Навигация
Отсюда следует, что для значений ![]() q+1 автоковариации и автокорреляции удовлетворяют тем же соотношениям, что и в модели АР(р):
q+1 автоковариации и автокорреляции удовлетворяют тем же соотношениям, что и в модели АР(р):
![]()
В итоге оказывается, что при q<р вся автокорреляционная функция будет выражаться совокупностью затухающих экспонент и / или затухающих синусоидальных волн, а при q>p будет q-p значений ![]() , выпадающих из данной схемы.
, выпадающих из данной схемы.
Модель АРСС допускает обобщение на случай, когда случайный процесс является нестационарным. Ярким примером такого процесса являются «случайные блуждания»:
![]() (1)
(1)
С использованием оператора сдвига модель (1) принимает вид
![]() (2)
(2)
Из (2) видно, что процесс (1) расходящийся, поскольку![]() . Характеристическое уравнение этого процесса имеет корень, равный единице, то есть имеет место пограничный случай, когда корень характеристического уравнения оказался на границе единичной окружности. В то же время, если перейти к первым разностям
. Характеристическое уравнение этого процесса имеет корень, равный единице, то есть имеет место пограничный случай, когда корень характеристического уравнения оказался на границе единичной окружности. В то же время, если перейти к первым разностям ![]() , то процесс
, то процесс ![]() окажется стационарным.
окажется стационарным.
В общем случае полагается, что нестационарный авторегрессионный оператор ![]() в модели АРСС имеет один или несколько корней, равных единице. Иными словами,
в модели АРСС имеет один или несколько корней, равных единице. Иными словами, ![]() является нестационарным оператором авторегрессии порядка p+d; d корней уравнения
является нестационарным оператором авторегрессии порядка p+d; d корней уравнения ![]() =0 равны единице, а остальные р корней лежат вне единичного круга. Тогда можно записать, что
=0 равны единице, а остальные р корней лежат вне единичного круга. Тогда можно записать, что
![]() ,
,
где a(B) – стационарный оператор авторегрессии порядка р (с корнями вне единичного круга).
Введем оператор разности ![]() , такой что
, такой что ![]()
![]() =(1-B)
=(1-B)![]() , тогда нестационарный процесс АРСС запишется как
, тогда нестационарный процесс АРСС запишется как
![]() , (3)
, (3)
где b(B) – обратимый оператор скользящего среднего (вне его корни лежат вне единичного круга).
Для разности ![]() порядка d , то есть
порядка d , то есть ![]() модель
модель
![]()
описывает уже стационарный обратимый процесс АРСС(р, q).
Для того чтобы от ряда разностей вернуться к исходному ряду требуется оператор s, обратный ![]() :
:
![]()
Этот оператор называют оператором суммирования, поскольку
![]() .
.
Если же исходной является разность порядка d, то для восстановления исходного ряда понадобится d - кратная итерация оператора s, иначе d- кратное суммирование (интегрирование). Поэтому процесс (3) принято называть процессом АРИСС, добавляя к АРСС термин интегрированный. Кратко модель (3) записывают как АРИСС(р, d, q), где р – порядок авторегрессии, d – порядок разности, q – порядок скользящего среднего. Ясно, что при d =0 модель АРИСС переходит в модель АРСС .
На практике d обычно не превышает двух, то есть d .
Модель АРИСС допускает представление, аналогичное общей линейной модели, а так же в виде «чистого » процесса авторегрессии (бесконечного порядка). Рассмотрим, к примеру, процесс АРИСС (1, 1, 1):
![]() (4)
(4)
Из (4) следует, что
Отсюда
![]() (5)
(5)
В выражении (5) коэффициенты, начиная с третьего, вычисляются по формуле ![]() .
.
Представление (5) интересно тем, что веса, начиная с третьего, убывают по экспоненциальному закону. Поэтому, хотя формально![]() зависит от всех прошлых значений, однако реальный вклад в текущее значение внесут несколько «недавних» значений ряда. Поэтому уравнение (5) более всего подходит для прогнозирования.
зависит от всех прошлых значений, однако реальный вклад в текущее значение внесут несколько «недавних» значений ряда. Поэтому уравнение (5) более всего подходит для прогнозирования.
11.Прогнозирование по модели АРИСС
Как уже отмечалось, процессы АРИСС допускают представление в виде обобщенной линейной модели, то есть
![]()
Естественно искать будущее (прогнозное) значение ряда в момент ![]() в виде
в виде
![]()
Ожидаемое значение ![]() , которое мы будем обозначать как
, которое мы будем обозначать как ![]()
![]() =
=![]()
Первая сумма в правой части последнего соотношения содержат лишь будущие возмущения (прогноз делается в момент t, когда известны прошлые значения и ряда ![]() и возмущений
и возмущений![]() ) и для них математическое ожидание равно 0 по определению. Что же касается второго слагаемого, то возмущения здесь уже состоялись, так что
) и для них математическое ожидание равно 0 по определению. Что же касается второго слагаемого, то возмущения здесь уже состоялись, так что
![]()
Таким образом
![]() =
=![]() (1)
(1)
Ошибка прогноза, представляющая расхождение между прогнозным значением и его ожиданием есть
![]() =
=![]()
Дисперсия ошибки отсюда есть
![]() (2)
(2)
Прогнозирование по соотношению (1) в принципе возможно, однако затруднительно поскольку требует знания всех прошлых возмущений. К тому же для стационарных рядов скорость затухания ![]() часто оказывается недостаточной, не говоря уже о нестационарных процессах, для которых ряды
часто оказывается недостаточной, не говоря уже о нестационарных процессах, для которых ряды ![]() расходятся.
расходятся.
Поскольку модель АРИСС допускает и другие представления, рассмотрим возможности их использования для прогнозирования. Пусть модель задана непосредственно разностным уравнением
![]() (3)
(3)
По известным значениям ряда (результатам наблюдений) ![]() и оцененным значениям возмущений
и оцененным значениям возмущений ![]() , опираясь на рекуррентную формулу (3) можно оценить ожидаемое значение ряда в момент t+1:
, опираясь на рекуррентную формулу (3) можно оценить ожидаемое значение ряда в момент t+1:
![]()
-![]() , (4)
, (4)
При прогнозировании на два такта следует вновь воспользоваться рекуррентным соотношением (3), где в качестве наблюденного значения ряда в момент t+1 следует взять предсказанную по (4) величину ![]() , то есть
, то есть ![]() и так далее.
и так далее.
Наконец, возможно прогнозирование опираясь на представление процесса АРИСС в виде авторегрессии (). Как уже отмечалось, несмотря на то что порядок авторегрессии бесконечен, весовые коэффициенты в представлении ряда убывают довольно быстро, поэтому для вычисления прогноза достаточно умеренное число прошлых значений ряда.
Дисперсия ошибки прогноза на ![]() шагов вперед есть
шагов вперед есть
![]()
и согласно выражению (2) дается выражением
![]()

В предположении, что случайные возмущения являются гаусовским белым шумом, то есть ![]() можно рассматривать доверительный интервал для прогнозного значения ряда стандартным образом.
можно рассматривать доверительный интервал для прогнозного значения ряда стандартным образом.
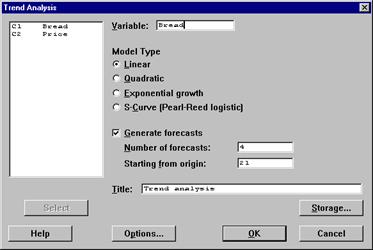
12.Технология построения моделей АРИСС
Описанные выше теоретические схемы строились в предположении, что временной ряд имеет бесконечную предысторию, тогда как реально исследователю доступен ограниченный объем наблюдений. Модель приходится подбирать экспериментально, подгоняя ее к имеющимся в распоряжении данным. Поэтому с позиций теоретического применения теории анализа временных рядов определяющее значение имеют вопросы корректной спецификации модели АРИСС(p, d, q) (ее идентификации) и последующего оценивания ее параметров.
На этапе идентификации наблюденные данные используются для определения подходящего класса моделей и делаются предварительные оценки ее параметров, то есть строится пробная модель. Затем пробная модель подгоняется к данным более тщательно; при этом первичные оценки, полученные на этапе идентификации выступают в качестве начальных значений в итеративных алгоритмах оценивания параметров. И наконец, на третьем этапе полученная модель подвергается диагностической проверке для выявления возможной неадекватности модели и выработки подходящих изменений в ней.Рассмотрим перечисленные этапы подробнее.
Идентификация модели
Цель идентификации – получить некоторое представление о величинах p, d, q и о параметрах модели. Идентификация модели распадается на две стадии
1. Определение порядка разности d исходного ряда ![]() .
.
2. Идентификация модели АРСС для ряда разностей ![]() .
.
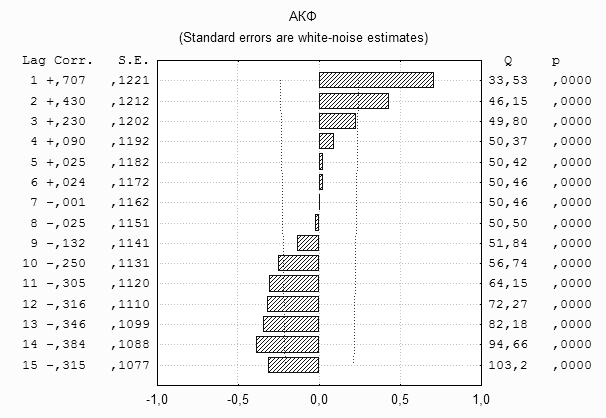
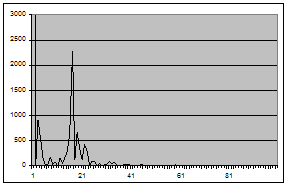
Основной инструмент, используемый на обеих стадиях – автокорреляционная и частная автокорреляционная функции.
В теоретической части мы видели, что у стационарных моделей автокоррелящии ![]() спадают с ростом k весьма быстро (по корреляционному закону). Если же автокорреляционная функция затухает медленно и почти линейно, то это свидетельствует о нестационарности процесса, однако, возможно, его первая разность стационарно.
спадают с ростом k весьма быстро (по корреляционному закону). Если же автокорреляционная функция затухает медленно и почти линейно, то это свидетельствует о нестационарности процесса, однако, возможно, его первая разность стационарно.
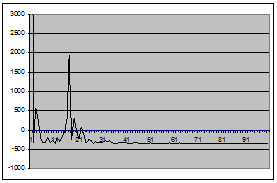
Построив коррелограмму для ряда разностей, вновь повторяют анализ и так далее. Считается, что порядок разности d, обеспечивающий стационарность, достигнут тогда, когда автокорреляционная функция процесса ![]() падает довольно быстро. На практике
падает довольно быстро. На практике ![]() и достаточно просмотреть порядка 15-20 первых значений автокорреляции исходного ряда, его первые и вторые разности.
и достаточно просмотреть порядка 15-20 первых значений автокорреляции исходного ряда, его первые и вторые разности.
После того как будет получен стационарный ряд разностей, порядка d, изучают общий вид автокорреляционной и частной автокорреляционной функций этих разностей. Опираясь на теоретические свойства этих функций можно выбрать значения p и q для АР и СС операторов. Далее при выбранных p и q строятся начальные оценки параметров авторегрессии ![]() и скользящего среднего b=(
и скользящего среднего b=(![]() ). Для авторегрессионных процессов используются уравнения Юла-Уокера, где теоретические автокорреляции заменены на их выборочные оценки. Для процессов скользящего среднего порядка q только первые q автокорреляций отличны от нуля и могут быть выражены через параметры
). Для авторегрессионных процессов используются уравнения Юла-Уокера, где теоретические автокорреляции заменены на их выборочные оценки. Для процессов скользящего среднего порядка q только первые q автокорреляций отличны от нуля и могут быть выражены через параметры ![]() (см. ). Заменяя
(см. ). Заменяя ![]() их выборочными оценками
их выборочными оценками ![]() и решая получающиеся уравнения относительно
и решая получающиеся уравнения относительно ![]() , получим оценку
, получим оценку ![]() . Эти предварительные оценки можно использовать как начальные значения для получения на следующих шагах более эффективных оценок.
. Эти предварительные оценки можно использовать как начальные значения для получения на следующих шагах более эффективных оценок.
Для смешанных процессов АРСС процедура оценивания усложняется . Так для рассмотренного в п. процесса АРСС(1,1) параметры ![]() и
и ![]() , точнее их оценки, получаются из ( ) с заменой
, точнее их оценки, получаются из ( ) с заменой ![]() и
и ![]() их выборочными оценками.
их выборочными оценками.
В общем случае вычисление начальных оценок процесса АРСС(p,q) представляет многостадийную процедуру и здесь не рассматривается. Отметим только, что для практики особый интерес имеют АР и СС процессы 1-го и 2-го порядков и простейший смешанный процесс АРСС(1,1).
В заключение заметим, что оценки автокорреляций, на основе которых строятся процедуры идентификации могут иметь большие дисперсии (особенно в условиях недостаточного объема выборки – несколько десятков наблюдений) и быть сильно коррелированны. Поэтому говорить о строгом соответствии теоретической и эмпирической автокорреляционных функций не приходится. Это приводит к затруднениям при выборе p, d, q, поэтому для дальнейшего исследования могут быть выбраны несколько моделей.
линейный ряд система временной ряд
Размещено на http://www.
Похожие работы
... временного ряда и объяснение механизма формирования ряда часто используются для статистического прогнозирования, которое в большинстве случаев сводится к экстраполяции обнаруженных тенденций развития. Анализ временного ряда и последующее прогнозирование его развития может использоваться для: – планирования в экономике, производстве, торговле; – управления и оптимизации, протекающих в обществе ...

... модели строится прогноз на один шаг вперед, причем его отклонение от фактических уровней ряда расценивается как ошибка прогнозирования, которая учитывается в соответствии со схемой корректировки модели. Далее по модели со скорректированными параметрами рассчитывается прогнозная оценка на следующий момент времени и т.д. Т.о. модель постоянно учитывает новую информацию и к концу периода обучения ...

... =, , при условии, что . Из определения видно, что спектральная плотность непрерывная, периодическая функция с периодом, равным по каждому из аргументов. 2. ОЦЕНИВАНИЕ СМЕЩЕНИЯ СТАТИСТИКИ ВЗАИМНОЙ СПЕКТРАЛЬНОЙ ПЛОТНОСТИ Рассмотрим действительный стационарный в широком смысле случайный процесс,, с математическим ожиданием , , взаимной ковариационной функцией , и взаимной спектральной ...
овных этапов анализа и прогнозирования временных рядов. Последний раздел посвящен развивающемуся направлению статистических исследований - прогнозированию временных рядов с помощью адаптивных моделей. 1. Теоретическая часть 1.1 Компоненты временных рядов Проверка гипотезы о существовании тенденции В практике прогнозирования принято считать, что значения уровней временных рядов ...
0 комментариев