Навигация
Схема сопряжения микроконтроллера с фотоимпульсным датчиком
34159
знаков
4
таблицы
15
изображений
4 Схема сопряжения микроконтроллера с фотоимпульсным датчиком
Основным элементом ФИД является прозрачный диск с нанесенными на него рисками, количество которых достигается нескольких тысяч. При повороте диска, луч света, излучаемый источником ИС, модулируется рисками и воспринимается фотоприемниками ФП. Электрические сигналы от ФП преобразуются электронным преобразователем ЭП в систему электрических сигналов, которые подаются на микроконтроллер.
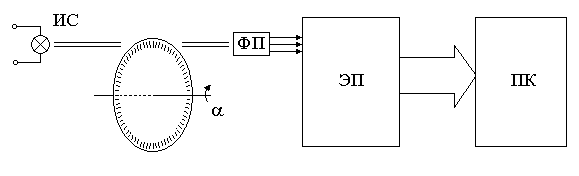
Схема фотоимпульсного датчика скорости
В качестве электронного преобразователя рассматривается следующая схема сопряжения ФИД с цифровой системой.
 Структурная схема сопряжения ФИ датчика
Структурная схема сопряжения ФИ датчика
с цифровой системой управления
4.1 Гальваническая развязка
В качестве гальванической развязки возможно применение
- трансформаторы
- оптопары
Используется оптопара, выполненная на микросхеме… Каждая оптопара ставится на каждый канал фотоимпульсного датчика.
4.2 Мажоритарный элемент
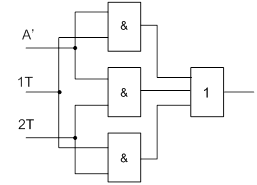
Имеет нечетное число входов и один выход. Сигнал на выходе элемента получает то значение, которое имеется не большинстве его входов. Если необходимо создать мажоритарный элемент на какое-либо количество входов, то необходимо суммировать все сигнал от элементов «И», на входы которых подаются все комбинации входных сигналов от большинства.
Поскольку мажоритарный элемент используется для выявления и устранения кратковременных импульсных помех, то сначала необходимо выполнить сдвиг информационного сигнала на некоторое количество тактов.
Сдвиг информационного сигнала можно выполнить на D-триггерах (в данном проекте используется 3 D-триггера для одного канала сигналов).
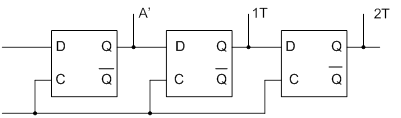
Схема сдвига сигнала
Для данной схемы возможно всего 3 комбинации:
| A’ | 1T | 2T |
| 1 1 0 | 1 0 1 | 0 1 1 |
Следовательно, необходимо 3 элемента «И» и одни «ИЛИ». Схема мажоритарного элемента будет иметь вид (см. рисунок 12).
4.3 Схема выделения импульсов
Широко распространена схема выделения импульсов, собранная на мультиплексорах. Для определения входных данных мультиплексора составляются диаграммы входных импульсов (см. рисунок 10). Поскольку задан датчик без умножения, то будем считать, что выходной импульс формируется по фронту сигнала А.
Диаграмма этих сигналов при вращении вправо и влево показана на рисунке11. При этом необходимо обеспечить, чтобы при движении вправо при каждом переходе входного сигнала происходит прибавление 1http://www.unilib.neva.ru/dl/532/k9-2-1.gif в счетчике, а при движении влево – вычитание 1. Таким образом, в счетчике ПК формируется код угла поворота Na или его приращения.

Поскольку задан датчик без умножения, то разрядность счетчиков равна 10.
Используются три микросхемы 4-разрядных реверсивных двоичных счетчиков К555ИЕ7, соединенных по схеме увеличения разрядности.
Для передачи данных в микроконтроллер используются 2 микросхемы буферных регистров К555ИР33
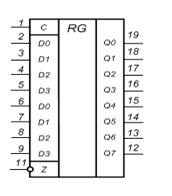
Запись данных в регистр производится с приходом такта на вход С. Для чтения информации с МК на вход Z подается сигнал H-уровня. При этом выходы регистра переходят из высокоимпедансном состояния в обычное.
5 Расчет потребляемого тока от источника питания
Токи, потребляемые элементами, входящими в состав микроконтроллера для обработки дискретных сигналов, приведены в таблице 5.
Таблица 5
| Микросхема | Наименование элемента | Количество элементов | Потребляемый ток, мА |
| DD1 | AT89C5131A-L | 1 | 25 |
| DD2 | MCP4921 | 1 | 24 |
| DD3 | AD7949 | 1 | 50 |
| DD4 | КР580ВД79 | 1 | 60 |
| DD5 | К555ИД3 | 1 | 35 |
| DD6-DD8 | К555ИЕ7 | 3 | 3*20 |
| DD9-DD10 | К555ИР33 | 2 | 2*20 |
| DD11 | К555ТМ8 | 1 | 15 |
| DD12 | К555ТМ9 | 1 | 18 |
| DD13 | К555КП2 | 1 | 10 |
| DD14 | К555ЛЛ1 | 1 | 10 |
| DD15-DD16 | К555ЛИ1 | 2 | 11.5*2 |
| HG1-HG9 | АЛС348А | 10 | 8*10 |
Суммарный ток, потребляемый элементами микроконтроллера от источников питания, составляет ![]() 395мА.
395мА.
РАСЧЕТ БЛОКА ПИТАНИЯ
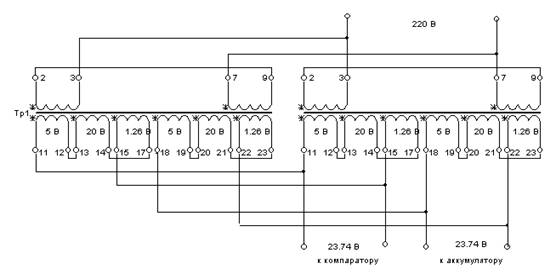
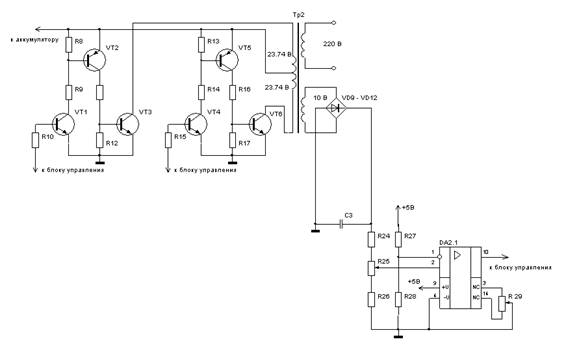
Блок питания должен быть хорошо отфильтрован и стабилизирован /1/. Поэтому применяется схема двухполупериодного выпрямления со стабилизатором на интегральных микросхемах (рисунок 4.1.). Необходимо получить выходное напряжение для питания микросхем +5В, +12В и –12В. При этом двух полярное напряжение необходимо для питания операционных усилителей, а остальные микросхема работают при напряжении +5В.
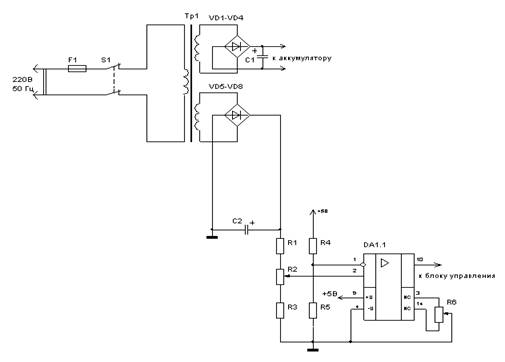
Схема блока питания приведена на рисунке 21.
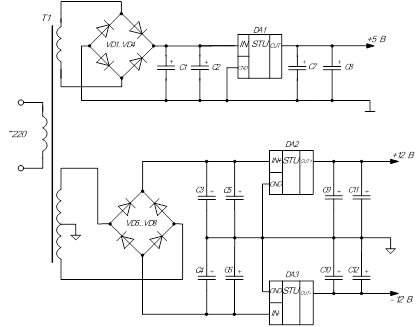
Схема блока питания
Понижающий трансформатор Т1 необходим для гальванической развязки питания цифровой и аналоговой частей. В качестве схемы выпрямления используется диодный мост КЦ405Е (100В, 1А). Напряжение снимается с микросхем стабилизаторов: MC78L05 с выходным напряжением Uвых=5 В; MC78L12 с выходным напряжением Uвых=12 В; MC79L12 с выходным напряжением Uвых=-12 В. Входные конденсаторы C2, C5, C6 имеют емкость 0.33 мкФ и предназначены для сглаживания входного напряжения, поступающего на стабилизатор. Выходные конденсаторы C7, C9, C10 емкостью 0.1 мкФ не являются необходимыми, но существенно улучшают характер переходного процесса при включении электропитания. Остальные конденсаторы – сглаживающие: C1, C3, C4 – К50-35 1000 мкФ; C8, C11, C12 – К50-35 100 мкФ.
6 Программная часть
Блок-схема программы вывода информации на индикацию представлена на рис. 21.
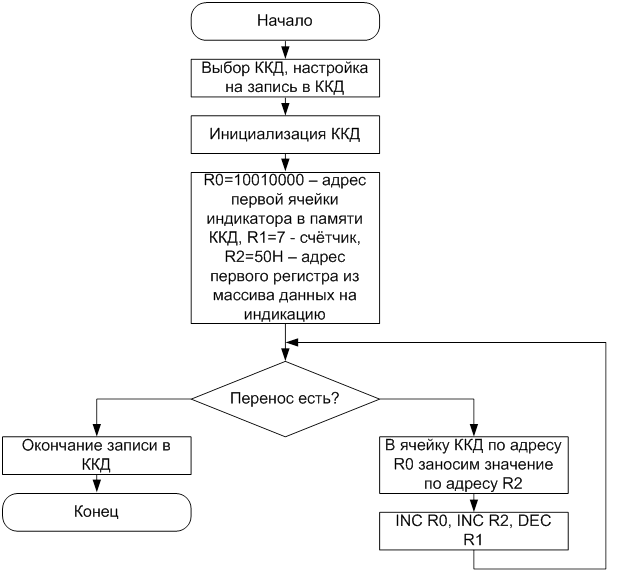
Блок-схема программы
HG:
CLR P0.4;выбор кристалла
SETB P0.3;направление передачи МК à ККД
CLR P0.7;
SETB P0.6;запись в ККД
MOV P2,00000000B;инициализация клавиатуры и индикаторов
MOV P2,00111111B;инициализация опорной частоты
CLR P0.3;начало записи данных в память дисплея
MOV R0,10010000B;начальный адрес памяти дисплея в ККД
MOV R1,07H;счётчик
MOV R2,50H;начальный адрес массива данных на индикацию в МК
M:
MOV P2,R0;выбор ячейки в памяти ККД
MOV P2,@R2;запись в неё очередного значения из массива
INC R0
INC R2
DEC R1
JNC M;переход если нет переноса
SETB P0.7;
CLR P0.6;данные записаны
RET
Похожие работы

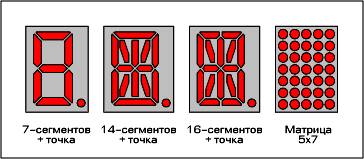
... и n-1 сегментами. Такой подход задан в светодиодном драйвере Maxim MAX6951 для управления 8-ю цифрами на всего 9-ти ножках. РАЗДЕЛ 2 РАЗРАБОТКА СВЕТОДИОДНОЙ МАТРИЦЫ 2.1 Постановка задачи Требуется разработать светодиодную матрицу, которая будет использоваться в праздничные и торжественные дни, на дискотеках, создавая различные световые эффекты. Разработка устройства будет производиться с ...
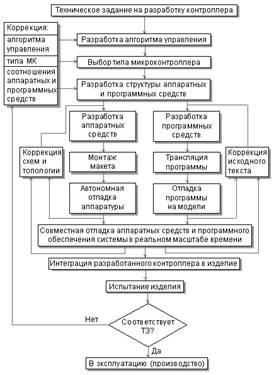
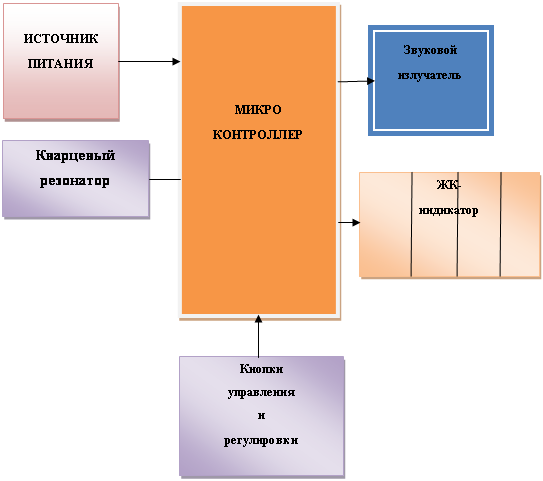


... создания устройств на микроконтроллера: этапы выполнения работ, разработка программного обеспечения, внедрения в производство. В проекте осуществлена практическая разработка многофункциональных астрономических часов, которые показываю различное время (марсианское, юлианское, лунное и др.), произведен выбор микроконтроллера для осуществления всех поставленных задач, разработаны структурная и ...
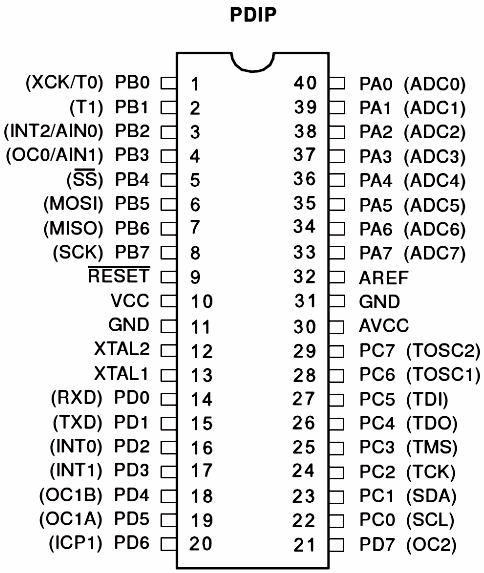
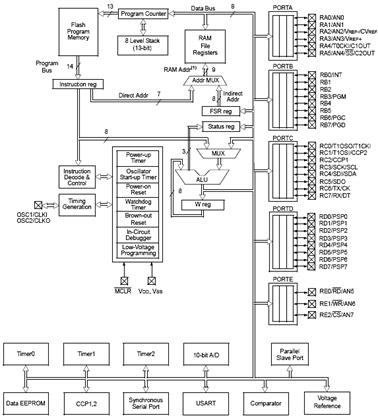
... 4,5 - 5,5 В (ATmega16) * Рабочая частота 0 - 8 МГц (ATmega16L) 0 - 16 МГц (ATmega16) Рисунок 1.4 – Функциональная схема микроконтроллера ATMega 16L РАЗДЕЛ 2 РАЗРАБОТКА УСТРОЙСТВА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СВЕТА Несмотря на бурное развитие сверхъярких светодиодов, в широкой продаже пока не появились светодиодные лампы, способные заменить бытовые лампы накаливания. Получившие ...
... источника меньше допустимого значения) и блок управления включает индикатор “Смените источник питания”. При восстановлении напряжения сети системы резервного электропитания опять переходит в режим нормальной работы. 2. Конструкторско-технологический раздел 2.1 Разработка печатной платы Печатные платы представляют собой диэлектрическую пластину с нанесенным на нее токопроводящим рисунком ( ...
0 комментариев