Навигация
Принципы построения механизмов, их структура
42296
знаков
3
таблицы
6
изображений
5. Принципы построения механизмов, их структура
Механизм (см. выше) состоит из тел, подвижно соединенных между собой. Тела (за исключением особо оговоренных случаев) будем считать абсолютно твердыми. Твердое тело – совокупность материальных точек, находящихся на неизменном расстоянии друг от друга. Материальная точка в отличие от геометрической обладает массой [4].
Звеном (жестким) механизма назовем одно или несколько твердых тел, не имеющих движения друг относительно друга. Неподвижные тела механизма образуют неподвижное звено – стойку. Остальные звенья – подвижные и изменяют в процессе движения положения друг относительно друга и по отношению к стойке.
Звенья механизма соединены между собой подвижно. Соединение двух звеньев, позволяющее совершать то или иное движение по отношению друг к другу, называется кинематической парой.
В местах соединения двух звеньев им придают определенные геометрические формы, чтобы обеспечить требуемый характер относительного движения. Кинематические элементы (элементы кинематической пары) представляют совокупность точек, линий и поверхностей, которыми звенья непрерывно касаются и характер соприкосновения которых определяет вид относительного движения соединяемых звеньев. Совокупность таких кинематических элементов и представляет кинематическую пару.
Свободное твердое тело имеет шесть степеней свободы и может совершать шесть независимых видов (w) движения: три вращательных движения вокруг осей x, y, z и три поступательных вдоль этих осей. Если рассматриваемое тело (звено) образует кинематическую пару с другим, число независимых параметров w, определяющих относительное движение выражается неравенством 6 > w > 0. При w = 0 соединение двух тел является неподвижным, при w = 6 тела не соединены друг с другом. Таким образом, кинематическая пара устанавливает связи (ограничения) в относительном движении.
Если число геометрических связей, накладываемых кинематической парой, обозначить через s, то s = 6 – w.
Кинематические пары делятся на классы. Класс кинематической пары равен числу наложенных связей. При определении класса кинематической пары необходимо учитывать только независимые виды движения. Так, винтовая пара (рис. 2.1) относится к классу V, так как составляющие винтовое движение поступательное и вращательное движения нельзя рассматривать как независимые, поскольку на них наложена связь, определяемая уравнением
s = t ´ j,
где s – перемещение вдоль оси винта,
t – винтовой параметр, t = p / (2´p), здесь p – шаг винта,
j – угол поворота.
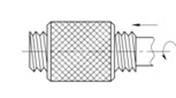
Рис. 2.1. Винтовая пара
По характеру соприкосновения пары делятся на высшие и низшие. В высших парах соприкосновение по линии или точкам, в низших – по поверхностям.
При обращении движения звено кинематической пары, бывшее в относительном движении подвижным, становится неподвижным.
Для того, чтобы звенья кинематической пары непрерывно касались друг друга, нужно предусмотреть так называемое замыкание кинематической пары. Различают: силовое замыкание, осуществляемое за счет веса, пружин; геометрическое замыкание, достигаемое приданием определенных геометрических форм кинематическим элементам.
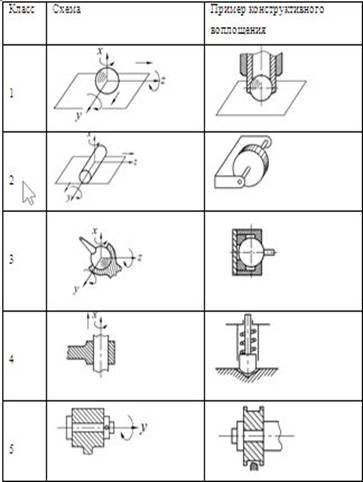
Классификация кинематических пар и примеры их конструктивного воплощения приведены в таблице 2.4.
Совокупность звеньев, соединенных кинематическими парами, представляет кинематическую цепь. Различают открытые и замкнутые кинематические цепи. В замкнутой кинематической цепи в отличие от открытой последнее звено соединено с первым [4].
Таблица 2.4.
Классификация кинематических пар
Кинематическая цепь становится механизмом, как только одно из звеньев обращается в стойку (неподвижное звено). В кинематической цепи определенными являются только относительные движения звеньев. В механизме, если заданы движения одного или нескольких его звеньев, становятся определенными абсолютные (относительно стойки) движения остальных его звеньев.
Таким образом, механизм представляет кинематическую цепь, в которой одно из звеньев обращено в стойку, а при задании движения одного или нескольких его звеньев, становятся определенными движения остальных его звеньев.
Из одной и той же кинематической цепи можно получить различные механизмы, последовательно обращая в стойку различные звенья цепи. Образуемые таким образом механизмы будут отличаться характером абсолютных движений звеньев. Относительное же движение звеньев в механизмах не изменится, поскольку они образованы из одной и той же кинематической цепи.
На примере (рис. 2.2, а) цифрами обозначены звенья кинематической цепи (стойки нет), буквами – кинематические пары (О и А – вращательные, В и С – поступательные). Обратив в стойку звено 4 (рис. 2.2, б) получим механизм двойного ползуна (синусный механизм). При обращении в стойку звена 3 (рис. 2.2, в) получим механизм эллипсографа (звено 4 имеет различное графическое изображение, но его кинематические пары одни и те же). Если стойкой сделать звено 1, получим кулачково-дисковую муфту (муфту Ольдгэма), конструктивная схема которой изображена ниже (рис. 2.2, е).
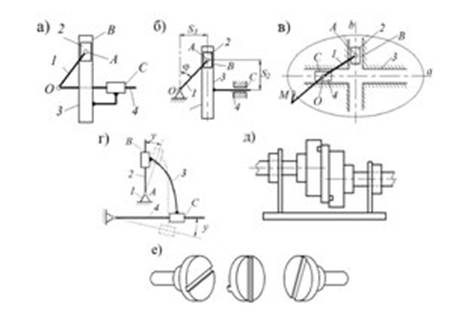
Рис. 2.2. Преобразование кинематической цепи
Различают плоские и пространственные механизмы. В плоских механизмах все точки звеньев движутся в одной или параллельных плоскостях. Наиболее распространенные типы плоских механизмов: четырехшарнирный, кривошипно-ползунный, кулисный (рис. 2.3) [4].
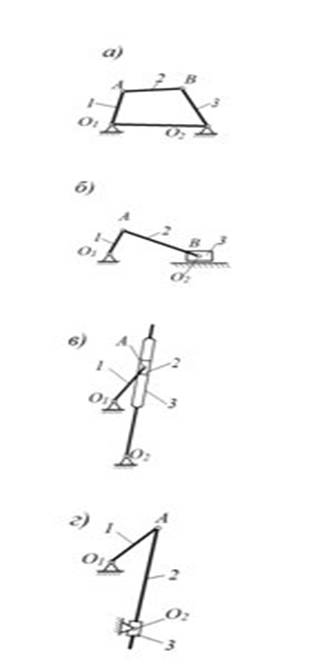
Рис. 2.3. Схемы плоских механизмов
Кривошипом (поз. 1 на рис. 2.3) называется звено, соединенное со стойкой вращательной парой и совершающее относительно стойки полное вращательное движение. Коромысло (поз. 3 на рис. 2.3, а) также соединено со стойкой вращательной парой, но совершает относительно нее неполное вращательное (качательное) движение. Кулисой (поз. 3 на рис. 2.3, в, г) называется звено с подвижными направляющими, соединенное со стойкой вращательной или поступательной парой. Ползун (поз. 3 на рис. 2.3, б) соединен со стойкой поступательной парой и совершает поступательное движение. Звено (поз. 2 на рис. 2.3, а, б), совершающее относительно стойки плоское (совокупность поступательного и вращательного) движение и соединенное с другими звеньями вращательными парами, называется шатуном.
В кулисном механизме (рис. 2.3, в) звенья 2 и 3 могут иметь разное конструктивное оформление. Звено 2 совершает поступательное движение в направляющих кулисы и называется кулисным камнем.
Под степенью подвижности механизма понимается число независимых параметров, которое необходимо задать для определения положения всех подвижных звеньев. Грубо говоря, это число двигателей, необходимое для получения на выходе механизма определенного движения (каждый двигатель – одна координата, параметр). В механизме с одной степенью подвижности достаточно задаться значением одного параметра для определения положения всех подвижных звеньев Преимущественное распространение получили механизмы с одной и двумя (дифференциальный зубчатый механизм) степенями подвижности.
При аналитическом определении степени подвижности составляется система сложных нелинейных уравнений связи между параметрами относительного движения.
Практически степень подвижности механизма определяется из его структурной формулы, связывающей степень подвижности с числом звеньев механизма, числом и видом кинематических пар. Для пространственного механизма структурная формула определяется выражением
w = 6 ´ (n - 1) – 5 ´ p5 – 4 ´ p4 – 3 ´ p3 –2 ´ p2 –1 ´ p1 ,
где (n - 1) – число подвижных звеньев (n – общее число звеньев, включая и стойку),
pi – число кинематических пар класса i, входящих в состав механизма,
i – число связей, накладываемых парой класса i.
Для плоских механизмов при определении степени подвижности можно использовать структурную формулу Сомова и Чебышева:
w = 6 ´ (n - 1) – 5 ´ p5 – 4 ´ p4.
При проектировании таких механизмов заранее предопределяется, что их звенья не могут совершать трех движений (из коэффициентов вычитается 3): вращений вокруг осей x и y и поступательного движения вдоль оси z, перпендикулярной плоскости xy (т.е. накладываются три общих для всех звеньев связи).

Рис. 2.4. Механизм эллипсографа
При проектировании механизмов нужно исключить возможность появления избыточных связей, при которых может возникнуть заклинивание механизма. Примером является механизм эллипсографа: произвольные точки отрезка BD описывают эллипсы, и только его середина (т. А) движется по окружности (рис. 2.4, а). Из структурной формулы (n =5, p5 = 6) следует, что w = 0. Если точку А сместить от середины отрезка, то действительно w = 0. Поэтому целесообразно изменить структуру механизма, изъяв звено ОА (и кинематические пары О и А) или один из ползунов 3 или 4 (кинематические пары, соединяющие ползун со стойкой и шатуном) (рис. 2.4, б). К избыточным связям могут приводить погрешности изготовления и сборки.
Похожие работы
... широкозахватные сельскохозяйственные машины и агрегаты, в том числе предназначенных для тракторов класса 3. 1. Обоснование тягово–энергетической концепции трактора 1.1 Исследование путей повышения производительности сельскохозяйственных машинно-тракторных агрегатов Проведенные авторами исследования путей повышения производительности сельскохозяйственных машинно-тракторных агрегатов ...
... пара, газа, шума, вибрации поражение электрическим током; использование предохранительных средстви блакировочных устройств и другие мероприятия, обеспечивающие создание безопасных условий труда. Типовые требования должны учитываться не только при проектировании и постройке новых машин, механизмов и подвижного состава, но и при их модернизации, а также производстве заводского ремонта. Периодически ...
... этого полная готовность и окончание ремонта технических средств, задействованных на этих работах, должна быть закончена на 10-15 дней раньше начала работ на случай изменения сроков прихода весны. Сезонное техническое обслуживание машин и механизмов и сроки их проведения также приурочены к периоду перехода среднесуточной температуры воздуха отметок +4 оС, +5 оС. В первой декаде мая среднесуточная ...
... возникают при падениях отдельных грузовых мест (ГМ), соударениях грузов в процессе выполнения ПРР, под воздействием вибраций и колебаний ПС при неустановившихся режимах вождения. Физико-химические свойства характеризуют состояние груза, его способность вступать во взаимодействие с окружающей средой, вредно воздействовать на ПС, складские емкости, ПРМ, другие грузы, а также на здоровье людей. ...
0 комментариев