Навигация
2.1 Резонансный метод
Резонансный метод, основанный на смещении амплитудно-частотной характеристики ультразвукового сигнала, прошедшего через образец наиболее распространен в экспериментальных исследованиях [1]. Заключается он в следующем. В образце возбуждают непрерывные ультразвуковые колебания, частоту которых плавно меняют в некотором диапазоне и измеряют зависимость амплитуды прошедшего сигнала от его частоты. При выполнении условия резонанса в исследуемой акустической системе, когда на длине образца укладывается целое число полуволн, амплитуда прошедшего сигнала достигает максимума, что соответствует резонансному пику на амплитудно-частотной характеристике. После термической обработки образца, изменяющей структуру и свойства, наблюдают смещение частот его резонансных пиков и судят об изменении скорости распространения ультразвуковых волн в металле.
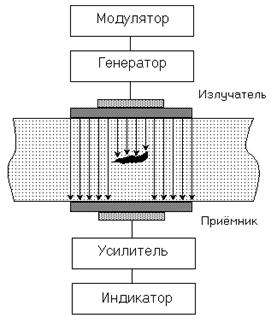
На рис. 8 представлена блок-схема экспериментальной установки, реализующей резонансный метод. Непрерывные ультразвуковые колебания в образце возбуждаются пьезопреобразователем (ПЭП) из титаната бария с резонансной частотой 2,5 МГц, питаемым от генератора колебаний. Прошедший через образец акустический сигнал принимается другим аналогичным ПЭП, преобразующим акустические колебания в переменное напряжение той же частоты, измеряемое ламповым милливольтметром. Частота колебаний регистрируется электронно-счетным частотомером.
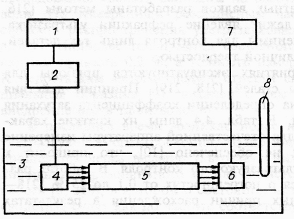
Рис. 8 Блок-схема ультра звуковой резонансной установки: 1 – частотомер Ч3–3З; 2 – генератор колебаний ГЗ (Г4 68); 3 – вода; 4 и б – излучающий и приемный пьезопреобразователи; 5 – цилиндрический образец; 7 – милливольт метр ВЗ-38; 8 – термометр
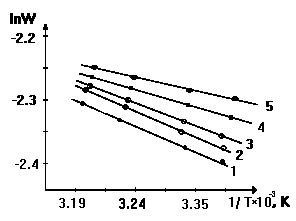
Для исключения влияния акустического контакта на результаты измерений образец вместе с преобразователями помещается в иммерсионную ванну, заполненную водой. Температура воды и соответственно образца измеряется термометром с точностью 0,1 К. Для акустических исследований резонансным методом наиболее удобны образцы в форме цилиндра диаметром 20–21 и длиной 80–90 мм с шероховатостью поверхности Rmax = 3,2 – 12,5 мкм. Их геометрические размеры можно контролировать с ошибкой 5 мкм микрометром и измерительным микроскопом. Для установления корреляций между резонансными ликами исследуемого образца после различных термообработок амплитудно-частотные зависимости необходимо снимать в диапазоне частот от 2,2 до 2,9 МГц, охватывающем не менее десяти резонансных ликов. Положение экстремальных точек этой зависимости определяется с ошибкой 0,1 кГц. На рис. 9. приведен участок амплитудно-частотной характеристики одного из образцов.
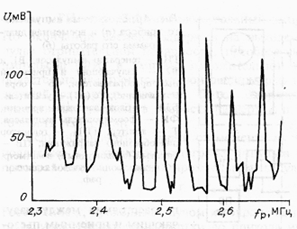
Рис. 9. Участок амплитудно-частотной характеристики одного из образцов
2.2 Импульсный метод
Выше описанный метод применим на практике лишь для контроля деталей, имеющих форму цилиндра с малым разбросом размеров. Кроме того, для резонансного метода сложна обработка результатов измерений. Устранить погрешность, связанную с размерным фактором, и упростить интерпретацию получаемых данных можно с помощью фиксации расстояния, проходимого ультразвуковой волной. А это возможно с применением поверхностных акустических волн, например рэлеевских. Очевидно, наиболее просто метод контроля с помощью этих волн можно реализовать импульсным методом возбуждения ультразвуковых колебаний. Использование импульсного сигнала позволяет применить жесткое, без демпфирующих прокладок, соединение пьезопреобразователей друг с другом и повысить тем самым точность измерений скорости звука по времени прохождения импульсом фиксированного расстояния между излучающим и приемным пьезопреобразователями. Рассмотрим работу импульсного прибора с осциллоскопической индикацией [1], его блок-схему и временные диаграммы. Принцип действия устройства заключается в следующем. Генератор импульсов (ГИ) формирует короткие импульсы амплитудой 35… 100 В, которые подаются на излучающий пьезопреобразователь В1. Ультразвуковой импульс проходит по образцу и через промежуток времени t достигает приемного пьезопреобразователя В2, где преобразуется в электрический импульс, который усиливается усилителем Ус и подается на вертикальный вход (Вх «У’) электронно-лучевого осциллографа ЭО. При постоянной скорости развертки положение импульса на экране зависит от времени прохождения ультразвуком расстояния между пьезопреобразователями и, следовательно, от скорости распространения ультразвука в образце. Запуск ждущей развертки осциллографа происходит не в момент формирования в блоке ГИ импульса, а по истечении промежутка времени t0 несколько меньшего времени t пробега ультразвуковым импульсом расстояния между пьезопреобразователями (рис. 10).
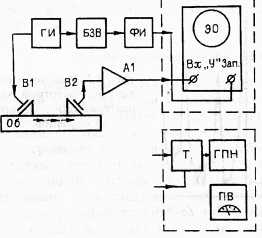
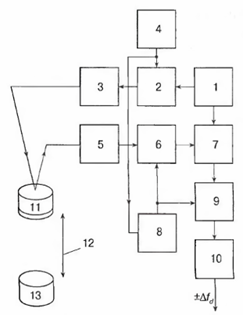
Рис. 10. Блок-схема импульсного прибора (а): ГИ – генератор импульсов; В1 и В2 – излучающий и приемный пьезопреобразователи; Об – образец (изделие); Ус (А1) – усилитель; БЭВ – блок задержки времени; ФИ – формирователь импульсов; Т – Трйггер; ГПН – генератор пилообразного напряжения; ПВ – пиковый (амплитудный) вольтметр, ЭО – электронно-лучевой осциллограф
Временная задержка сигнала осуществляется специальным блоком задержки времени (БЭВ), который запускается импульсом, поступающим с ГИ, и формирует прямоугольный импульс длительности t0. По окончании времени задержки на выходе БЗВ появляется импульс отрицательной полярности, преобразуемый формирователем импульсов (ФИ) в импульс положительной полярности, который подается на электронно-лучевой осциллограф и запускает генератор ждущей развертки. Введение блока задержки времени позволяет существенно увеличить скорость развертки и тем самым повысить точность измерений.
Если обозначить t’ время от момента включения развертки до появления на экране осциллографа импульса от приемного пьезопреобразователя, то время прохождения импульса по образцу
![]()
Расстояние х, проходимое лучом на экране осциллографа от момента запуска генератора развертки до прихода импульса с приемного пьезопреобразователя, будет
![]()
где V – скорость развертки. Но
![]()
где l – расстояние между излучающим и приемным пьезопреобразователями; Vr – скорость распространения ультразвука в образце.
Подставив (4.13) в уравнение (4.12), получим
![]()
Очевидно, точность измерения будет тем выше, чем больше х, но это значение не может превышать размеров экрана трубки осциллографа. При заданных размерах экрана большую точность можно получить, увеличивая скорость развертки V при уменьшении времени t’. Применение осциллографа С1–54 дает точность измерений до 0,2%.
Похожие работы
... металла образующихся в растворе кавитационных полостей. В научной литературе мало внимания уделялось экспериментальным разработкам по выяснению воздействия ультразвука на коррозионно-механическое разрушение сталей. В настоящей работе проводится анализ влияния механической нагрузки и акустической эмиссии на скорость коррозионно-механического разрушения стали в водном растворе серной кислоты. ...
... риск практически сводится к нулю. Так что все опасения относительно вредного влияния ультразвука не имеют под собой почву. И, тем не менее, врачи, основываясь на многолетнем опыте использования ультразвука, установили некоторые противопоказания для ультразвуковой терапии. Это – острые интоксикации, болезни крови, ишемическая болезнь сердца со стенокардией, тромбофлебит, склонность к кровотечениям ...

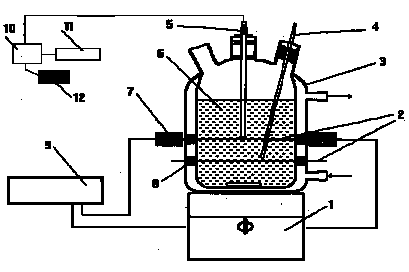
... в корпусе датчика (9). С задней стороны корпуса прикручивается крышка (10) с разъемом (11) SKINTOP MS, через который проходит сигнальный кабель (12) для соединения датчика с прибором для измерения скорости кровотока. Для уменьшения потери энергии ультразвукового колебания при излучении в исследуемую среду используется промежуточная среда, заполненная акустически прозрачной жидкостью (13), в ...
... звукопоглощающим веществом термопар или термисторов[4]. Интенсивность и звуковое давление можно оценивать и оптическими методами, например по дифракции света на УЗ. рименение ультразвука. Многообразные применения УЗ, при которых используются различные его особенности, можно условно разбить на три направления. Первое связано с получением информации посредством УЗ-вых волн, второе – с ...
0 комментариев