Навигация
Контур управления и его анализ
31430
знаков
2
таблицы
9
изображений
3. Контур управления и его анализ
Радиотелемеханической системой называется совокупность устройств, предназначенных для управления состоянием и работой различных приборов и агрегатов. Такие системы находят широкое применение как в оборонной технике, так и в народном хозяйстве.
В комплексах летательных аппаратов радиотелемеханические системы используются для управления бортовыми приборами и агрегатами, а также состоянием летательных аппаратов в целом. Такое управление осуществляется подачей на исполнительные устройства приборов и агрегатов (объектов управления) соответствующих команд. Команды формируются на основе контроля (измерения) некоторой в общем случае многомерной величины g(t), которая непосредственно или косвенно характеризует либо условия, в которых находится объект управления, либо текущее состояние объекта.. Для осуществления такого контроля в состав радиотелемеханических систем включаются либо те или иные радиоизмерительные устройства, либо датчики-преобразователи неэлектрических величин в электрические. Формирование команд осуществляется в решающих устройствах, которые в простейших случаях представляют собой схемы сравнения и реле, а в более сложных - счетно-решающие приборы и системы обработки результатов измерений. Команда поступает на управляемый объект через исполнительное устройство. Исполнительные устройства могут быть самыми разнообразными как по принципу действия, так и по сложности.
Существуют автономные и неавтономные радиотелемеханические системы. В первых команды формируются на борту летательного аппарата, во вторых - на пункте управления и передаются на борт летательного аппарата по командной радиолинии.
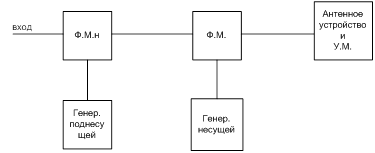
Автономные радиотелемеханические системы обычно осуществляются как системы, предназначенные для выполнения в комплексе летательного аппарата определенных разовых функций. Эти функции выполняются по разовым командам в реальном масштабе времени; они имеют разовый и необратимый характер, т.е. исполняются один раз, в результате чего управляемый объект переходит в такое состояние, из которого не может вернуться к исходному. Обратная связь в подобных радиотелемеханических системах обычно отсутствует. Функциональная схема автономной радиотелемеханической системы приведена на рисунке.

Рис. 2
Измеряемая, монотонно нарастающая (или убывающая) величина g(t) непрерывно воспринимается бортовым радиоизмерительным устройством. Результат измерения обрабатывается в бортовом решающем устройстве и сравнивается с некоторой пороговой величиной gпор. В момент совпадения этих величин (g(t)= gпор) выдается разовая команда в виде скачка напряжения или в виде импульса, поступающая на исполнительное устройство. С выхода исполнительного устройства осуществляется управляющее воздействие Fy(t) на объект управления.
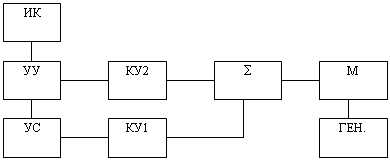
Неавтономные радиотелемеханические системы осуществляются как без обратной связи, так и с обратной связью. В обоих случаях на пункте управления принимается решение о формировании команды и осуществляется ее формирование. Сформированная команда Uк’(t) в реальном масштабе времени или через программно- временное устройство поступает на вход радиоканала разовой команды или командной радиолинии, а затем передается на борт летательного аппарата.
Неавтономные радиотелемеханические системы без обратной связи по выполняемым функциям обычно аналогичны автономным радиотелемеханическим системам. Однако радиоизмерительное устройство, контролирующее величину g(t),находится здесь на пункте управления.
Примером неавтономной радиотелемеханической системы без обратной связи может служить радиосистема выключения двигателя баллистической ракеты при ее пуске на заданную дальность. Такая система включает в себя: радиосистему траекторных измерений на активном участке траектории, решающее устройство, радиоканал разовой команды, исполнительное устройство выключения двигателя и объект управления - ракетный двигатель.
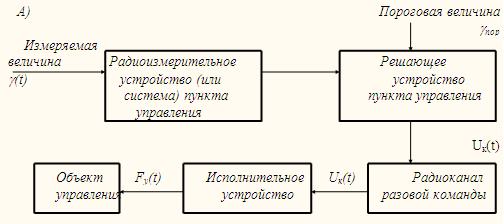
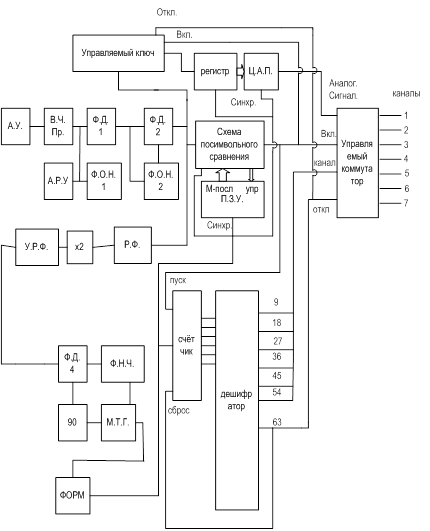
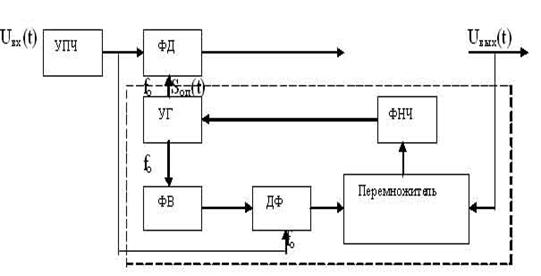
А)Функциональная схема неавтономной радиотелемеханической системы.
Рис. 3
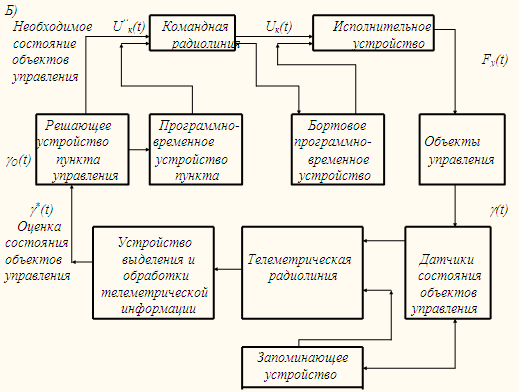
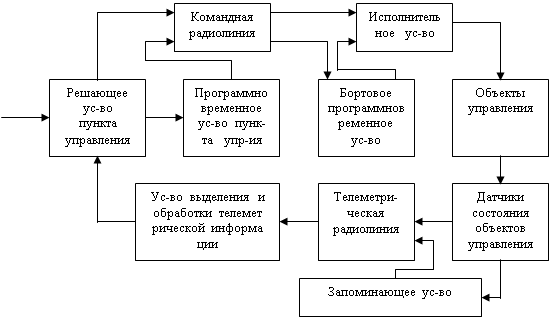
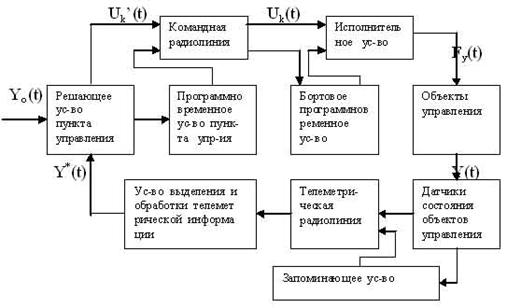
Б) Функциональная схема р/телемеханической системы с обратной связью.
Рис. 4
В радиотелемеханических системах с обратной связью информацию о состоянии и работе объектов управления - бортовых приборов и агрегатов- получают с помощью различного рода датчиков, устанавливаемых на борту летательного аппарата и связанных с контролируемыми величинами g(t). Полученные с датчиков и соответствующим образом обработанные величины поступают непосредственно или через запоминающее устройство на вход телеметрической радиолинии и передаются по ней на пункт управления. На пункте управления в устройстве выделения и обработки телеметрической информации получается оценка состояния объектов управления g*(t), необходимая для осуществления требуемого управления бортовыми приборами и агрегатами. Формирование команд осуществляется в результате сравнения оценки g*(t) c величиной gО(t), задающей необходимое состояние объектов управления. Сформированные команды по командной радиолинии передаются на борт летательного аппарата и поступают на исполнительное устройство, воздействующее на объекты управления. Контур радиотелемеханического управления оказывается замкнутым. В зависимости от решаемых задач, такое управление осуществляется либо как следящее, либо как корректирующее.
Применение радиотелемеханических систем с обратной связью наиболее характерно для управления бортовой аппаратурой космических аппаратов.
Похожие работы

... = 6300 Гц @6.3 кГц Вид группового сигнала: В первом приближении ширина спектра КИМ-ФМ-ФМ определяется шириной главного лепестка: Df = 2 * (1 / t ) = 2 * 1 /159 *10-6с = 12579Гц = 12.6 кГц 3. Расчет энергетического потенциала радиолинии Энергетическим потенциалом радиолинии называется отношение средней мощности сигнала к спектральной плотности шума, пересчитанное ко входу приемника. ...
... : 2.4 Расчет энергетического потенциала Энергетическим потенциалом радиолинии называется отношение средней мощности сигнала к спектральной плотности шума, пересчитанное ко входу приемника. В задании курсового проектирования задана линия с расстоянием между приемником и передатчиком 200 км. Зададимся, что это линия Земля - управляемый объект. Линия связи подобного типа предназначена для ...
... применяется посимвольный прием. Рисунок 1. Функциональная схема радиолинии КИМ-ФМ Необходимо знать - скорость передачи информации R (двоичных единиц в секунду), энергетический потенциал радиолинии, закон изменения несущей частоты из-за нестабильности передатчика и движения передающего и принимающего пунктов. Предполагается также, что символы в КИМ сигнале могут считаться независимыми, а ...
... . Российские летательные аппараты, совершившие посадку на Венеру в 1982 г., послали на Землю цветные фотографии с изображением острых скал. Благодаря парниковому эффекту, на Венере стоит ужасная жара. Атмосфера, представляющая собой плотное одеяло из углекислого газа, удерживает тепло, пришедшее от Солнца. В результате скапливается большое количество тепловой энергии. Цифровая радиолиния с ...
0 комментариев