Навигация
Принцип построения РЛС управления воздушным движением
51777
знаков
2
таблицы
7
изображений
СОДЕРЖАНИЕ
Введение
1. Теоретическая часть
1.1. Общая характеристика РЛС УВД
1.2. Задачи и основные параметры РЛС
1.3. Особенности первичных РЛС
1.4. Трассовая обзорная РЛС «Скала - М»
1.5. Особенности функциональных узлов РЛС «Скала - М»
1.6. Патентный поиск
2. Безопасность и экологичность проекта
2.1. Безопасная организация рабочего места инженера ПЭВМ
2.2. Потенциально опасные и вредоносные производственные факторы при работе с ПЭВМ
2.3. Обеспечение электробезопасности при работе с ПЭВМ
2.4 Электростатические заряды и их опасность
2.5. Обеспечение электромагнитной безопасности
2.6. Требования к помещениям для эксплуатации ПЭВМ
2.7. Микроклиматические условия
2.8. Требования к шуму и вибрации
2.9. . Требования к организации и оборудованию рабочих мест с мониторами и ПЭВМ
2.10. Расчет освещенности
2.11. Экологичность проекта
Заключение
Библиографический список
ВВЕДЕНИЕ
Радиолокационные станции системы управления воздушным движением (УВД) являются основным средством сбора информации о воздушной обстановке для диспетчерского состава службы движения и средством контроля за ходом выполнения плана полетов, а также служат для выдачи дополнительной информации по наблюдаемым воздушным судам и обстановке на взлетно-посадочной полосе и рулежных дорожках. В отдельную группу могут быть выделены метеорологические РЛС, предназначенные для оперативного снабжения командного, летного и диспетчерского состава данными о метеорологической обстановке.
В нормах и рекомендациях ИКАО, Постоянной комиссии по радиотехнической и электронной промышленности СЭВ предусмотрено разделение радиолокационных средств на первичные и вторичные. Часто первичные радиолокационные станции (ПРЛС) и ВРЛС объединяют по принципу функционального использования и определяют как радиолокационный комплекс (РЛК). Однако характер получаемой информации, особенно построения аппаратуры, позволяет рассматривать данные станции отдельно.
Исходя из сказанного РЛС целесообразно объединить в следующие трастовые обзорные радиолокаторы ОРЛ-Т с максимальной дальностью действия около 400 км;
трассовые и аэроузловые радиолокаторы ОРЛ-ТА с максимальной дальностью действия порядка 250 км;
аэродромные обзорные радиолокаторы ОРЛ-А (варианты В1, В2, ВЗ) с максимальной дальностью действия 150, 80 и 46 км соответственно;
посадочные радиолокаторы (ПРЛ);
вторичные радиолокаторы (ВРЛ);
комбинированные обзорно-посадочные радиолокаторы (ОПРЛ);
радиолокаторы обзора летного поля (ОЛП);
метеорологические радиолокаторы (МРЛ).
В данной курсовой работе рассматривается принцип построения РЛС управления воздушным движением.
1. Теоретическая часть
1.1. Общая характеристика РЛС УВД
радиолокационный управление воздушный движение
В современных авторизированных системах (АС) управления воздушного движения (УВД) применяются РЛС третьего поколения. Переоснащение предприятий гражданской авиации занимает обычно длительный период, поэтому в настоящее время наряду с современными РЛС применяются РЛС второго и даже первого поколений. РЛС различных поколений отличаются, прежде всего, элементной базой, способами обработки радиолокационных сигналов и защиты РЛС от помех.
РЛС первого поколения начали широко применятся с середины 60-х годов. К ним относятся трассовые РЛС типа П-35 и аэродромные РЛС типа “Экран”. Эти радиолокаторы построены на электровакуумных приборах с применением навесных элементов и объемного монтажа.
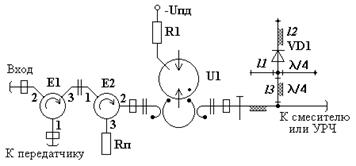
РЛС второго поколения начали применяться в конце 60-х - начале 70-х годов. Повышение требований к источникам радиолокационной информации системы УВД привело к тому, что радиолокаторы этого поколения превратились в сложные многорежимные и многоканальные радиолокационные комплексы (РЛК). Радиолокационный комплекс второго поколения состоит из РЛС со встроенным радиолокационным каналом и аппаратуры первичной обработки информации (АПОИ). Ко второму поколению относятся трастовые РЛК «Скала» и аэродромные РЛК «Иртыш». В этих комплексах наряду с электровакуумными приборами начали широко применяться твердотельные элементы, модули и микромодули в сочетании с монтажом на основе печатных плит. Основной схемой построения первичного канала РЛК стала двухканальная схема с разносом частот, которая позволила повысить показатели надежности и улучшить характеристики обнаружения по сравнению с РЛС первого поколения. В РЛС второго поколения начали применяться более совершенные средства защиты от помех.
Опыт эксплуатации РЛС и РЛК второго поколения показал, что в целом они недостаточно полно удовлетворяют требованиям АС УВД. В частности, к их существенным недостаткам относятся ограниченное применение в аппаратуре современных средств цифровое обработки сигналов, малый динамический диапазон приемного тракта и др. Данные РЛС и РЛК используются в настоящее время в неавтоматизированных и автоматизированных системах УВД.
Первичные РЛС и РЛК третьего поколения начали использоваться в гражданской авиации нашей страны как основные источники радиолокационной информации АС УВД с 1979 г. Главное требование, которое определяет особенности РЛС и РЛК третьего поколения, - обеспечение стабильного уровня ложных тревог на выходе РЛС. Это требование выполняется благодаря адаптивным свойствам первичных РЛС третьего поколения. В адаптивных РЛС осуществляются анализ в реальном масштабе времени помеховой обстановки и автоматическое управление режимом работы РЛС. С этой целью вся зона обзора РЛС разбивается на ячейки, для каждой из которых в результате анализа за один или несколько периодов обзора принимается отдельное решение о текущем уровне помех. Адаптация РЛС к изменениям помеховой обстановки обеспечивает стабилизацию уровня ложных тревог и уменьшает опасность перегрузки АПОИ и аппаратуры передачи данных в центр УВД.
Элементной базой РЛС и РЛК третьего поколения являются интегральные микросхемы. В современных РЛС начинают широко применятся элементы вычислительной техники и, в частности, микропроцессоры, которые служат основой технической реализации адаптивных систем обработки радиолокационных сигналов.
Похожие работы

... . Ко второму типу относятся РЛС управления объектами по данным радиолокационных измерений, такие как РЛС управления воздушным движением. 2). Анализ задачи и ее формализация Основываясь на требованиях технического задания нам необходимо создать средства постановки помех и помехозащиты для радиолокационной станции управления воздушным движением работающей по трем координатам: дальности, ...
2;fд + Пнс. Найдем эти составляющие. Для приемников импульсных радиосигналов приемника обнаружения: Пс = (1...2) /, где t - длительность принимаемого импульса. Для приемника обзорной РЛС требуется обеспечить обнаружение зондирующих импульсов, тогда в этом случае ширина спектра: где и - длительность принимаемых импульсов. Общая нестабильность частоты и неточность настроек ...
... обзора земли с целью обеспечения возможности автономной навигации по характерным наземным радиолокационным ориентирам. 3. Обоснование, выбор и расчет тактико-технических характеристик радиолокационной станции 3.1. Обоснование, выбор и расчет тактических характеристик РЛС 3.1.1. Максимальная дальность действия RmaxМаксимальная дальность действия задается тактическими требованиями и зависит ...


... " можно возложить непрерывное круглосуточное наблюдение за поверхностью Земли в широком диапазоне частот. Используя их, можно создать информационное поле страны, охватывающее контроль и управление движением воздушного и водного транспорта, поскольку эти машины в состоянии взять на себя функции наземных, воздушных и спутниковых локаторов (совместная информация от них дает полную картину того, что ...
0 комментариев