Навигация
Проектирование и исследование механизмов двухцилиндрового ДВС
32821
знак
5
таблиц
1
изображение
Кафедра «Теории механизмов и машин»
РАСЧЕТНО-ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
К КУРСОВОЙ РАБОТЕ НА ТЕМУ:
«Проектирование и исследование механизмов
2-х цилиндрового ДВС»
2010 г.
Содержание
рычажный механизм кинематический силовой
Техническое задание
Введение
1. Определение закона движения механизма при установившемся режиме работы
1.1 Структурный анализ
1.2 Построение кинематической схемы и планов возможных скоростей
1.3 Приведение сил и масс. Определение размеров маховика
1.4 Определение скорости и ускорения начального звена
2. Кинематический и силовой анализ рычажного механизма для заданного положения
2.1 Определение скоростей методом построения планов скоростей
2.2 Определение ускорений методом построения планов ускорений
2.3 Определение векторов сил инерции и главных моментов сил инерции звеньев
2.4 Силовой расчет диады 2-3
2.5 Силовой расчет диады 4-5
2.6 Силовой расчет механизма 1ого класса
2.7 Определение уравновешивающей силы с помощью теоремы Н.Е. Жуковского о «жестком рычаге»
Список использованной литературы
Техническое задание
Вариант 00.
1. Определить закон движения рычажного механизма при установившемся режиме работы.
2. Выполнить кинематический и силовой анализ рычажного механизма для заданного положения.
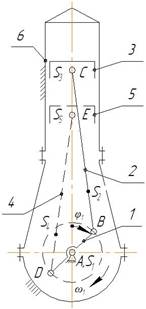
Рис. 1
Исходные данные:
Длина звена 1: lAB=lAD=l1=0,1 м; длина звеньев 2 и 4: l2=l4=0,38 м; относительное положение центра массы S шатуна: BS2/BC=DS4/DE=0,38; угловая средняя скорость звена 1: ω1ср=75 рад/с; масса звеньев 2 и 4: m2=m4=15 кг; масса звеньев 3 и 5: m3=m5=12 кг; момент инерции звеньев 2 и 4 относительно центра масс:
JS2=JS4=0,22 кг∙м2; момент инерции кривошипного вала относительно оси вращения: JA1=1,25 кг∙м2; момент инерции вращающихся звеньев редукторов, приведенный к оси кривошипного вала: JР=1,9 кг∙м2; момент инерции гребного вала с винтом:
Jв=4 кг∙м2; диаметр цилиндра: D=0,12 м; допускаемый коэффициент неравномерности вращения кривошипного вала: δ=1/40; координата звена 1 для силового анализа: φ1=30°.
Введение
Данная курсовая работа выполнена по предмету: «Теория механизмов и машин» и состоит из двух разделов. В первом разделе определяется закон движения рычажного механизма при установившемся режиме работы; во втором разделе проводится кинематический и силовой анализы рычажного механизма для заданного положения.
В этой работе рассматривается кривошипно-ползунный механизм, который является основным механизмом в двигателях внутреннего сгорания.
Курсовая работа состоит из пояснительной записки и двух чертежей формата А1 и А2. В пояснительной записке приводится описание заданного рычажного механизма, структурный, кинематический и силовой анализы. На чертежах построена кинематическая схема механизма для двенадцати равноотстающих положений кривошипа, планы скоростей и ускорений для заданного положения механизма, планы сил для заданного положения механизма и схема рычага Жуковского.
1. Определение закона движения механизма при установившемся режиме работы
1.1 Структурный анализ
Механизм представляет собой 6-тизвенный рычажный механизм.
Кинематическая схема механизма показана на рис. 1:
звено 1 – ведущее – кривошип BD равномерно вращается вокруг неподвижной оси;
звено 2 – шатун ВC совершает плоскопараллельное движение;
звено 3 – ползун (поршень) C движется поступательно;
звено 4 – шатун DE совершает плоскопараллельное движение;
звено 5 – ползун (поршень) E движется поступательно;
звено 6 – стойка неподвижная (неподвижный шарнир A; неподвижные направляющие ползуна E; неподвижные направляющие ползуна С).
Кинематические пары – подвижные соединения двух звеньев, сведены в таблицу 1.1.
Таблица 1.1.
| № п/п | Соединяемые звенья | Вид пары | Подвижность | Класс | |
| 1 | 1-6 | вращательная В | 1 | V | крайняя (внешняя) |
| 2 | 1-2 | вращательная В | 1 | V | средняя (внутренняя) |
| 3 | 1-4 | вращательная В | 1 | V | средняя (внутренняя) |
| 4 | 2-3 | вращательная В | 1 | V | средняя (внутренняя) |
| 5 | 3-6 | поступательная П | 1 | V | крайняя (внешняя) |
| 6 | 4-5 | вращательная В | 1 | V | средняя (внутренняя) |
| 7 | 5-6 | поступательная П | 1 | V | крайняя (внешняя) |
Кинематических пар IV класса в данном механизме нет.
В результате:
- число кинематических пар V класса р5 = 7;
- число кинематических пар IV класса р4 = 0.
Степень подвижности механизма W определяется по формуле Чебышева:
W = 3n – 2p5 – p4,
где n – число подвижных звеньев,
p5 – число кинематических пар V класса,
p4 – число кинематических пар IV класса.
Получаем:
W = 3·5 – 2·7 – 0 = 1,
т.е. механизм имеет одно ведущее звено – кривошип BD.
Рычажный механизм состоит из механизма 1-го класса и двухповодковых групп.
1. Диада 4-5 (рис. 1) – шатун DE с ползуном E – представляет собой двухповодковую группу второго вида, т.е. диаду с двумя вращательными и одной поступательной (конечной) парами.
Число подвижных звеньев n = 2.
Число кинематических пар с учетом незадействованной, но учитываемой при определении степени подвижности диады: р5 = 3; р4 = 0.
Степень подвижности диады:
W45 = 3·2 - 2·3 – 0 = 0
2. Диада 2-3 (рис. 1) – шатун BC с ползуном C представляет собой двухповодковую группу второго вида, т.е. диаду с двумя вращательными и одной поступательной (конечной) парами.
Число подвижных звеньев n = 2.
Число кинематических пар с учетом незадействованной, но учитываемой при определении степени подвижности диады: р5 = 3; р4 = 0.
Степень подвижности диады 2-3:
W23 = 3·2 - 2·3 – 0 = 0
Похожие работы
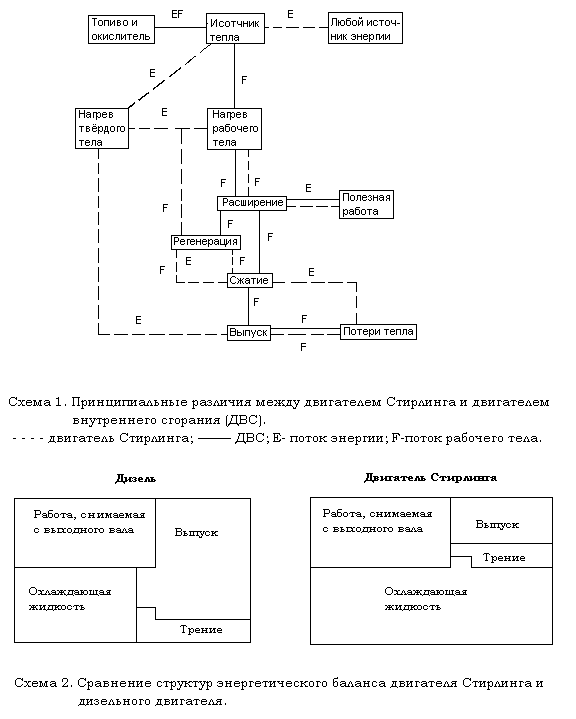
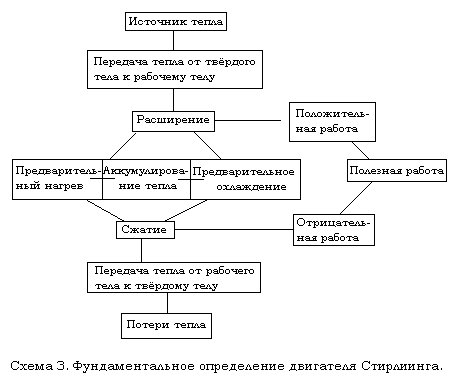
... во всех областях в большей степени ориентировалось на создание промышленных образцов двигателей, поскольку почти все программы ориентированы на определенную область применения двигателя Стирлинга. 6. Области применения Двигатель Стирлинга можно использовать во всех областях, где требуется преобразование тепловой энергии в механическую. В самом деле, почти нельзя назвать ни одной ...

... в минуту, эффективность (к.п.д.) 26.2 %. при весе пять тонн. Это намного превосходило существующие двигатели Отто с к.п.д. 20 % и судовые паровые турбины с к.п.д. 12 %, что вызвало немедленный интерес промышленности. Существенным недостатком первых дизелей являлась невозможность реверсирования (изменения направления вращения), затруднявшая их использование на водном транспорте. Первый судовой ...
... (особенно из-за большого утяжеления автомобиля), вместо них начали разрабатывать двигатели, работающие на газе. Однако, паровые двигатели очень успешно использовались в локомотивах. Настоящий рывок в развитии транспортных средств произошел с появлением двигателей внутреннего сгорания. В 1899 году французский инженер Филипп Лебон открыл светильный газ. В 1801 году Лебон взял патент на ...

... мельницы. Дата изобретения и автор мельничного регулятора неизвестены. В 1787 г. Уатт адаптировал существующий центробежный регулятор под паровую машину, создав более совершенную конструкцию, названную для отличия от прототипа - регулятором Уатта. Особое место в истории техники регулятор Уатта занял благодаря тому, что именно его конструкция легла в основу теории и практики регуляторостроения, ...
0 комментариев