Исходные данные для проектирования
Общая электротехническая часть
Нас
Расчет и выбор электродвигателей
Расчет и выбор осветительных установок
Размещение осветительных приборов в освещаемом пространстве
< 3.5 м < 4,5 м
Построение графика электрических нагрузок и определение мощности на вводе
Расчет и выбор электропроводок силового электрооборудования и электроосвещения
Определение допустимых потерь напряжения в сети 0,38 кВ
Расчет электрических нагрузок объекта
Расчет и выбор компенсирующих устройств
Разработка функциональной схемы автоматизации
Расчет и выбор аппаратов защиты
Экономическая часть
Критерий эффективности капиталовложений
Навигация
Разработка функциональной схемы автоматизации
Электрооборудование свинарника-откормочника на 600 голов СТФ СПК "Первое Мая" Осиповичского района Могилевской области с разработкой схемы управления и защиты электропривода кормораздачи
104552
знака
26
таблиц
11
изображений
3.1.2 Разработка функциональной схемы автоматизации
Функциональные схемы автоматизации являются функциональным техническим документом, поясняющим определенные процессы, протекающие в системе, определяющим структуру и уровень автоматизации технологического процесса (оснащение приборами и средствами автоматизации, организации пунктов контроля, защиты и управления, оснащение средствами сбора и обработки, а также передачи полученной информации).
Функциональная схема автоматизации связана непосредственно с технологией производства и технологическим оборудованием и как правило, показывается размещение технологического оборудования.
Технологическое оборудование на функциональных схемах должно соответствовать своей действительной конфигурации, но изображается упрощенно. Изображение технологического оборудования и трубопроводов должно показывать их взаимное расположение, взаимосвязи между ними и взаимодействие с приборами и средствами автоматизации.
Порядок составления функциональной схемы следующий:
1. Схематически показываем технологическую схему мобильного кормораздатчика КЭС–1.7.
2. Устанавливаем технологические параметры, подлежащие автоматическому регулированию и контролю.
3. Определяем технологическое оборудование (привода, механизмы) управляемые автоматически или дистанционно.
4. Размещаем приборы и аппаратуру на щитах или непосредственно у агрегатов.
Реализуя эти требования, строим функциональную схему автоматизации, которая приведена на рисунке 3.2.
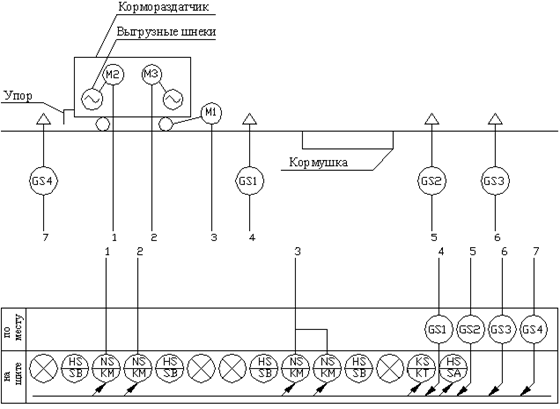
Рисунок 3.2. Функциональная схема мобильного кормораздатчика КЭС–1.7
3.1.3 Разработка принципиальной электрической схемы автоматизации
Схема управления должна обеспечивать:
1. Управление линией в автоматическом и ручном режимах, их разделение, осуществляющее исключение возможности работы в нескольких режимах одновременно.
2. Отключение исполнительных органов при кратковременном снятии напряжения со схемы питания, без последующего автоматического включения при подаче напряжения.
3. Осуществление включения исполнительных механизмов в порядке протекания технологического процесса, осуществления от неправильных действий обслуживающего персонала.
4. Осуществление световой сигнализации, контролирующей порядок протекания технологического процесса.
Разработаем алгоритм управления оборудованием технологической линии.
Рассмотрим описание цикла работы технологической линии раздачи корма при помощи кормораздатчика КЭС–1.7.
Линию в работу включает оператор при помощи кнопочного поста. Включение контакта кнопочной станции кратковременное, при этом кормораздатчик включается и перемещается к началу кормушек, где он останавливается, двигатель привода движения реверсируется, и включаются выгрузные шнеки транспортеров, т.е. происходит раздача корма. В конце кормушек выгрузные шнеки останавливаются. Через некоторое время включается реверс привода движения кормораздатчика, и он возвращается в исходное положение.
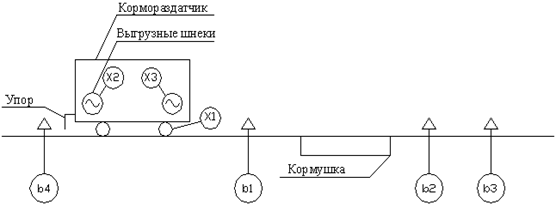
Для обеспечения формализации процесса релейно–контактной схемы (РКС) необходимо от рабочих органов и механизмов перейти к исполнительным органам системы управления. В схемах управления исполнительные органы обозначаем буквой – Xi, реле времени – Zi, а его контакт – Zґi, датчик, который приводится в действие от внешнего воздействия – bi, кнопочную станцию – ai.
Заменим исполнительные органы и механизмы новыми обозначениями, и составим новую технологическую схему раздачи корма электромобильным бункерным кормораздатчиком КЭС–1.7 в выше описанной последовательности. Даная схема предоставлена на рисунке 3.3.
Составим таблицу, в которой приведем буквенные обозначения командных, исполнительных и промежуточных органов релейно-контактной схемы.
Таблица 3.2. Буквенные обозначения командных и промежуточных органов
| Обозначение элемента | Назначение элемента РКС | Механизм, управляющий элементом, место установки элемента |
| 1 | 2 | 3 |
| Х1 Х2 Х3 Х4 Z1 Zґ1 b1 b2 b3 b4 a1 | Катушка магнитного пускателя привода кормораздатчика «вперед». Катушка магнитного пускателя привода выгрузного шнека 1. Катушка магнитного пускателя привода выгрузного шнека 2. Катушка магнитного пускателя привода кормораздатчика «назад». Катушка реле времени. Контакт реле времени. Конечный выключатель включающий выгрузные транспортеры. Конечный выключатель отключающий выгрузные транспортеры. Конечный выключатель отключающий электропривод движения «вперед». Конечный выключатель отключающий электропривод движения «назад». Контакт кнопочной станции, включающий привод кормораздатчика движения «вперед». | Кормораздатчик Выгрузной шнек 1 Выгрузной шнек 2 Кормораздатчик Щит управления Щит управления Выгрузные транспортеры Выгрузные транспортеры Кормораздатчик Кормораздатчик Щит управления |
Следующим шагом в направлении алгоритмизации технологического процесса является его описание при помощи символов.
В таблице 3.3 приведем некоторые символы и операции, позволяющие связать элементы РКС временной или иной зависимостью.
Таблица 3.3. Символы операций и действий
| Наименование операций, условия их выполнения | Символ | Пример |
| Элемент изменяет исходное состояние Элемент возвращается в исходное состояние Последовательные операции Параллельные операции (начало) Параллельные операции (завершение) Механизм совершает вращение – по часовой стрелке – против часовой стрелки Механизм совершает движение «вперед» Механизм совершает вращение «назад» | ↑ ↓ –
→ ← | ↑Х ↑b ↓Х ↓b ↑Х – ↑b
|
Используя словесное описание технологического процесса, заменяя механизмы соответствующими элементами, составим символическое описание для нашего примера.
Проверяем реализуемость схемы, для чего каждому элементу присваиваем «весовое» состояние. Первому элементу – 1, вес каждого последующего элемента удваивается.
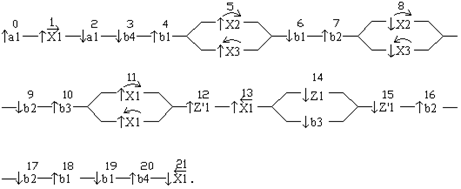
Производим алгебраическое суммирование весовых состояний элемента, где для элементов со стрелкой ↑ ставим знак «+», а для элементов со стрелкой ↓ ставим знак «–». Конечное весовое состояние для выполнения реализуемости схемы должно равняться нулю.
Т.е. в нашем случае весовое состояние схемы в конечном случае получается равным нулю, что свидетельствует о правильном составлении алгоритма управления, а также численности и последовательности проходящих технологических включений.
Произведем составление частных таблиц включений.
Для дальнейшей формализации процесса разработки РКС управления кормораздатчиком, переходим к составлению частных таблиц включений. Они представляют собой особую запись цикла в виде таблицы, в которой последовательные во времени операции указываются в вертикальных столбцах – тактах, следующих один за другим, и за каждым электрическим элементом системы закреплена своя горизонтальная строка. При этом переход от одного такта к другому предлагает изменение состояния хотя бы одного из элементов (для общей таблицы включений).
Частные таблицы составляются для всех исполнительных элементов, приводов, реле времени и промежуточных логических реле в порядке их срабатывания. Такт, предшествующий включению исполнительного механизма называется тактом срабатывания. Такт, предшествующий такту отключения механизма, называется тактом отключения. Изменение исходного состояния (включение или отключение) элемента в таблице включений обозначается знаком «плюс», возвращение в исходное состояние – знаком «минус».
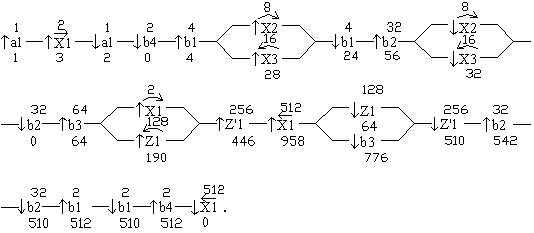
Для облегчения анализа состояний элементов в тактах таблицы включения, каждому элементу присваиваем код (число), который определяется по формуле.
N=2n-1, (100)
где N – код элемента;
n – порядковый номер элемента в частной таблице включений.
Составляем частную таблицу включений для исполнительного элемента Х1, промежуточного элемента U1, от включения которого срабатывает исполнительный элемент, а также промежуточный элемент b3 от состояния которого этот исполнительный элемент отключится.
Таблица 3.4. Частная таблица включений для исполнительного элемента Х1
| Номер элемента n | Код элемента N | Элементы | Такты | |||||||||||||||||||||
| 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 | 17 | 18 | 19 | 20 | 21 | |||
| 1 2 3 | 1 2 4 | X1 U1 b3 | + | + | – | + | – | – | ||||||||||||||||
| Коды состояния тактов | 2 | 3 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 5 | 4 | 4 | 4 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | ||
Частные таблицы включения для исполнительных элементов Х2 и Х3 будут идентичны, т.к. Х2 и Х3 включаются в работу и отключаются одновременно (параллельно друг другу) от одних и тех же промежуточных элементов b1 и b2.
Таблица 3.5. Частная таблица включения для исполнительных элементов Х2 и Х3
| Номер элемента n | Код элемента N | Элементы | Такты | |||||||||||||||||||||
| 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 | 17 | 18 | 19 | 20 | 21 | |||
| 1 2 3 | 1 2 4 | X2, Х3 b1 b2 | + | + | – | + | – | – | + | – | + | – | ||||||||||||
| Коды состояния тактов | 0 | 0 | 0 | 0 | 2 | 3 | 1 | 5 | 4 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 4 | 0 | 2 | 0 | 0 | 0 | ||
| 4 | 8 | Х1 | + | – | ||||||||||||||||||||
| Коды состояния тактов | 0 | 8 | 8 | 8 | 10 | 11 | 9 | 13 | 12 | 8 | 8 | 0 | 0 | 0 | 0 | 0 | 4 | 0 | 2 | 0 | 0 | 0 | ||
Подсчет кодов состояния показывает, что код 5 (такт отпускания) больше нигде не повторяется, а код 2 (такт срабатывания) повторяется в 18 такте, значит таблица состояний для элементов Х2, Х3 не реализуема. Для того, чтобы ликвидировать повторение тактовых кодов, необходимо ввести дополнительный промежуточный элемент, который мы можем включить и выключить в любом такте частной таблицы.
В нашем случае для устранения зоны нереализуемости дополнительно в частную таблицу включении вводим элемент Х1, который включается до зоны нереализуемости, а выключается в зоне нереализуемости. Подсчет кодов состояния показывает, что коды 10 (такт срабатывания) и 13 (такт отпускания) больше нигде не повторяются, а значит, частная таблица включений реализуема.
Составляем частную таблицу включений для исполнительного элемента Х4. В нее, кроме элемента Х4, входит промежуточный элемент Zґ1, от состояния которого исполнительный элемент включается, а также промежуточный элемент b4, от состояния которого исполнительный элемент отключается.
Таблица 3.6. Частная таблица включений для исполнительного элемента Х1
| Номер элемента n | Код элемента N | Элементы | Такты | |||||||||||||||||||||
| 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 | 17 | 18 | 19 | 20 | 21 | |||
| 1 2 3 | 1 2 4 | X4 Zґ1 B4 | – | + | + | – | + | – | ||||||||||||||||
| Коды состояния тактов | 0 | 0 | 0 | -4 | -4 | -4 | -4 | -4 | -4 | -4 | -4 | -4 | -2 | -1 | -1 | -3 | -3 | -3 | -3 | -3 | 1 | 0 | ||
Подсчет кодов состояний показывает, что код 2 (такт срабатывания и код 1 (такт отпускания) больше нигде не повторяются, а значит частная таблица составленная для элемента Х4 реализуема.
Составляем частную таблицу включений для исполнительного элемента Z1. В нее кроме Z1, входит промежуточный элемент b3. От состояния, которого исполнительный элемент включается, а также промежуточный элемент Х4, от состояния которого исполнительный элемент отключается.
Таблица 3.7. Частная таблица включений для исполнительного элемента Z1| Номер элемента n | Код элемента N | Элементы | Такты | |||||||||||||||||||||
| 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 | 17 | 18 | 19 | 20 | 21 | |||
| 1 2 3 | 1 2 4 | Z1 b4 Х4 | + | + | + | – – | – | |||||||||||||||||
| Коды состояния тактов | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 2 | 3 | 3 | 7 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | 0 | ||
Подсчет кодов состояний показывает, что коды 2 (такт срабатывания) и 7 (такт отпускания) больше нигде не повторяются, значит таблица составленная для элемента Z1 реализуема.
Для включения любого исполнительного элемента необходимо обеспечить замкнутое состояние цепочки управления этим элементом в такте срабатывания.
Согласно теории релейных устройств в эту цепочку необходимо последовательно включить все элементы, входящие в частную таблицу включений без исполнительного элемента. Последовательное включение элементов соответствует операции умножения в алгебре логики. Это логическое произведение называется функцией срабатывания fср элемента. В такте отпускания цепь управления элементов должна быть разомкнута так же, как и для всех остальных тактов отключенного состояния элементов, исключая такт срабатывания.
Логическое произведение контактов элементов, входящих в частную таблицу включения, должно в такте отпускания обеспечить замкнутую цепь. Это логическое произведение называется функцией fотп, т.е. функцией отпускания. Для реализации функций fср и fотп замкнутые контакты элементов, входящих в логическое произведение, записываем из частной таблицы включений без инверсий, а разомкнутые – с инверсией.
Из структурной теории релейных устройств известна общая формула для определения первоначальной структуры цепи управления, какого-либо элемента Х:
![]() , (101)
, (101)
где f ср (X) – логическое произведение контактов элементов в тактах
срабатывания, обеспечивающих замкнутую цепь элемента, для которого составляется структурная формула;
![]() – логическое произведение контактов элементов в тактах
– логическое произведение контактов элементов в тактах
отпускания, обеспечивающих замкнутую цепь элемента, для которого составляется структурная формула.
Первоначальная структура цепи управления для исполнительного механизма Х1 будет иметь вид:

Для исполнительных элементов Х2, Х3:

Для исполнительного элемента Х4:
![]()
Для исполнительного элемента Z1:
![]()
В горизонтальные строки таблиц покрытий вписываем все слагаемые произведения, имеющиеся в первоначальных структурных формулах, элементов а в вертикальные столбцы номера тактов включенного состояния данного элемента, в такт числа и номер такта срабатывания, т.е. от такта срабатывания до такта отпускания.
Таблица 3.8. Таблица покрытий для элемента Х1
| Произведение | Такты | |||||||||
| 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | |
|
| ||||||||||
|
| ||||||||||
|
| ||||||||||
![]()
Таблица 3.9. Таблица покрытий для элемента Х2, Х3
| Произведение | Такты | ||
| 4 | 5 | 6 | |
|
| |||
|
| |||
|
| |||
|
| |||
![]()
![]()
Таблица 3.10. Таблица покрытий для элемента Х4
| Произведение | Такты | |||||||
| 12 | 13 | 14 | 15 | 16 | 17 | 18 | 19 | |
|
| ||||||||
|
| ||||||||
|
| ||||||||
![]()
В последнюю очередь составляем таблицу покрытий для исполнительного элемента Z1, осуществляющим управление кормораздатчиком по суточной программе.
Таблица 3.11. Таблица покрытий для элемента Х1
| Произведение | Такты | ||
| 10 | 11 | 12 | |
|
| |||
|
| |||
|
| |||
![]()
Произведем нормализацию состояния контактов.
Под нормализацией имеется в виду выполнение требований оформления принципиальных электрических схем, где контакты приборов и аппаратов, а также всех коммутационных устройств на схеме показывают в нормальном положении, когда отсутствует ток во всех целях схемы и внешние принудительные воздействия на механические части подвижных контактов.
Исходя из таблиц покрытия 3.8 – 3.11 структурные формулы и структурные релейно-контактные схемы управлением исполнительными элементами будут иметь вид:
Для элемента Х1:
![]()

Рисунок 3.4. Упрощенная схема управления кормораздатчиком, движение «вперед» в автоматическом режиме
Для элементов Х2 и Х3:
![]()
![]()
Соответственно для данных элементов составляем упрощенные структурные схемы управления выгрузными шнеками, приведенные на рисунке 3.5.

Рисунок 3.5. Упрощенные структурные схемы управления выгрузными шнеками в автоматическом режиме
Для элемента Х4:
![]()

Рисунок 3.6. Упрощенная структурная схема управления кормораздатчиком, движение «назад» в автоматическом режиме
Для элемента Z1:
![]()
![]()
Рисунок 3.7. Упрощенная структурная схема управления работой реле времени в автоматическом режиме
Зная условные буквенные обозначения отдельных элементом, а также зная их графическое обозначение, принятое в типовых электрических схемах автоматизации управления технологическими процессами, и применяемые при составлении электрических принципиальных схем управления, составляем электрическую принципиальную схему управления электромобильным бункерным кормораздатчиком КЭС–1.7 в автоматическом режиме. Данная схема приведена на рисунке 3.8.
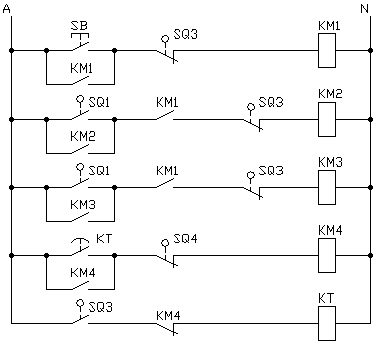
Рисунок 3.8. Принципиальная схема управления мобильным кормораздатчиком КЭС–1.7 в автоматическом режиме
Разрабатываем полную принципиальную электрическую схему управления кормораздатчиком КЭС–1.7 в автоматическом режиме.
При переходе от упрощенной схемы к полной принципиальной схеме автоматизации необходимо учесть ряд факторов, определяющих ее окончательную структуру:
– действительное состояние органов управления в исходном (отключенном) состоянии схемы;
– действительное наличие контактов у всех элементов схемы управления (наличие ручного и наладочного режимов, схем контроля и сигнализации);
– дополнительные аппараты аварийного отключения;
– действительное наличие контактов у всех элементов схемы управления;
– аппараты выбора необходимого режима работы системы управления, устраняющие наличие управления в нескольких режимах;
– дополнительные аппараты аварийного отключения.
Для управления реверсивным электроприводом движения кормораздатчика применим электрическую блокировку исключающую одновременную работу двух пускателей.
Предусмотрим ручной режим управления при помощи кнопочных постов. Для осуществления работы кормораздатчика в автоматическом и ручном режиме, а также для контроля за технологическим процессом раздачи кормов предусматриваем установку универсального переключателя и ламп световой сигнализации.
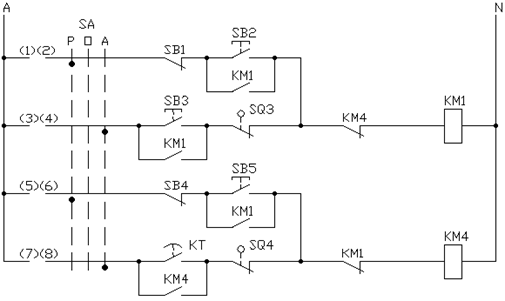
Рисунок 3.9. Управление электроприводом в ручном и автоматическом режимах
Разработку остальных цепей управления ведем аналогичным образом с добавлением необходимых элементов. Произведем описание работы полной принципиальной электрической схемы управления.
При помощи автоматического выключателя QF1 подаем напряжение на схему управления. Рассмотрим работу схемы в автоматическом режиме, для чего автоматический переключатель SA ставим в положение А. Линию в работу включает оператор кнопочной станцией при помощи кнопки SB3, в результате чего получает питание магнитный пускатель КМ1, замыкаются его контакты КМ1.2 (осуществляем шунтирование кнопки SВ4), КМ1.3, КМ1.4 (для подготовки к пуску КМ2 и КМ3) и в цепи магнитного пускателя КМ4 размыкается контакт КМ1.5. кормораздатчик по средством запитки КМ2 начинает движение «вперед». При начале движения кормораздатчика конечный выключатель SQ4 возвращается в исходное положение подготавливая КМ4 к пуску. При подходе кормораздатчика к кормушкам, он посредством упора воздействует на конечный выключательSQ1 и через его контакты SQ1.1 и SQ1.2 получают питание магнитные пускатели КМ2 и КМ3, в работу включаются выгрузные шнеки кормораздатчика. В конце кормушки кормораздатчик воздействует через упор на конечный выключатель SQ2 и размыкаются контакты SQ2.1 и SQ2.2, обесточиваются магнитные пускатели КМ2 и КМ3, выгрузные шнеки останавливаются. Освободив кормушку кормораздатчик воздействует упором на конечный выключатель SQ3. В цепи км1 размыкается контакт SQ3.1, КМ1 обесточивается и кормораздатчик останавливается. В цепи реле времени КТ замыкается контакт SQ3.2, в результате чего оно срабатывает и через 2 сек. запитывает через свой контакт КТ, магнитный пускатель КМ4, осуществляющего привод движения кормораздатчика «назад». Контакт реле времени КТ шунтируется замыкающим контактом КМ4.2, и катушка реле времени обесточивается, т. к. размыкается контакт КМ4.3. В цепи КМ1 размыкается контакт электрической блокировки КМ4.4. По возвращении кормораздатчика в исходное состояние он упором воздействует на конечный выключатель SQ4, в результате чего обесточивается КМ4 и кормораздатчик останавливается и вновь готов к работе.
Заменим некоторые части релейно-контактной схемы на элементы и устройства импульсной и цифровой электроники, а в часности произведем управление тележкой кормораздатчика при помощи a контроллера фирмы mitsubishi, выбор производим по числу коммутируемых входов и выходов.
Для программирования контроллера воспользуемся пакетом AL-PSC/WIN-E.
0 комментариев