Навигация
2.2 Вес клина
Вес клина определяем по формуле:
![]() (2.5)
(2.5)
где б – угол наклона рабочей поверхности клина к вертикали, принимаем б = 10° /4, стр. 126/;
ср. – коэффициент сопротивления качению ролика по плоскости клина, ср. = 0,2 (при подшипниках) /4, стр. 127/.
![]() ;
;
2.3 Ход клина
Ход клина влияет на канатоёмкость барабана лебёдки подъёма клина. Ход клина определяется величиной отхода планок клещей от головки рельса и упругим прогибом рычагов. Учитывая неточность стыковки рельсов, отход планок губок принимаем для перегружателей 8 мм.
Общий ход клина /рис. 4/
![]() (2.6)
(2.6)
где kx – коэффициент запаса хода клина, компенсирующий износ планок, а также неточности изготовления и монтажа, kx = 1,5 /4, стр. 128/;
![]() – ход клина, определяемый зазором между планкой рычага и рельсом;
– ход клина, определяемый зазором между планкой рычага и рельсом;
![]() – ход клина, определяемый упругим прогибом рычага клещей;
– ход клина, определяемый упругим прогибом рычага клещей;
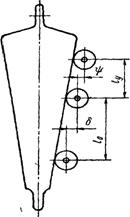
Рис. 4. Схема к определению хода клина
Ход клина, определяемый зазором между планкой рычага и рельсом, определяется по формуле:
![]()
где ![]() – ход верхнего конца рычага при отходе нижнего конца на величину Д.
– ход верхнего конца рычага при отходе нижнего конца на величину Д.
Ход клина, определяемый упругим прогибом рычага клещей, определяется по формуле:
![]() ;
;
где ![]() – прогиб верхнего конца рычага под действием усилия T.
– прогиб верхнего конца рычага под действием усилия T.
Тогда общий ход клина:
![]()
2.4 Механизм подъёма клина

2.4.1 Выбор каната
![]() (2.7)
(2.7)
где U – кратность полиспаста /рис. 2/, U = 1;
з – к.п.д. полиспаста, з = 1;
Q – вес клина, кг, Q = Gкл = 682,6 кг;
Необходимое разрывное усилие
![]() ; (2.8)
; (2.8)
где k – коэффициент запаса прочности, k = 4 /2, стр. 55/
Принимаем канат ЛК–З /1, стр. 247/: диаметр каната dк = 8,1 мм; площадь сечения всех проволок F = 24 мм2; разрывное усилие F0 = 31,9 кН.
2.4.2 Выбор барабана
Диаметр барабана
Dб = dк e = 8,1 16 = 130 мм; (2.9)
где e = 16 (для барабана) /1, стр. 250/.
Принимаем диаметр барабана Dб = 130 мм.
Длина барабана
![]() (2.10)
(2.10)
где Lк – длина каната, Lк = 2,082 м; /2, стр. 60/;
t – шаг витка, мм, t = 10 мм/ 2, стр. 60/;
m – число слоёв навивки, m = 1;
ц – коэффициент не плотности навивки, ц = 0,9 (для гладких барабанов) /2, стр. 60/
![]()
Принимаем длину барабана Lб = 60 мм.
2.4.3 Выбор двигателя
Статическая мощность механизма
![]()
![]() (2.11)
(2.11)
где з – к.п.д. механизма, з = 0,97
Vп – скорость подъёма клина, м/сек, Vп. = 0,2 м/сек.
Принимаем двигатель MTF 011–6 /1, стр. 241/ с характеристикой:
мощность N = 1,4 кВт;
число оборотов nд. = 885 об/мин;
максимально развиваемый момент М = 39 Нм;
момент инерции ротора Jр = 0,021 кг·м2;
масса m = 51 кг.
2.4.4 Выбор редуктора
Передаточное число механизма подъёма клина
 (2.12)
(2.12)
где nб – частота вращения барабана, определяется по формуле:
![]()
![]() (2.13)
(2.13)
![]() Тогда
Тогда
Принимаем редуктор Ц2–250 с передаточным числом равным 31,5 /1, стр. 218/.
2.4.5 Выбор тормоза
Необходимый тормозной момент
![]() (2.14)
(2.14)
где k – коэффициент запаса, k = 1,5 /2, стр. 66/
Принимаем тормоз ТКГ–160 /1, стр. 284/ с тормозным моментом
Mт =100 Нм.
2.4.6 Выбор муфты
Принимаем муфту упругую втулочно–пальцевую, с номинальным вращающим моментом Мт= 63 Нм, /6, стр. 191/ способную компенсировать незначительные погрешности взаимного расположения соединяемых валов, и смягчать динамические нагрузки.
3. Расчёт на прочность рычага противоугонного захвата
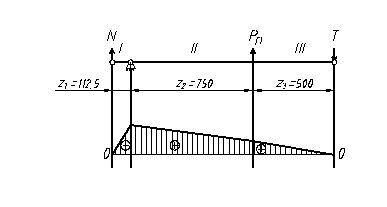
Рис. 5. Схема к определению прочности рычага
Рассмотрим I – участок
![]() ,
,
при z1 = 0, Mизг = 0,
при z1 = 0,1125, Mизг = 162,8 • 0,1125 = 18,31 кН;
Рассмотрим II – участок
![]() ,
,
при z3 = 0, Mизг = 0,
при z3 = 0,5, Mизг = 17,055 • 0,5 = 8,52 кН;
Рассмотрим III – участок
![]() ,
,
при z3 = 0, ![]() ;
;
при z3 = 0,75, ![]()
Опасное сечение в точке А.
Рычаги изготавливают литыми из Ст3 по ГОСТ 380–71
Допускаемые напряжения [у] = 120 МПа
Условие прочности
![]() (3.1)
(3.1)
Отсюда
![]()
![]()
Принимаем сечение рычага двутавр.
Список используемых источников
1 Справочник по кранам: В 2 т.Т.1. Характеристики материалов и нагрузок. Основы расчета кранов, их приводов и металлических конструкций / Под общ. ред. М.М. Гохберга. – М.: Машиностроение, 1988
2 Справочник по кранам: В 2 т.Т.2. Характеристики материалов и нагрузок. Основы расчета кранов, их приводов и металлических конструкций / Под общ. ред. М.М. Гохберга. – М.: Машиностроение, 1988
3 Справочник по расчётам механизмов подъёмно–транспортных машин А.В. Кузьмин Ф.Л. Марон. – Минск: “ Высш. шк.”, 1983. – 347 с.
4 Курсовое проектирование грузоподъёмных машин: Учеб. пособие для студентов машиностр. спец. вузов/С.А. Казак, В.Е. Дусье, Е.С. Кузнецов и др.; Под ред. С.А. Казака. – М.: Высш. шк., 1989. – 319 с.: ил.
5 Мостовые перегружатели. М., “Машиностроение”, 1974, 224 с. Авт.: Беглов Б.В., Кох П.И., Онищенко В.И., Окулов Д.П., Эбич Р.Д., Зискис А.Я.
6 Шабашов А.П., Лысяков А.Г. Мостовые краны общего назначения.
– 5-е изд., перераб. и доп.-М.: Машиностроение, 1980.– 304 с., ил.
7 Анурьев В.И. Справочник конструктора–машиностроителя. В 3-х т. Т. 2. –5-е изд., перераб. и доп.-М.: Машиностроение, 1979.– 559 с., ил.
8 Абрамович И.И., Котельников Г.А. Козловые краны общего назначения. – 2-е изд., перераб. и доп.-М.: Машиностроение, 1983.– 232 с., ил.
9. Правила устройства и безопасной эксплуатации грузоподъемных кранов. ПБ 10-382-00. Утверждены постановлением Госгортехнадзора России от 31.12.1999г. N 38.
Похожие работы
... обычно размещают на границе района или же за его пределами. В мастерских производится периодический контроль и мелкий ремонт некоторых перегрузочных и транспортных устройств. Административно-диспетчерские объекты находятся в различных местах контейнерного пункта, в их состав входят различные учреждения и бюро, ВЦ, специальные помещения, контрольные вышки и пр. Приемо-сдаточные объекты находятся ...
0 комментариев