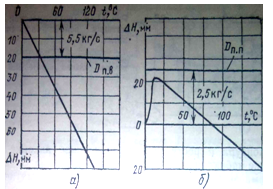
Описание объекта управления. Его статические и динамические характеристики
F3(α) – зависимость действующего значения выходного напряжения тиристорного регулятора от угла включения тиристоров;
Область устойчивости системы в области параметров ПИ регулятора
Исследовать процессы в системе (для выходного сигнала и ошибки) при действии на входе следующих сигналов
Исследование процессов для выходной переменной и ошибки системы при действии на входе сигналов задания, содержащих гармоническую составляющую
Навигация
Исследование процессов для выходной переменной и ошибки системы при действии на входе сигналов задания, содержащих гармоническую составляющую
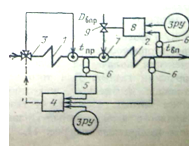
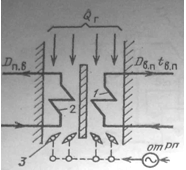
Автоматическая система регулирования температуры
25222
знака
0
таблиц
97
изображений
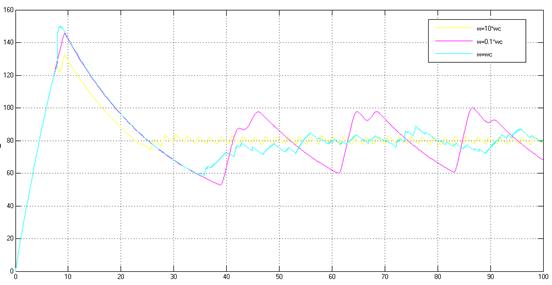
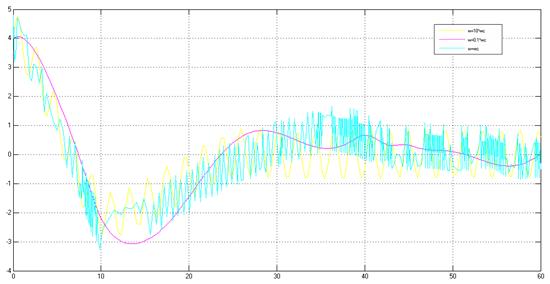
3.2 Исследование процессов для выходной переменной и ошибки системы при действии на входе сигналов задания, содержащих гармоническую составляющую
Для выходной переменной
Для ошибки
3.3 Статические характеристики нелинейной системы
Зависимости выходной переменной от сигнала задания при трех значениях возмущающего воздействия:
Qc=25ºСQc=5ºС
Qc=50ºС
Зависимости выходной переменной от возмущающего воздействия при трех значениях задающего воздействия:
Uз=2ВUз=4В

Uз=6В
В системе применяется астатический регулятор, поэтому статические характеристики без наклона. Возмущения не влияют на установившееся значение выходной величины, статическая ошибка равна нулю.
4. ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ ИМИТАЦИОННОГО МДЕЛИРОВАНИЯ АВТОМАТИЧЕСКОЙ СИСТЕМЫ
4.1 Составление программы для имитационного моделирования, используя структурную схему нелинейной автоматической системы
Листинг программы в Matlab:
clc;
clear;
%Параметыр моделирвоания
dt=0.001;
time=0:dt:100;
%Параметры системы управления
% Пи-регулятор
%------
Kp=20.39;
Tp=10;
%-----
U0=4; %Температура задания
%-----
Upm=10; %ограничение с Пи регулятора
%-----
K0=0.4;
Uc=220;% действующее напряжение сети
C=100;
Rn=25; % сопротивление нагревателя
Tc=25; %температура окружающей среды
gamma=5;
%Параметры датчика тока
%-----
Kd=0.05;
Td=2;
%-----
%Инициализация
err=zeros(1,numel(time));
d_err=zeros(1,numel(time));
U=zeros(1,numel(time));
Up=zeros(1,numel(time));
alpha=zeros(1,numel(time));
Un=zeros(1,numel(time));
Pn=zeros(1,numel(time));
err1=zeros(1,numel(time));
T=zeros(1,numel(time));
Ud=zeros(1,numel(time));
%Начальные условия
%--------------------------
err(1)=U0;
d_err(1)=0;
U(1)=Kp*err(1);
if (U(1)>=10)
Up(1)=10;
end;
alpha(1)=pi/(1+K0*Up(1));
Un(1)=(((pi-alpha(1)+(sin(2*alpha(1))/2))/pi)^0.5)*Uc;
Pn(1)=(Un(1))^2/Rn;
err1(1)=Pn(1)-((T(1)-Tc)*gamma);
T(1)=0; %начальная температура объекта
Ud(1)=0;
%-------------------------
for k=2:1:numel(time)
err(k)=U0-Ud(k-1);
d_err(k)=(err(k)-err(k-1))/dt;
U(k)=U(k-1)+((dt/Tp)*(Kp*Tp*d_err(k-1)+Kp*err(k-1)));
if (U(1)>10)
Up(1)=10;
else
Up(1)=U(1);
end;
if (U(k)<0)
Up(k)=0;
else
Up(k)=U(k);
end;
alpha(k)=pi/(1+K0*Up(k));
Un(k)=(((pi-alpha(k)+(sin(2*alpha(k))/2))/pi)^0.5)*Uc;
Pn(k)=(Un(k))^2/Rn;
err1(k)=Pn(k)-((T(k-1)-Tc)*gamma);
T(k)=T(k-1)+(dt*err1(k-1)/C);
Ud(k)= Ud(k-1)+((Kd*T(k-1)-Ud(k-1))*(dt/Td));
end;
plot(time,T);
grid on;
figure;
plot(time,err);
grid on;
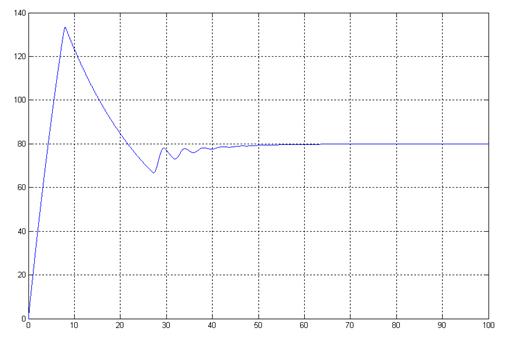
Результаты выполнения программы:
Переходный процесс относительно ошибки

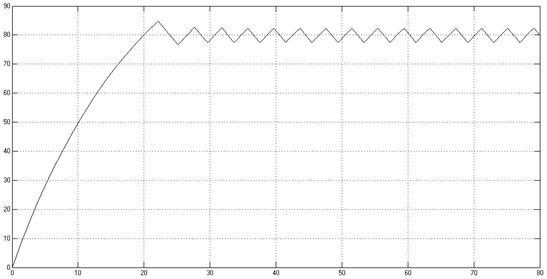
Переходный процесс относительно выходной переменной
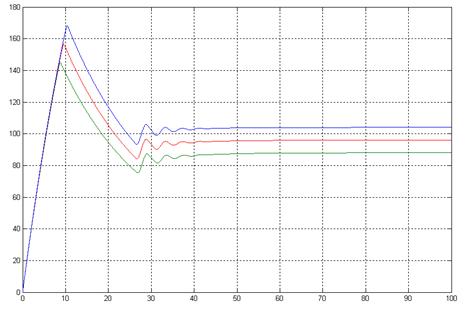
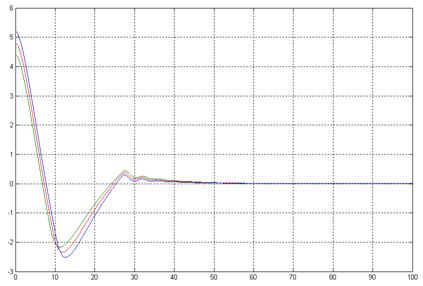
4.2 Используя составленную программу, определить переходные процессы в системе для выходной переменной и ошибки при изменении задающего и возмущающего воздействий для различных рабочих точек
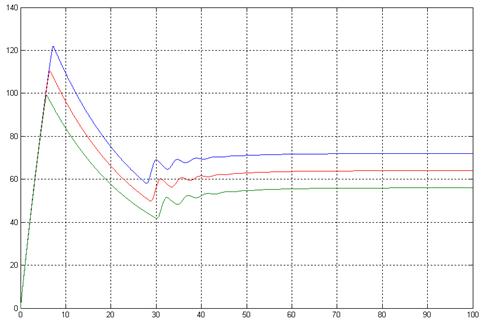
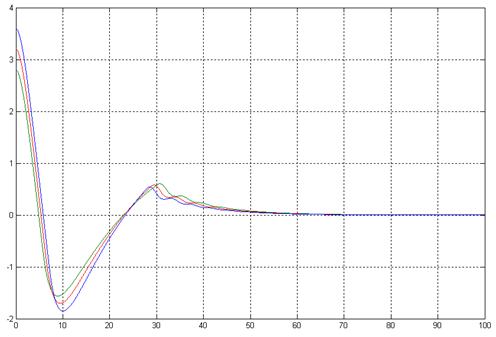
Uз=4В
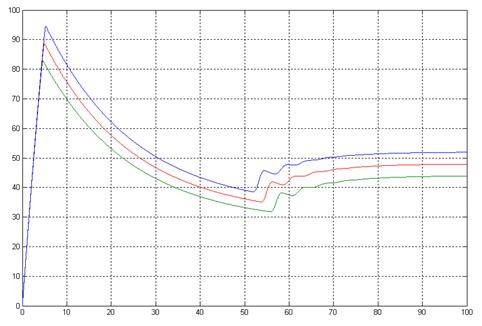
Переходные процессы для выходной переменной (+10%,+20%,+30%)
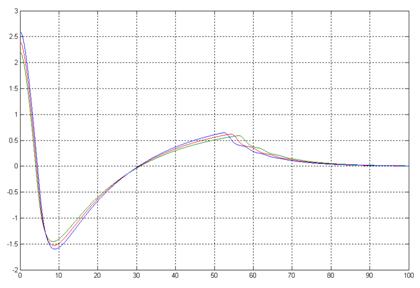
Переходные процессы для ошибки (+10%,+20%,+30%)
Переходные процессы для выходной переменной (-10%,-20%,-30%)
Переходные процессы для ошибки (-10%,-20%,-30%)
Uз=2В
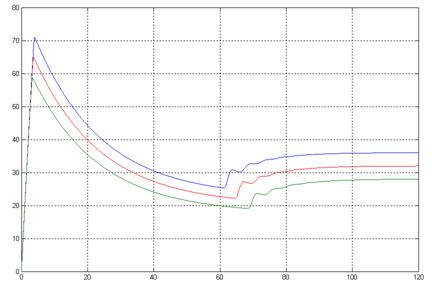
Переходные процессы для выходной переменной (+10%,+20%,+30%)
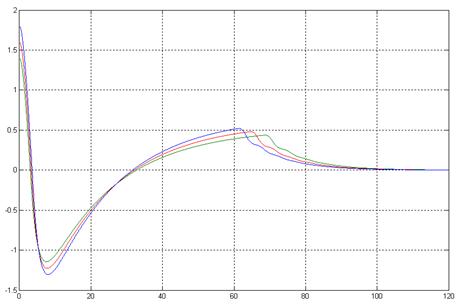
Переходные процессы для ошибки (+10%,+20%,+30%)
Переходные процессы для выходной переменной (-10%,-20%,-30%)
Переходные процессы для ошибки (-10%,-20%,-30%)
4.3 Статические характеристики системы
Зависимости выходной переменной от возмущающего воздействия при трех значениях задающего воздействия:
Uз=2В Uз=4В
Uз=6В
4.5 Сравнение результатов моделирования с помощью составленной программы и с помощью типовых программных средств
При сравнении переходных процессов по ошибке и возмущающему воздействию, а также статических характеристик системы, полученных с помощью написанной программы и имитационной среды Simulink, можно сделать вывод, очевидно, что графики практически полностью совпадают. Небольшие различия обусловлены лишь различным шагом расчетов.
5. ДОПОЛНИТЕЛЬНОЕ ИССЛЕДОВАНИЕ СИСТЕМЫ
5.1 Влияние напряжения питающей сети на процессы регулирования температуры
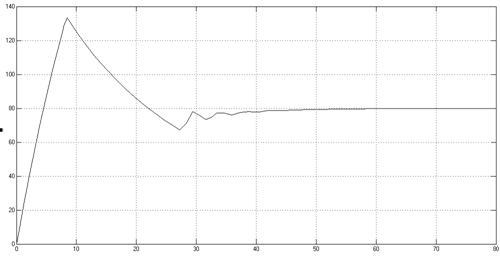
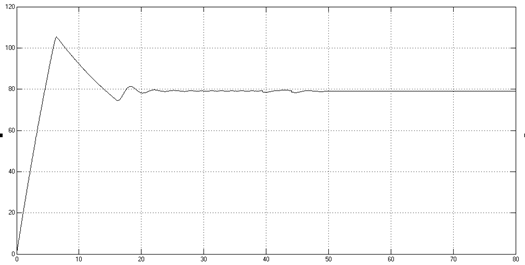
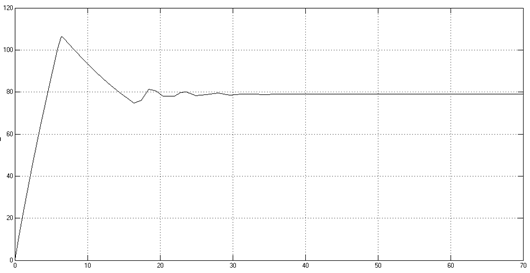
Рассмотрим переходные процессы при одном и том же напряжении задания 4В и температуре окружающей среды 25С:
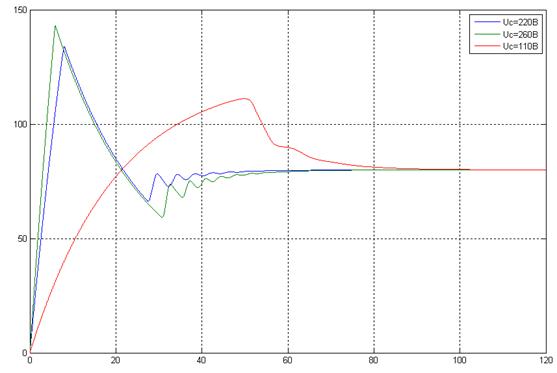
Как видно по переходному процессу, при увеличении напряжения питающей сети увеличивается перерегулирование, инерционность увеличивается незначительно. При уменьшении напряжения питания в 2 раза (например, отказ одного тиристора) перерегулирование резко снижается, но сильно увеличивается время регулирования.
5.2 Изменение свойств системы при использовании вместо ПИ регулятора П-, ПД- и ПИД-регулятора
ПИ-регуляор(исходный):
ПД-регулятор (Kp=20.39, Kd=2):
Применение ПД-регулятора позволило уменьшить величину перерегулирования и значительно сократить время регулирования, однако появилась установившаяся ошибка, для данного задания равная 1ºС.
П-регулятор (Кр=20.39):
Применение данного регулятора немного увеличило перерегулирование, однако время регулирования уменьшилось, даже по сравнению с ПД-регулятором.
ПИД-регулятор (Kp=20.39, Kи=10; Kd=2):
ПИД-регулятор немного уменьшил перерегулирование, при этом время регулирования осталось прежним и появился большой разброс регулируемой величины в установившемся режиме.
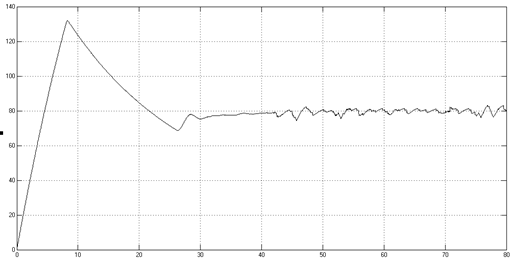
5.3 Работа системы при использовании релейного двухпозиционного регулятора
Двухпозиционное реле с гистерезисом (ширина гистерезиса -0.01,0.01, высокий уровень С=1.5, низкий уровень = 0) :
Применение данного регулятора допустимо в том случае, если допустимо отклонение регулируемой величины в довольно широком диапазоне. Данный регулятор обеспечивает приемлемое время регулирования, при большой амплитуде автоколебаний, что компенсируется простотой изготовления такого вида регуляторов.
ВЫВОДЫ
Автоматическая система регулирования температуры при данных параметрах устойчива. Качество процессов регулирования в системе можно увеличить путем изменения параметров системы (в частности параметры Кр, Тр), их оптимизации. Например, при уменьшении общего коэффициента передачи системы уменьшается амплитудное значение сигнала на выходе (выброс) и уменьшается перерегулирование. Так же есть возможность управлять временем установления выходной величины на требуемый уровень
В ходе выполнения курсовой работы были получены статические и динамические характеристики системы регулирования, произведена оптимизация параметров регулятора. Также проводилось исследования работы системы при различных возмущающих воздействиях, задающего воздействия и при влиянии других параметров ( напряжение питания сети, параметров регулятора). Проанализирована работа системы при использовании вместо ПИ-регулятора других типов (П, ПД, ПИД), а также двухпозиционного реле.
Моделирование системы позволяет достаточно точно определять свойства системы, ее поведение при различных значениях входного и возмущающего воздействия и с помощью оптимизации найти наилучшие значения ее параметров.
Список использованной литературы:
1. Моделирование и расчет автоматических систем управления: С.И. Малафеев, А.А. Малафеева. Учебное пособие / «Посад» 2003;
2. Андриевский Б.Р., Фрадков А.Л. Элементы математического моделирования в программных средах MATLAB5 и Scilab. - С.Пб.: Наука, 2001.
3. Горлов В.Н., Малафеев С.И. Основы вычислительных методов. – Владимир, ВлГУ, 1997.
4. Малафеев С.И., Малафеева А.А. Системы автоматического управления. – Владимир, ВлГУ, 1998.
5. Баранов Г.Л., Макаров А.В. Структурное моделирование сложных динамических систем. – Киев: Наукова думка, 1986
6. Холодниок М., Клич А., Кубичек М., Марек М. Методы анализа нелинейных динамических моделей / Пер. с чешск. – М.: Мир, 1991.
Похожие работы
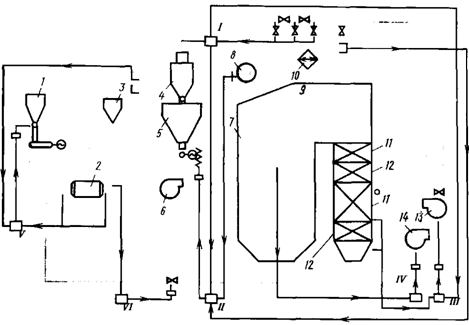
... на основе правил Госгортехнадзора с учетом местных условий и особенностей оборудования. Котел должен быть оборудован необходимым количеством контрольно-измерительных приборов, автоматической системой регулирования важнейших параметров котла, защитными устройствами, блокировкой и сигнализацией. Режимы работы котла должны соответствовать режимной карте, в которой указываются рекомендуемые ...
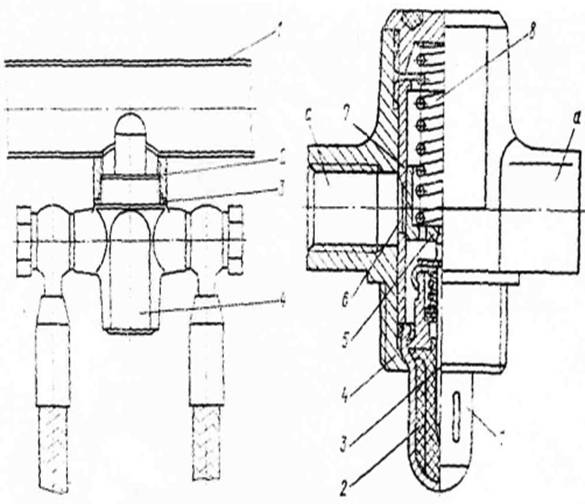
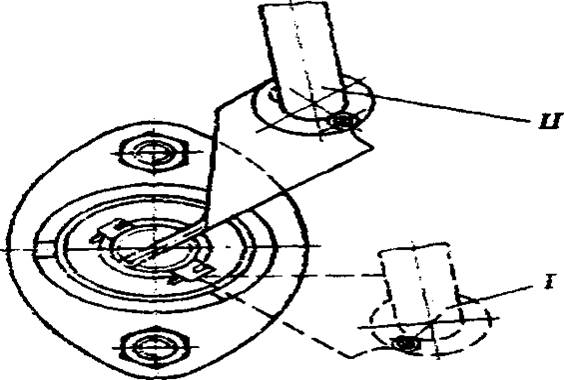
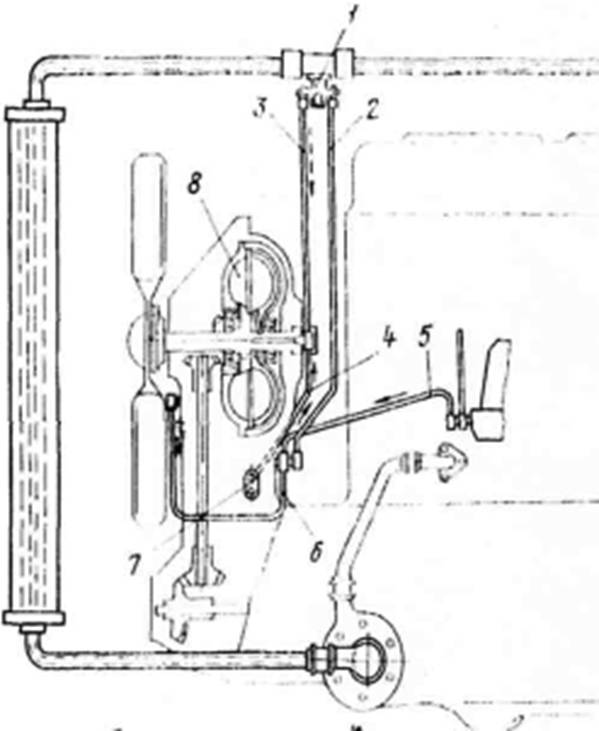
... . 6) на крышке 5; 2) провертывая коленчатый вал по ходу, подвести отверстие, а колпака 6 гидромуфты против смотрового отверстия; Рис. 5 Схема автоматического регулирования температуры охлаждающей жидкости: 1 — терморегулятор; 2, 3, 4, 5, 6 — рукава; 7 — кран управления приводом вентилятора; 8 — гидромуфта; а — путь масла при питании гидромуфты через терморегулятор; ь— ь масла при постоянно ...
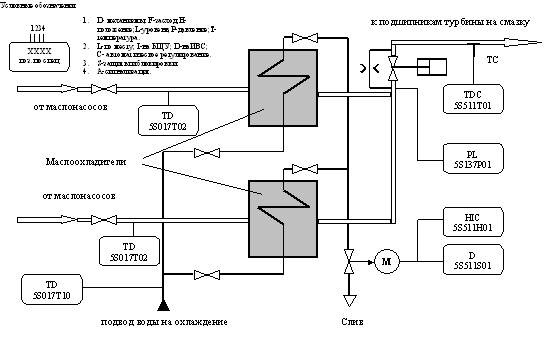
... : - по маслу 20кПа - по воде 20,1кПа Максимальное рабочее давление: - масла 0,5Мпа - воды 0,5МПа Функциональная схема системы регулирования температуры смазочного масла приведена на рис. 9. Она содержит два маслоохладителя параллельно ...

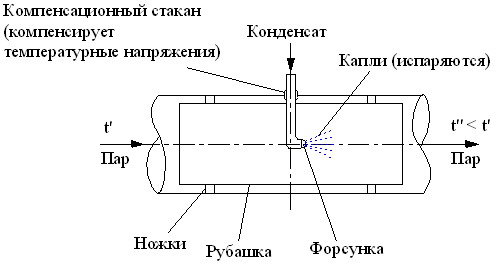
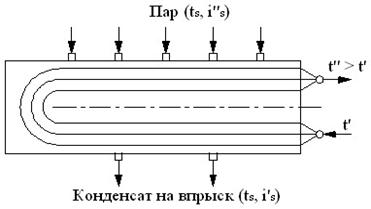
... через ППТО с помощью трехходового клапана и обводного паропровода. В качестве резервного средства регулирования на случай чрезмерного повышения tв.п предусматривается аварийный впрыск. Принципиальная схема автоматической системы регулирования, температуры вторичного пара с помощью ППТО приведена на рис 11.28 (вариант а). Недостаток ППТО — существенная инерция по tв.п. 2. Регулирование с помощью ...
0 комментариев