Навигация
Задачи и основные параметры РЛС
51777
знаков
2
таблицы
7
изображений
1.2. Задачи и основные параметры РЛС
Назначение РЛС - обнаружение и определение координат воздушных судов (ВС) в зоне ответственности радиолокатора. Первичные радиолокационные станции позволяют обнаружить и измерить наклонную дальность и азимут ВС методом активной радиолокации, используя отраженные от целей зондирующие сигналы радиолокатора. Они работают в импульсном режиме с высокой (100 ... 1000) скважностью. Круговой обзор контролируемого воздушного пространства осуществляется с помощью вращающейся антенны, обладающей остронаправленной ДНА в горизонтальной плоскости.
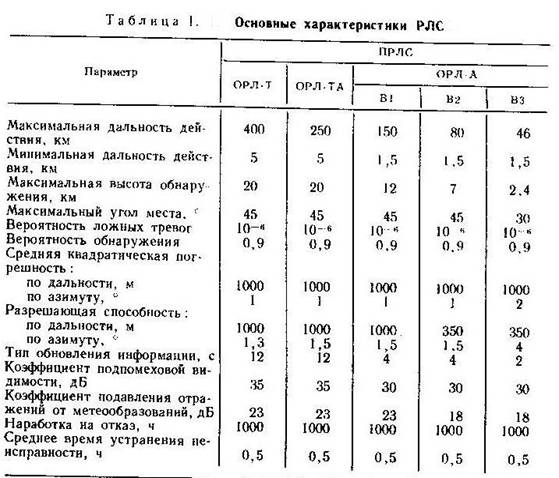
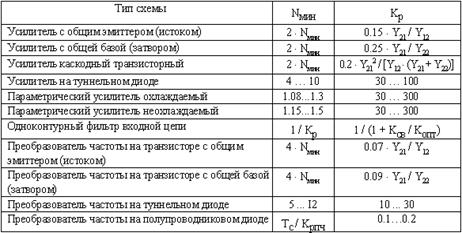
В табл. 1 приведены основные характеристики обзорных РЛС и их численные значения, регламентированные нормами СЭВ—ИКАО.
Рассматриваемые РЛС имеют значительное число общих черт и зачастую выполняют аналогичные операции. Им присуща идентичность структурных схем. Основные их отличия обусловлены различными особенностями функционального использования в иерархически сложной системе УВД.
1.3. Особенности первичных РЛС
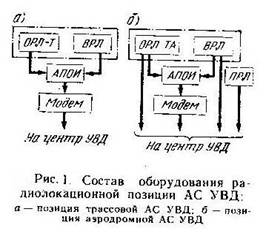
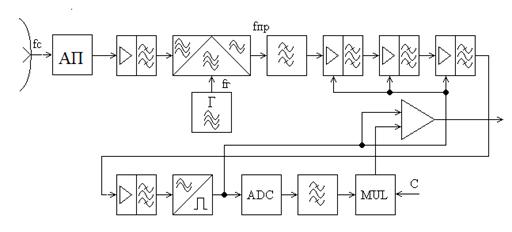
Типовая структурная схема первичной РЛС (рис. 1) состоит из следующих основных узлов: антенно-фидерной системы (АФС) с механизмом привода (МПА); датчика угловых положений (ДУА) и канала подавления боковых лепестков (КП); передатчика (Прд) с устройством автоматической подстройки частоты (АПЧ); приемника (Прм); аппаратуры выделения и обработки сигналов (АВОС) - в ряде современных и перспективных радиолокационных станций и комплексов, объединяемых с приемником в процессор обработки сигналов; синхронизирующего устройства (СУ), тракта трансляции сигналов к внешним устройствам обработки и отображения (ТС); контрольного индицирующего устройства (КМ), обычно работающего в режиме «Аналог» или «Синтетика»; системы встроенного контроля (ВСК).
Основная антенна, входящая в состав АФС, предназначена для формирования ДНА, имеющей в вертикальной плоскости ширину 30 ... 40º, а в горизонтальной плоскости ширину 1 ...2°. Малая ширина ДНА в горизонтальной плоскости обеспечивает необходимый уровень разрешающей способности по азимуту. Для уменьшения влияния дальности обнаружения ВС на уровень отражения от цели сигналов ДНА в вертикальной плоскости часто имеет форму, подчиняющуюся закону Cosec2 θ, где θ - угол места.
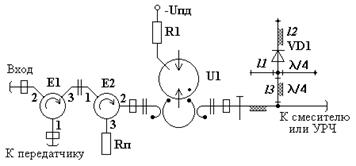
Канал подавления боковых лепестков ДН запросной антенны (при работе РЛС в активном режиме, т. е. при использовании встроенного или параллельно работающего ВРЛ) предназначен для уменьшений вероятностей ложных срабатываний самолетного ответчика. Конструктивно более проста система подавления боковых лепестков по ответу.
В большинстве РЛС в АФС используются два облучателя, один из которых обеспечивает обнаружение ВС на малых высотах, т. е. под малыми углами места. Особенностью ДН в вертикальной плоскости является градация ее конфигурации, особенно в нижней части, чем достигается уменьшение помех от местных предметов и подстилающей поверхности. С целью повышения гибкости юстирования РЛС предусмотрена возможность изменения максимума ДНА по углу 9 в пределах 0 ... 5º относительно горизонтальной плоскости. В состав АФС входят устройства, позволяющие изменять поляризационные характеристики излучаемых и принимаемых сигналов. Так, например, применение круговой поляризации позволяет ослабить на 15 ... 22 дБ сигналы, отраженные от метеообразований.
Отражатель антенны, выполненный из металлической сети, по форме близок к усеченному параболоиду вращения. В современных РЛС УВД используются также радиопрозрачные покрытия, защищающие АФС от осадков и ветровой нагрузки. На отражателе антенны монтируют антенны ВРЛ и антенну канала подавления.
Механизм привода антенны обеспечивает ее равномерное вращение. Частота вращения антенны определяется требованиями информационного обеспечения диспетчеров службы движения, ответственных за различные этапы полета. Как правило, предусмотрены варианты секторного и кругового обзора пространства.
Определение азимута ВС осуществляется с помощью считывания информации в системе координат, заданных для индицирующего устройства РЛС. Датчики угловых положений антенны предназначены для получения дискретных или аналоговых сигналов, являющихся базовыми для выбранной системы координат.
Передатчик предназначен для получения радиоимпульсов длительностью 1 ... 3 мкс. Частотный диапазон работы выбирается исходя из назначения РЛС. С целью снижения потерь, вызванных флуктуациями цели, увеличения числа импульсов, отраженных от цели за один обзор, а также с целью борьбы со слепыми скоростями применяют двухчастотное зондирование пространства. При этом рабочие частоты отличаются на 50...100 МГц.
Временные характеристики зондирующих импульсов зависят от функционального использования РЛС. В ОРЛ-Т используются зондирующие импульсы с длительностью порядка 3 икс, следующие с частотой повторений 300 ... 400 Гц, а ОРЛ-А имеют длительность импульса не более 1 мкс при частоте повторения 1 кГц. Мощность передатчика не превосходит 5МВт.
Для обеспечения заданной точности частоты генерируемых колебаний СВЧ, а также для нормальной работы схемы СДЦ используется устройство автоматической подстройки частоты (АПЧ). В качестве источника опорных колебаний в устройствах АПЧ используют стабильный местный гетеродин приемника. Скорость авто подстройки достигает единиц мегагерц на секунду, что позволяет снизить влияние АПЧ на эффективность работы системы СДЦ. Значение остаточной расстройки реальной величины частоты по отношению к номинальному значению не превосходит 0,1 ... 0,2 МГц.
Обработка сигналов по заданному алгоритму осуществляется в приемно-анализирующем устройстве РЛС в случае, когда Прм и АВОС практически неразличимы.
В общем случае приемник выполняет функции выделения, усиления и преобразования принимаемых эхо-сигналов. Особенностью приемников РЛС является наличие малошумящего усилителя высокой частоты, позволяющего снизить коэффициент шума приемника и тем самым увеличить дальность обнаружения цели. Среднее значение коэффициента шума приемников лежит в пределах 2 ... 4 дБ, а чувствительность составляет 140 дБ/Вт. Промежуточная частота обычно равна 30 МГц, двойное преобразование частоты в РЛС УВД практически не используется, коэффициент усиления УПЧ около 20 ... 25 дБ. В некоторых РЛС с целью расширения динамического диапазона входных сигналов используют усилители с ЛАХ.
В свою очередь для сужения диапазона входных сигналов, поступающих на АПОИ, используют АРУ, а также ВАРУ, повышающую коэффициент усиления УПЧ при работе на предельных дальностях обнаружения.
С выхода УПЧ сигналы идут по каналам амплитудного и фазового
детектирования.
Аппаратура временной обработки сигнала (АВОС) выполняет функцию фильтрации полезного сигнала на фоне помех. Наибольшей интенсивностью обладают непреднамеренные помехи от радиотехнических средств, расположенных в радиусе до 45 км от РЛС.
Аппаратурные средства борьбы с электромагнитными помехами включают специальные устройства коммутации и управления ДН, схемы ВАРУ, уменьшающие динамический диапазон входных сигналов от близкорасположенных целей, устройства бланкирования приемо-анализирующего тракта, фильтры синхронных и несинхронных помех и др.
Эффективным средством борьбы с помехами от неподвижных или слабо меняющих свое положение в пространстве и времени целей являются системы селекции движущихся целей (СДЦ), реализующие методы одно - или двукратной череспериодной компенсации. В ряде современных РЛС устройство селекции движущихся целей (СДЦ) реализует алгоритм цифровой обработки в квадратурных каналах, имея коэффициент подавления помех от неподвижных объектов 40 ... 43 дБ, а от метеопомех до 23 дБ.
Выходными устройствами АВОС являются параметрические и непараметрические обнаружители сигналов, позволяющие стабилизировать вероятность ложной тревоги на уровне 10-6.
При цифровой обработке сигналов АВОС представляет собой специализированный микропроцессор.
Похожие работы

... . Ко второму типу относятся РЛС управления объектами по данным радиолокационных измерений, такие как РЛС управления воздушным движением. 2). Анализ задачи и ее формализация Основываясь на требованиях технического задания нам необходимо создать средства постановки помех и помехозащиты для радиолокационной станции управления воздушным движением работающей по трем координатам: дальности, ...
2;fд + Пнс. Найдем эти составляющие. Для приемников импульсных радиосигналов приемника обнаружения: Пс = (1...2) /, где t - длительность принимаемого импульса. Для приемника обзорной РЛС требуется обеспечить обнаружение зондирующих импульсов, тогда в этом случае ширина спектра: где и - длительность принимаемых импульсов. Общая нестабильность частоты и неточность настроек ...
... обзора земли с целью обеспечения возможности автономной навигации по характерным наземным радиолокационным ориентирам. 3. Обоснование, выбор и расчет тактико-технических характеристик радиолокационной станции 3.1. Обоснование, выбор и расчет тактических характеристик РЛС 3.1.1. Максимальная дальность действия RmaxМаксимальная дальность действия задается тактическими требованиями и зависит ...


... " можно возложить непрерывное круглосуточное наблюдение за поверхностью Земли в широком диапазоне частот. Используя их, можно создать информационное поле страны, охватывающее контроль и управление движением воздушного и водного транспорта, поскольку эти машины в состоянии взять на себя функции наземных, воздушных и спутниковых локаторов (совместная информация от них дает полную картину того, что ...
0 комментариев