Навигация
Расчет допускаемых контактных напряжений
14757
знаков
0
таблиц
1
изображение
2.2 Расчет допускаемых контактных напряжений
Действительное число циклов нагружений зуба:
NН1 = L · 365 ·24 · n1 ·60 · kc · kг · С1 = 4 · 365 ·24 · 750 ·60 · 0,66 · 0,7 · 5 =
= 364,2 · 107 циклов;
NН2 = L · 365 ·24 · n2 ·60 · kc · kг · С2 = 4 · 365 ·24 · 150 ·60 · 0,66 · 0,7 · 1 =
= 14,6 · 107 циклов;
L = 4 года – срок службы, kс = 0,66 - коэффициент нагрузки в сутки,
kг = 0,7 - коэффициент нагрузки в году,
С1 = Uз.п. = 5, С2 = 1 – число зацеплений зуба за один оборот колеса.
NHO = (3…4) · 107 = 3 · 107 циклов – базовое число циклов.
Коэффициент долговечности КНL:
КНL1 = ![]() =
=  = 0,56; КНL2 =
= 0,56; КНL2 = ![]() =
=  = 0,82
= 0,82
Принимаем: КНL = 1.
SH = 1,2…1,3 – коэффициент безопасности при объемной обработке.
Принимаем: SH = 1,2.
Определим предельные контактные напряжения:
[σ]Hlim1 = (1,8…2,1) НВСР1 + 70 = 2 НВСР1 + 70 = 2 · 290 + 70 = 650 МПа;
[σ]Hlim2 = (1,8…2,1) НВСР2 + 70 = 2 НВСР2 + 70 = 2 · 270 + 70 = 610 МПа.
Определим допускаемые контактные напряжения:
[σ]H1 = ![]() КНL = 650/1,2 = 542 МПа;
КНL = 650/1,2 = 542 МПа;
[σ]H2 = ![]() КНL = 610/1,2 = 508 МПа;
КНL = 610/1,2 = 508 МПа;
Используем прочность по среднему допускаемому напряжению:
[σ]H = 0,5([σ]H1 + ([σ]H2) = 0,5 · (542 + 508) = 525 МПа.
2.3 Расчет допускаемых напряжений изгиба
Действительное число циклов при изгибе:
NF1 = NН1 = 364,2 · 107 циклов;
NF2 = NН2 = 14,6 · 107 циклов;
NFO = 4 · 106 циклов – базовое число циклов при изгибе.
Коэффициент долговечности КFL:
КFL1 = ![]() =
=  = 0,57; КFL2 =
= 0,57; КFL2 = ![]() =
=  = 0,85
= 0,85
Принимаем: КFL = 1.
SF = 1,7 – коэффициент безопасности при изгибе.
КFс = 1- коэффициент реверсивности.
Определим предельные напряжения при изгибе:
[σ]Flim1 = 2 НВСР1 = 2 · 290 = 580 МПа;
[σ]Flim2 = 2 НВСР2 = 2 · 270 = 540 МПа.
Определим допускаемые напряжения при изгибе:
[σ]F1 = ![]() КFL КFс = 580/1,7 = 341 МПа;
КFL КFс = 580/1,7 = 341 МПа;
[σ]F2 = ![]() КFL КFс = 540/1,7 = 318 МПа.
КFL КFс = 540/1,7 = 318 МПа.
Принимаем наименьшее:
[σ]F= 318 МПа.
3. Проектный расчет зубчатой передачи
Uз.п. = 5
Межосевое расстояние:
αω = Кα(Uз.п. + 1)  = 430 · (5 + 1)
= 430 · (5 + 1) ![]() = 133,4 мм.
= 133,4 мм.
Кα = 430 – для шевронной передачи [3].
Ψba = 0,4-0,5 – при симметричном расположении колес, берем: Ψba = 0,4.
Примем: КН = КНβ
Ψbd = 0,5Ψba (Uз.п. + 1) = 0,5 · 0,4 · (5+1) = 1,2
По Ψbd = 1,2 и соотношений твердости материалов колеса и шестерни принимаем: КНβ = 1,24.
Принимаем αω = 125 мм.
Модуль зацепления:
m = (0,01-0,02) αω = 1,25 – 2,5 мм, принимаем m = 2 мм.
Ширина колеса:
b2 = ψва · αω = 0,4 · 125 = 50 мм
b1 = b2 + 5 = 50 + 5 = 55 мм – ширина шестерни.
Минимальный угол наклона зубьев:
βmin = arcsin![]() = arcsin
= arcsin![]() = 8,05°
= 8,05°
При β = βmin сумма чисел зубьев zc = z1 + z2 = (2αω/m)cos βmin = (2 · 125/2)cos 8,05°= 123,77
Округляем до целого: zc = 123
Угол наклона зубьев:
β = arccos![]() = arccos
= arccos![]() = 10,26°,
= 10,26°,
при нем zc = (2 · 125/2)cos 10,26° = 123
Число зубьев шестерни:
z1 = zc / (Uз.п. + 1) = 123 / (5 + 1) ≈ 21
z2 = 123 – 21 = 102 – колеса.
Передаточное число:
Uф = 102 / 21 = 4,9, отклонение ΔU = 0,02U - допустимо.
Диаметры делительных окружностей:
d1 = m z1 /cos β = 2 · 21 / cos 10,26° = 43 мм – шестерни;
d2 = m z2 /cos β = 2 · 102 / cos 10,26° = 207 мм – колеса.
Торцевой (окружной) модуль:
mt = m /cos β = 2 / cos 10,26° = 2,033
Диаметры вершин зубьев:
dа1 = d1 + 2m = 43 + 2 · 2 = 47 мм;
dа2 = d2 + 2m = 207 + 2 · 2 = 211 мм.
Проверочный расчет.
Проверка контактных напряжений.
σН = ZE ZH Zε
Коэффициент жесткости материала:
ZE =  ; Вi = Ei / (1 – μi2).
; Вi = Ei / (1 – μi2).
У колес из стали 35Х:
Е = Е1 = Е2 = 210 ГПа; μ1 = μ2 = 0,3.
ZE = ![]() =
=  =
=  = 5,78 · 104
= 5,78 · 104
Коэффициент формы зуба:
ZН = ![]()
 ; tg αt = tg 20º / cosβ = tg 20º / cos 10,26° = 0,37
; tg αt = tg 20º / cosβ = tg 20º / cos 10,26° = 0,37
αt = 20,3º, β0 = arcsin (sin β · cos 20º) = arcsin (sin 10,26° · cos 20º) = 9,63º
ZН = ![]()
 = 2,45
= 2,45
Коэффициент полной длины линии контакта всех зубьев в зацеплении.
εβ = b2 tgβ / π mt = b2 tgβ cosβ / π m = 50 · tg10,26° · cos10,26° / 3,14 · 2 = 1,42 >1
Zε = ![]() =
= ![]() = 0,77
= 0,77
εα = (1,88 – 3,2 ![]() ) cosβ = (1,88 – 3,2
) cosβ = (1,88 – 3,2 ![]() ) cos10,26° = 1,69
) cos10,26° = 1,69
Окружная сила:
Ft = 2Т2 / d2 = 2 · 304,83 / 207 · 10-3 = 2945 H
Коэффициент внешней силы:
КН = КНβ · КНV · КНα
После уточнения: КНβ = 1,14
КНV = 1 + δН q0 Vt![]()
![]() = 1 + 0,04 · 4,7 · 1,6
= 1 + 0,04 · 4,7 · 1,6![]()
![]() = 1
= 1
δН = 0,04; q0 = 4,7;
окружная скорость:
Vt = d2 ω2 / 2 = 207 · 10-3 · 15,7 / 2 = 1,6 м/с
КНα = КНα (Vt ; степень точности); КНα = 1,04
КН = 1,14 · 1 · 1,04 = 1,19
σН = 5,78 · 104 · 2,45 · 0,77![]() = 169,5 МПа < 525 МПа = [σ]H
= 169,5 МПа < 525 МПа = [σ]H
Проверка напряжения изгиба.
σF = ![]() YFS2 Yβ Yε
YFS2 Yβ Yε
Коэффициент внешней силы:
КF = КFβ · KFV · KFα = 1,13 ·1 · 1,04 = 1,18
КFβ = 1,13
KFV = 1 + δF q0 Vt![]()
![]() = 1 + 0,16 · 4,7 · 1,6
= 1 + 0,16 · 4,7 · 1,6![]()
![]() = 1
= 1
δF = 0,16
KFα = КНα = 1,04
Коэффициент формы (жесткости зуба на изгиб):
YFS2 = YFS2 (ZV1, χ)
Эквивалентное число зубьев:
ZV1 = Z1 / cos3 β = 21 / cos3 10,26° = 22
YFS2 = 3,6
Коэффициент угла наклона оси зуба:
Yβ = 1 – β / 140 = 1 – 10,26 / 140 = 0,927
Коэффициент перекрытия зацепления:
Yε = 1 / εα = 1 / 1,69 = 0,6
σF = ![]() 3,6 · 0,927 · 0,6 = 69,6 МПа < 318 МПа = [σ]F
3,6 · 0,927 · 0,6 = 69,6 МПа < 318 МПа = [σ]F
Похожие работы
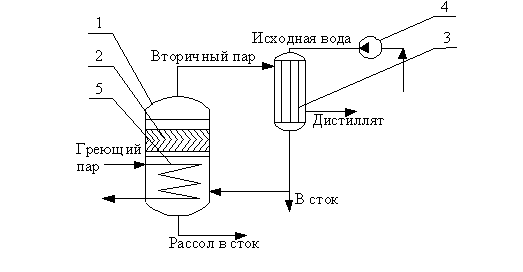
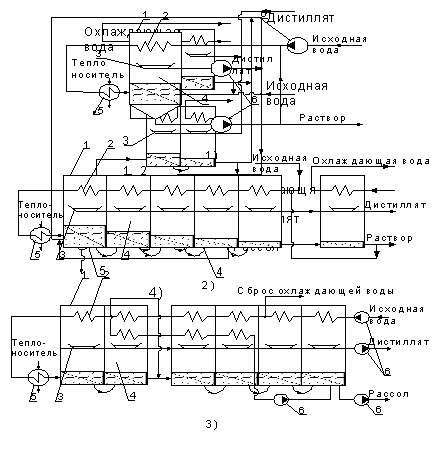
... безопасности. Для этого необходимо выделить всё оборудование и технологии, задействованные в проекте и определить все связанные с ними опасные и вредные производственные факторы. Адиабатная установка термического обессоливания включает в себя следующее оборудование: - камеры испарения со встроенными поверхностными конденсаторами; - конденсаторы; - циркуляционные, конденсатные и вакуумные ...
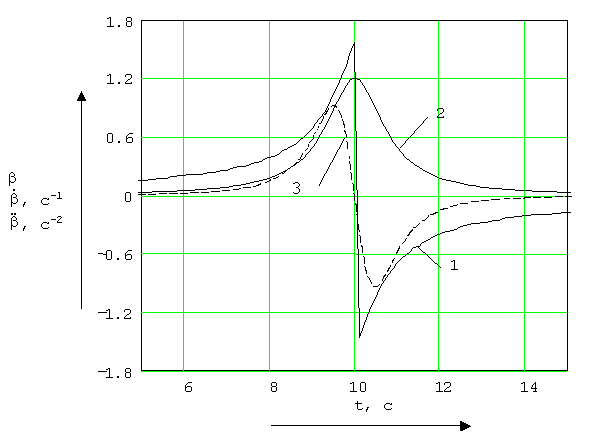
... 2. Тип элементов, входящих в изделие и количество элементов данного типа; 3. Величины интенсивности отказов элементов , входящих в изделие. Все элементы схемы ячейки 3 БУ привода горизонтального канала наведения и стабилизации ОЭС сведены в табл. 13.1. Среднее время безотказной работы блока можно рассчитать по формуле: (13.5) где L - интенсивность отказов БУ следящего привода. ...
... характеристик решим графо-аналитическим методом, который основан на построении ряда последовательных положений звеньев механизма и соответствующих им планов скоростей. Механизм привода пресс-автомата с плавающим ползуном в масштабе μL=0,006 м/мм изобразим в двенадцати положениях. Положение механизма задаётся положением кривошипа 1. Каждое последующее положение кривошипа 1 отличается от ...
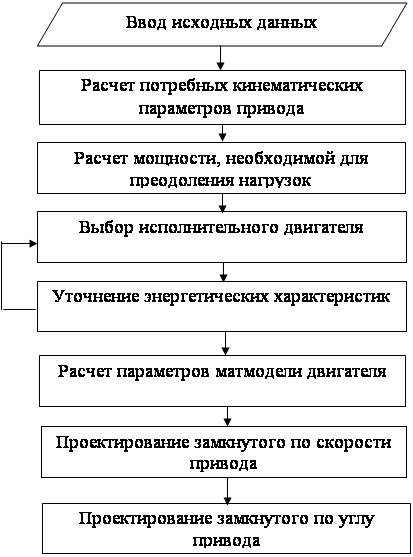
... СМАЗКИ 7. ВЫБОР СИСТЕМЫ УПРАВЛЕНИЯ ЗАКЛЮЧЕНИЕ ПЕРЕЧЕНЬ ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ ВВЕДЕНИЕ Приводы металлорежущих станков выполняют широкий спектр движений: рабочих, вспомогательных, установочных и т.д. При этом перемещается инструмент или заготовка. Кинематические и силовые характеристики коробки скоростей должны обеспечить требуемые значения величины скоростей при обработке на ...
0 комментариев