Любая из точек локального минимума унимодальной функции является и точкой ее глобального минимума на отрезке [а; b]
Пример решения методами дихотомии и золотого сечения
Численные методы многомерной безусловной оптимизации
Поиск точки min методом циклического покоординатного спуска
Основы линейного программирования
Навигация
Поиск точки min методом циклического покоординатного спуска
Сравнительный анализ методов оптимизации
22076
знаков
78
таблиц
12
изображений
3.3 Поиск точки min методом циклического покоординатного спуска
Этот метод заключается в последовательной минимизации целевой функции f (x) сначала по направлению первого базисного вектора е1, затем второго – е2 и т.д. После окончания минимизации по направлению последнего базисного вектора еn цикл повторяется.
Опишем этот алгоритм.
Шаг 0. Выбрать х Î En , критерий достижения точности, величину e. Найти f (x), положить j= 1.
Шаг 1. Решить задачу одномерной минимизации Ф(a) = f (х + aеj)® min, a Î R, т.е. найти a*. Положить ![]() = х +a*еj, вычислить f (х).
= х +a*еj, вычислить f (х).
Шаг 2. Если j < п, то положить х =![]() , j=j+1 и перейти к шагу 1, иначе – перейти к шагу 3.
, j=j+1 и перейти к шагу 1, иначе – перейти к шагу 3.
Шаг 3. Проверить условие достижения точности ||х–![]() || < e
|| < e
3.4 Поиск точки min методом Хука – Дживса
Этот алгоритм содержит две основные процедуры:
а) исследующий покоординатный поиск в окрестности данной точки, предназначенный для определения направления убывания f (х);
б) перемещение в направлении убывания.
Опишем алгоритм исследующего покоординатного поиска из заданной точки х с приращениями по каждой координате Dj , j = 1, …, n
Шаг 1. Положить ![]() = x , i = 1.
= x , i = 1.
Шаг 2. Сделать пробный шаг y=![]() – Dje j, где e j –j–й базисный вектор. Если f (
– Dje j, где e j –j–й базисный вектор. Если f (![]() ) £ f (y), то перейти к шагу 3, иначе – к шагу 4.
) £ f (y), то перейти к шагу 3, иначе – к шагу 4.
Шаг 3. Сделать пробный шаг y=![]() +Dje j . Если f (
+Dje j . Если f (![]() ) £ f (y), то перейти к шагу 5, иначе – к шагу 4.
) £ f (y), то перейти к шагу 5, иначе – к шагу 4.
Шаг 4. Положить ![]() = у.
= у.
Шаг 5. Положить j = j + 1. Если j £ n, то перейти к шагу 2. В противном случае исследующий поиск окончен – получена точка ![]() для которой f (
для которой f (![]() ) < f (y), если
) < f (y), если ![]() ¹ х.
¹ х.
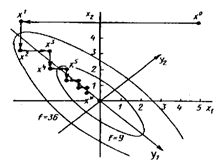
3.5 Пример решения методами правильного симплекса, деформируемого симплекса, покоординатного спуска, Хука – Дживса
Дана функция ![]() , с=7; d=7.
, с=7; d=7.
Найти минимум функции с точностью ε=0,001
Метод правильного симплекса
Выбираем длину стороны треугольника l=10ε=0,0001
Вершины треугольника находим следующим образом:
A(![]() );
);
B(![]()
![]() );
);
D(![]()
![]() ).
).
A(1,065; 0,918);
B(1,07,0,927);
D(1,075,0,918).
Шаг 0
F(A)=10,903; F(B)=11,081; F(D)=11,051.
F1<F2<F3:
F1=F(A); F2=F(D); F3=F(B).
Отражаем вершину 3 относительно центра тяжести.
![]()
F(E)=10,873.
Значение функции в найденной точке меньше, значения функции в точке 1, поэтому принимаем новый симплекс (1,2,E).
Шаг 1
F(1)=10,903; F(2)=11,081; F(E)=10,873.
F1<F2<F3:
F1=F(E); F2=F(1); F3=F(2).
Отражаем вершину 3 относительно центра тяжести.

F(E)=10,726.
Значение функции в найденной точке меньше, значения функции в точке 1, поэтому принимаем новый симплекс (1,2,E).
![]() ,
,
![]() .
.
В результате получаем x1=0,125, x2=0,208, f(x1, x2)=-0,41.
Метод деформируемого симплекса
Выбираем длину стороны треугольника l=5ε=0,005
Вершины треугольника находим следующим образом:
A(![]() );
);
B(![]()
![]() );
);
D(![]()
![]() ).
).
A(1,065; 0,918);
B(1,07,0,927);
D(1,075,0,918).
Принимаем коэффициенты выбора пробных точек k1=0,5, k2=1, k3=2.
Шаг 0
F(A)=10,903; F(B)=11,081; F(D)=11,051.
F1<F2<F3:
F1=F(A); F2=F(D); F3=F(B).
Находим центр тяжести вершины 3 относительно вершин 1 и 2:
Выбираем пробные точки:

F(z1)=10,966.

F(z2)=11,018.

F(z3)=11,044.

F(z3)=11,097.
Значение функции в z1 точке меньше, значения функции в точке 3, поэтому принимаем новый симплекс (1,2,z1).
Шаг 1
F(1)= 10,903; F(2)= 11,051; F(z1)=10,966.
F1<F2<F3:
F1=F(1); F2=F(z1); F3=F(2).
Выбираем пробные точки:

F(z1)=10,955.

F(z2)=10,998.

F(z3)=11,019.

F(z3)=11,062.
Значение функции в точке z1 меньше, значения функции в точке 3, поэтому принимаем новый симплекс (1,2,z1).
![]() ,
,
![]() .
.
В результате получаем x1=-0,012, x2=0,419, f(x1, x2)=-0,014.
Метод покоординатного спуска
(1,065; 0,918).
![]()
α=5ε=0,005.
Шаг 1
Координату ![]() закрепляем,
закрепляем,
![]()
![]()
Т.к.![]()
![]() ,
,
Следовательно ![]()
![]()
![]()
![]()
![]()
![]()
Получим x1=0,012, ![]()
Шаг 2
Принимаем ![]() и закрепляем,
и закрепляем,
![]()
![]()
Т.к.![]()
![]() ,
,
![]()
![]()
![]()
![]()
![]()
![]()
Получим x2=0,199, ![]()
Продолжаем поиск до тех пор, пока не будет выполнено условие ![]()
В результате получаем x1=0,117, x2=0,189, f(x1, x2)=-0,411.
Метод Хука-Дживса
x0: (1,065; 0,918).
![]()
Δ1=5*ε=5*0,001, Δ2=5*ε=5*0,001.
λ=2.
Шаг 1
Принимаем k1=-1, k2=-1 – коэффициенты, определяющие направление поиска.
![]()
![]()
![]()
В данном направлении функция убывает.
Шаг 2
Принимаем k1=-1, k2=-1.
![]()
![]()
![]()
В данном направлении функция убывает.
Продолжаем поиск до тех пор, пока не будет выполнено условие ![]()
В результате получаем x1=0,115, x2=0,198, f(x1, x2)=-0,411.
Похожие работы
... МП к некритическому экстраполированию результата считается его слабостью. Сети РБФ более чувствительны к «проклятию размерности» и испытывают значительные трудности, когда число входов велико. 5. МОДЕЛИРОВАНИЕ НЕЙРОННЫХ СЕТЕЙ ДЛЯ ПРОГНОЗИРОВАНИЯ СТОИМОСТИ НЕДВИЖИМОСТИ 5.1 Особенности нейросетевого прогнозирования в задаче оценки стоимости недвижимости Использование нейронных сетей можно ...
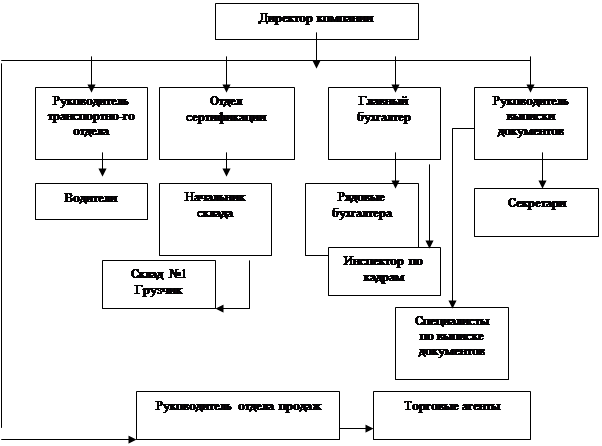
... с издержками двух или трех конкурентов. Это позволит выявить конкурентоспособность предприятия, определить имеющиеся резервы для снижения издержек. Подобный сравнительный анализ издержек производства на данном предприятии и предприятиях-конкурентах служит основанием для разработки и проведения стратегических мероприятий по снижению издержек производства и оптимизации производственной программы. ...
... от года-x и от номера месяца в году-y следующим образом: F(x)=50-x2+10x-y2+10y. Определите, в каком году и в каком месяце прибыль была максимальной. Зав. кафедрой -------------------------------------------------- Экзаменационный билет по предмету МЕТОДЫ ОПТИМИЗАЦИИ Билет № 22 1) Постановка вариационной задачи с ограничениями. Привести пример. 2) Дайте геометрическую ...
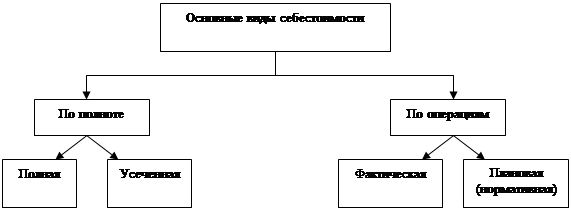
... ) аппарат, а затем полученную величину корректируют с учетом других факторов (долгосрочная стратегия предприятия, ограничения по производственным мощностям и пр). 3. Рекомендации по оптимизации величины себестоимости продукции на основе анализа соотношения "затраты - объем - прибыль" 3.1 Деление затрат на постоянные и переменные части и определение показателей маржинального дохода ...
0 комментариев