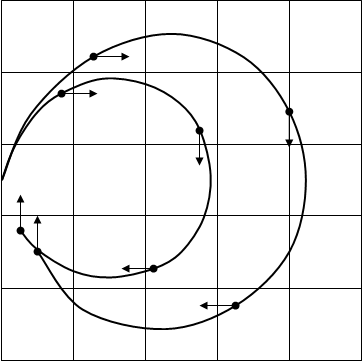
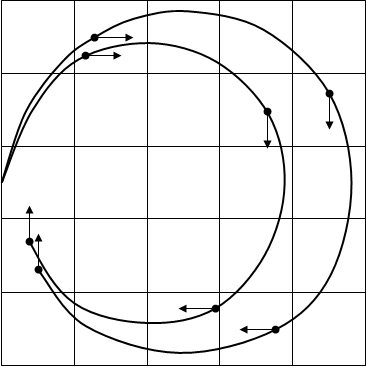
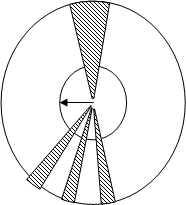
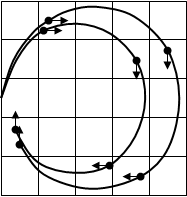
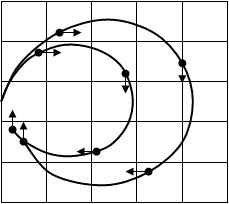
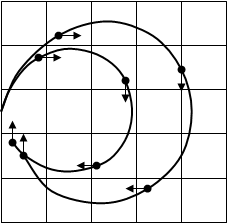
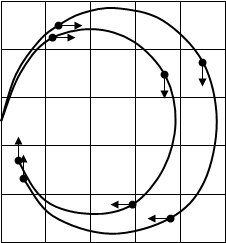
Простейший гирокомпас состоит из гироскопа, подвешенного внутри полого шара, который плавает в жидкости; вес шара с гироскопом таков, что его центр тяжести располагается на оси шара в его нижней части, когда ось вращения гироскопа горизонтальна.
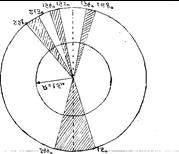
Предположим, что гирокомпас находится на экваторе, а ось вращения его гироскопа совпадает с направлением запад — восток; она сохраняет свою ориентацию в пространстве в отсутствие воздействия внешних сил. Но Земля вращается, совершая один оборот в сутки. Так как наблюдатель, находящийся рядом, вращается вместе с планетой, он видит, как восточный конец (E) оси гироскопа поднимается, а западный (W) опускается; при этом центр тяжести шара смещается к востоку и вверх (позиция б). Однако сила земного притяжения препятствует такому смещению центра тяжести, и в результате ее воздействия ось гироскопа поворачивается так, чтобы совпасть с осью суточного вращения Земли, то есть с направлением север — юг (это вращательное движение оси гироскопа под действием внешней силы называется прецессией). Когда ось гироскопа совпадет с направлением север — юг (N — S, позиция в), центр тяжести окажется в нижнем положении на вертикали и причина прецессии исчезнет. Поставив метку "Север" (N) на то место шара, в которое упирается соответствующий конец оси гироскопа, и соотнеся ей шкалу с нужными делениями, получают надежный компас. В реальном гирокомпасе предусмотрены компенсация девиации компаса и поправка на широту места. Действие гирокомпаса зависит от вращения Земли и особенностей взаимодействия ротора гироскопа с его подвесом.
Электронный компас
Электронный компас в системе навигации NAVSTAR
Здесь рассматривается компас, построенный на принципе определения координат через спутниковые системы навигации. Существуют также компасы, использующие в качестве датчика блок магниторезисторов.
История создания электронного компаса тесно связана с системами спутниковой навигации.
Принцип действия такого компаса весьма прост:
1. На основании сигналов со спутников определяются координаты приёмника системы спутниковой навигации (и, соответственно, объекта)
2. Засекается момент времени, в который было сделано определение координат.
3. Выжидается некоторый интервал времени.
4. Повторно определяется местоположение объекта.
5. На основании координат двух точек и размера временного интервала вычисляется вектор скорости движения и из него:
направление движения
скорость движения
Осуществляется переход к шагу 2.
Ограничения:
Естественно, если объект не перемещается, направление движения узнать не получится. Исключение составляют достаточно большие объекты (например, самолёты), где есть возможность установить 2 приёмника (например, на концах крыльев). При этом координаты двух точек можно получить сразу, даже если объект неподвижен, и перейти к пункту 5.
Ещё одно ограничение обусловлено точностью определения координат спутниковыми системами позиционирования и влияет, главным образом, на тихоходные объекты (пешеходов).
Гироазимут
Гироазимут - навигационное гироскопическое устройство, предназначенное
- для сохранения заданного направления в горизонтальной плоскости, по которому первоначально ориентирована главная ось гироскопа; и
- для измерения углов поворота относительно заданного направления (углов рыскания).
Гироазимут: гироскопический прибор, предназначенный для сохранения заданного азимутального направления. В гироазимуте применяется уравновешивающий гироскоп с 3 степенями свободы, у которого центр тяжести совпадает с геометрическим центром (точкой подвеса), поэтому на гироазимут не влияют силы инерции, возникающие при маневрировании и качке судна. Гироазимуты применяют как курсоуказатели. Для превращения гироскопа в гироазимут, указывающий постоянное направление относительно меридиана, следует рассчитать уход (отклонение) главной оси гироскопа относительно плоскости истинного меридиана и компенсировать его. Эту функцию выполняет азимутальный корректор. Гироскоп не имеет устойчивого равновесного положения относительно горизонтальной системы координат в азимуте, поэтому во всех гироазимутах главная ось гироскопа искусственно удерживается в плоскости горизонта с помощью горизонтального корректора.
Автопрокладчик
Автопрокладчик прибор автоматически прокладывающий курс судна на навигационной карте получая показания курса от гирокомпаса, а данные о пройденном расстоянии от лага.
Согласно общепринятому определению, автопрокладчик, прибор, автоматически прокладывающий курс судна на навигационной карте, получая показания курса от гирокомпаса, а данные о пройденном расстоянии от лага или по сигналам радионавигационной системы. Прежде автопрокладчик называли одографом.
Автопрокладчик - навигационный прибор, автоматически ведущий прокладку на навигационной карте при получении:
- показаний курса от гирокомпаса;
- данных о пройденном расстоянии от лага или по сигналам радионавигационной системы; а также
- поправок на дрейф и течение.
Астрономические приборы навигации
Секстан (Октан)
Секстан [сс1] (происхождение: от лат. sextans, sextantis — шестая часть)— это измерительный инструмент, используемый для измерения величины угла между двумя видимыми объектами. Обычно секстан используется для измерения возвышения астрономического объекта над горизонтом с целью определения географических координат. Например, измерив угол возвышения Солнца в полдень, можно вычислить широту. С помощью секстана можно измерять углы до 140°.
Длина шкалы секстанта составляет 1/6 от полного круга или 60°, отсюда и название секстана. Октант — похожий прибор, но с более короткой шкалой (1/8 круга или 45°), который использовался до 1767, пока его не заменил секстан. В 1767 первое издание навигационного альманаха собрало в своих таблицах лунные расстояния, что позволило навигаторам вычислять текущее время, зная угол между солнцем и луной. Однако, этот угол иногда больше 90°, и поэтому не может быть измерен с помощью октанта.
В секстане используется принцип совмещения изображений двух объектов при помощи двойного отражения одного из них. Этот принцип был изобретён Исааком Ньютоном в 1699 году, но не был опубликован. Два человека независимо изобрели секстан в 1730: английский математик Джон Хадли и американский изобретатель Томас Годфри. Секстан вытеснил астролябию как главный навигационный инструмент.
Секстан увековечен на небе астрономом Гевелием в виде одноименного созвездия.
Современный секстант
Главная особенность, которая позволила секстану вытеснить астролябию, заключается в том, что при его использовании положение астрономических объектов измеряются относительно горизонта, а не относительно самого инструмента. Это дает бо́льшую точность.
При наблюдении через секстан, горизонт и астрономический объект совмещаются в одном поле зрения, и остаются неподвижными относительно друг друга, даже если наблюдатель находится на плывущем корабле. Это происходит, потому что секстан показывает неподвижный горизонт прямо, а астрономический объект — сквозь два противоположных зеркала.
Использование секстана для определения возвышения солнца над горизонтом
Изображение в секстане совмещает в себя два вида. Первый — вид неба через зеркала. Второй — вид горизонта. Секстан используют, регулируя рычаг и установочный винт до тех пор, пока нижний край изображения астрономического тела не коснется горизонта. Точный момент времени, в который проводится измерение, засекает ассистент с часами. Затем угол возвышения считывается со шкалы, верньера и установочного винта, и записывается вместе со временем.
После этого нужно преобразовать данные с помощью некоторых математических процедур. Самый простой метод — нарисовать равновозвышенный круг используемого астрономического объекта на глобусе. Пересечение этого круга с линией навигационного счисления или другим указателем даёт точное местоположение.
Секстан — чувствительный инструмент. Если его уронить, то дуга может погнуться. После падения он может потерять точность.
Секстан - угломерный инструмент отражательного типа для измерения высот небесных светил и углов на земной поверхности. Система зеркал в Секстане обусловливает ход лучей, который исключает ошибку, вызываемую небольшим отклонением плоскости инструмента от плоскости измеряемого угла. Благодаря этому измерение углов Секстана можно производить держа его в руке даже в условиях качки. Идея устройства Секстана принадлежит И. Ньютону (1699),а сконструирован он англичанином Дж. Гадлеем и американцем Т. Годфреем в 1731 г. независимо друг от друга. Помимо мореходной астрономии Секстан используется в навигации и гидрографии для измерения горизонтальных углов между береговыми ориентирами и определения по ним точного местонахождения судна. С помощью навигационного Секстана можно производить измерения с точностью до нескольких десятых долей минуты. Некоторые специальные морские и авиационные Секстаны имеют гироскопические устройства и др. искусственные уровни и приспособления, позволяющие производить астрономические измерения при отсутствии видимого горизонта относительно плоскости истинного горизонта. Для увеличения точности отсчета и упрощения процесса измерения такие Секстаны оборудуют осредняющими механизмами, дающими средний отсчет за время измерений, а некоторые Секстаны имеют устройства, дистанционно регистрирующие моменты измерений и соответствующие им отсчеты.
Квадрант
Квадрант состоит из пластины с делениями для отсчёта углов, проградуированной обычно до π / 2 (четверти окружности), откуда происходит название, и прикреплённой к пластине одним концом планки либо телескопа для фиксации угла.
Лаги и лоты[сс1]
Лот – измеритель глубины
Лот — гидрографический и навигационный прибор для измерения глубины.
Первоначально (во времена парусного флота) в качестве лота использовалась гиря, обычно свинцовая, с тонкой веревкой (лотлинем) для измерения глубины. Лот опускался с носовых русленей судна. Иногда на нижней части гири формировалось углубление, которое смазывали салом, чтобы к нему прилипали частицы грунта для определения характера дна.
Лоты по принципу измерения глубины делятся на ручные, механические и гидроакустические (эхолоты).
Ручной лот представляет собой конический или пирамидальный груз массой 3.5-5 кг, с закреплённым тросом-лотлинем, на который нанесены метровые или футовые метки (марки). Существует разновидность лота — диплот (нидерл. dieplood), который используется для измерения больших глубин, и отличается особо тяжелым грузом в 20-30 кг. Измерение идёт по отсчёту длины лотлиня при ослаблении натяжения в момент касания дна. Недостатком лотов этого типа является необходимость проведения измерений на малой скорости (до 3-5 узлов, т.е. 5-9 км/ч на глубинах до 50 м) или при остановке судна и трудность определения момента касания дна на больших глубинах.
Механический лот представляет собой прибор для измерения гидростатического давления воды у дна, простейший вариант механического лота - вертикальная заполненная воздухом трубка, запаянная с верхней стороны и погружённая нижним открытым концом в воду. Глубина определяется по высоте подъёма воды (например, по смыву или изменению цвета краски, нанесённой на внутренние стенки трубки). Так как вертикальность лотлиня в случае измерений механическим лотом значения не имеет, механический лот может использоваться для измерений глубин до 200 м на ходу (до 16 узлов, т.е. 28 км/ч). Механические лоты для измерения больших глубин называют глубомерными машинами.
Эхолот измеряет глубины по времени прохождения акустического импульса, отражённого от дна.
В настоящее время лоты в качестве навигационных приборов практически повсеместно вытеснены эхолотами, однако при океанографических исследованиях используются лоты-батометры, снабжённые устройствами для измерения температуры, отбора проб воды на глубине и грунтозахватами для отбора проб донного грунта.
Корабельный лаг
Лаг — прибор, предназначенный для измерения скорости движения судна.
В древности в качестве лага использовался (и используется по сей день на небольших судах) ручной, или секторный лаг. Он представляет собой доску треугольной формы (сектор) с привязанной к ней верёвкой (линем, лаглинем) и грузом. На лине на определённом расстоянии друг от друга завязываются узлы. Доска выбрасывается за корму и пересчитывается количество узлов, ушедших за борт за определенное время (обычно 15 секунд или 1 минуту). Отсюда пошло измерение скорости судна в узлах, 1 узел численно равен 1 морской миле в час.
Принцип работы современных приборов основан на измерении напора воды, или гидролокации морского дна. Самый распространенный лаг представляет собой вертушку, вращающуюся под напором воды. Число оборотов вертушки за единицу времени определяется с помощью электронного или механического устройства. Обычно вертушка лага закрепляется на корпусе судна, но на небольших судах используют портативный вариант лага, в котором вертушка выбрасывается за корму на тросе, а измерительный механизм находится в руках у матроса.
Навигационный прибор для измерения, скорости и пройденного судном расстояния относительно воды или грунта. Первый называется относительным лагом, а второй — абсолютным. По принципу действия относительные лаги подразделяют на гидродинамические и индукционные (электродинамические или электромагнитные). Гидродинамические лаги работают по принципу измерения и компенсации гидродинамического давления, возникающего в морской среде при движении судна. Гидравлическое устройство передает полное и статическое давление воды к чувствительному элементу. Последний представляет собой механический дифманометр, который регистрирует гидродинамическое давление (разность полного и статического) и преобразует его в механическое усилие, воздействующее на электромеханическое вычислительное устройство, в котором оно преобразуется в скорость, пропорциональную измеряемому давлению. После введения поправки получается истинная скорость относительно воды, преобразующаяся в вычислительном устройстве в пройденное судном расстояние. Через датчики данные скорости и расстояния подаются на репитеры. В зависимости от чувствительности элемента гидродинамические лаги бывают вертушечные и с механическими и жидкостным (ртутным) дифманометрами. Вертушечные Л. измеряют частоту вращения вертушки в воде при движении судна. По этой частоте определяют пройденное судном расстояние, которое затем пересчитывают в скорость. Механические лаги измеряют скорость судна по величине гидродинамического давления, жидкостные — по высоте столба ртути, пропорциональной давлению. Гидродинамические лаги измеряют скорость судна относительно воды в пределах 2—50 уз (погрешность не более 0,5 уз) и пройденное расстояние (погрешность не более 0,02 мили). Индукционные или электромагнитные лаги измеряют электродвижущую силу, индуцируемую в проводнике, находящемся под воздействием магнитного поля (закон Фарадея). В подводной части судна в герметичном обтекателе установлен электромагнитный (датчик). При движении судна магнитные силовые линии индуцируют в слое морской воды, являющейся хорошим проводником, ЭДС, величина которой пропорциональна скорости судна относительно воды и снимается с помощью установленных по обеим сторонам датчика электродов. Напряжение сигналов, поступающих от датчика, преобразуется и усиливается. Оно может быть подано на специальное устройство, которое вырабатывает импульсы напряжения с частотой, пропорциональной пройденному расстоянию (до 200 на каждую милю). Индукционные лаги имеют более высокую чувствительность (работают при скорости судна от 0,1 до 25—70 уз); могут измерять скорость на переднем и заднем ходу; более просты и надежны в эксплуатации. Точность измерения расстояния составляет 1—2 % пройденного судном пути.
Для измерения скорости относительно дна моря (абсолютный лаг) применяют гидроакустические лаги (как правило, на крупнотоннажных судах для безопасного плавания в открытом море, постановки, съемки с якоря, безопасного подхода судна к причалу при швартовке и др.).
Похожие работы

... информации. Набираемая информация отображается на дисплее, что позволяет контролировать ее правильность. Клавиатура и дисплей АИС должны быть независимыми от других навигационных устройств. Судовыми системами отображения АИС могут быть система отображения электронных карт (ECDIS, ECS, RCDS), РЛС, САРП или дисплей персонального компьютера. АИС и связанные с ней датчики информации питаются от ...


... к северу от заднего створного знака, трубы заводов и отдельные здания города Бердянск. Ограждения. Подходный канал порта Бердянск, а также акватория внутреннего рейда ограждаются светящими буями и вехами. Предупреждение. При входе в порт с подходного канала и при выходе из порта на канал судну приходится делать крутой поворот, поэтому следует соблюдать осторожность и следить за тем, чтобы не ...
... . В случаях ограниченной видимости суда должны следовать каналами под проводкой портовой РЛС, руководствуясь при этом Правилами обслуживания судов радиолокационной станцией “Керчь”. Порт Кальяри Порт Кальяри, сооружен у северного берега залива Кальяри в 20 милях к NNW от мыса Карбонара; он является самым крупным и наиболее защищенным из портов острова Сардиния. Порт доступен для судов длиной до ...
... количество карт с изолиниями системы LORAN-C, это облегчает судоводителю работу по обсервациям в Эгейском море, и также обеспечить определение места судна с требуемой точностью и периодичностью. 1.5 Сведения о портах Порт Измир Порт Измир, второй по грузообороту порт Турции, расположенный в вершине Измирского залива. Приметные пункты: при входе в порт Измир хорошо приметны гора Мимас на ...
0 комментариев