Расчёт пути трения и скорости относительного скольжения элементов шарниров рулевых тяг
Исследование зависимости изменения схождения управляемых колёс от упругости, зазоров в сопряжениях и усилия в рулевом приводе
Силовой способ оценки характеристик и состояния рулевого привода
Теоретическое обоснование критериев оценки эксплуатационного состояния рулевого привода и шарниров рулевых тяг
Обоснование критериев оценки эксплуатационного состояния шарниров рулевых тяг с осевой пружиной
Навигация
Исследование зависимости изменения схождения управляемых колёс от упругости, зазоров в сопряжениях и усилия в рулевом приводе
Исследование рабочих процессов в рулевом приводе автомобилей
36512
знаков
36
таблиц
11
изображений
3. Исследование зависимости изменения схождения управляемых колёс от упругости, зазоров в сопряжениях и усилия в рулевом приводе
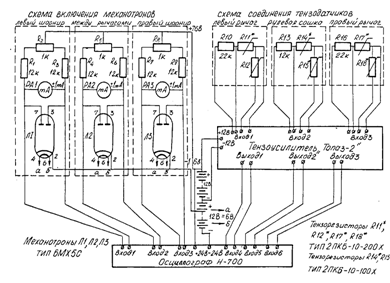
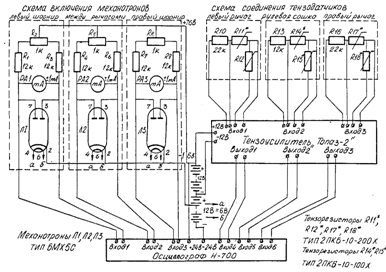
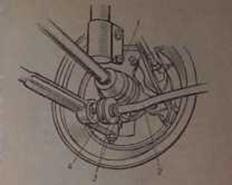
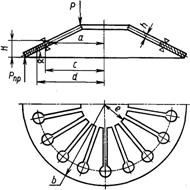
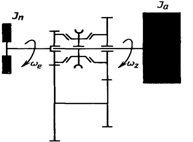
Изменение схождения управляемых колёс происходит под действием среднеэксплуатационных нагрузок с интенсивностью, которая зависит от его первоначальной величины. Оно вызвано смещениями в кинематической цепи рулевого привода, которые формируются за счёт упругости деталей и подвижных сопряжении РП с одной стороны и зазорами, вызванными износом и деформацией элементов подвижных сопряжении, а также ослаблением креплений и потерей прочности деталей РП с другой. Изменение величины первоначального схождения колёс проявляется взаимными относительными смещениями звеньев кинематической цепи рулевого привода, которые могут быть приведены к приращению расстояния между дисками управляемых колёс. Процесс формирования смещений в РП рассмотрим в виде схемы, где изображена плоская модель рулевого привода автомобилей рассматриваемого класса. Исследуем вначале этот процесс при допущении, что в рулевом приводе действует усилие 30 даН, достаточное для выбора зазоров и начала деформации РП. При этом, изменение схождения происходит только под действием упругости и зазоров, остальные факторы можно считать постоянными. Тогда, согласно обозначениям (рис. 3) схождение, измеренное как разность расстояний между заокраинами дисков управляемых колёс впереди и сзади передней оси на высоте центров колёс, равно:
|
| (24) |
Угол схождение управляемых колес можно выразить:
|
| (25) |
где Срп - суммарная упругость элементов рулевого привода, мм/даН; Dрп - суммарная величина зазоров в сопряжениях РП, приходящаяся на единицу приложенного усилия при замере, мм/даН. ![]() - коэффициент приведения к высоте центров колёс, учитывающий измерение смещений на высоте РП. ВАЗ, АЗЛК -
- коэффициент приведения к высоте центров колёс, учитывающий измерение смещений на высоте РП. ВАЗ, АЗЛК - ![]() =1,25, ГАЗ-
=1,25, ГАЗ-![]() = 1,30;
= 1,30; ![]() - коэффициент пропорциональности между величинами схождения, измеренными по разности расстояний и углу поворота управляемых колёс.
- коэффициент пропорциональности между величинами схождения, измеренными по разности расстояний и углу поворота управляемых колёс.
ВАЗ (АЗЛК) - ![]() = I4·I0-4 рад = 0,08° = 4,8 мин; ГАЗ -
= I4·I0-4 рад = 0,08° = 4,8 мин; ГАЗ - ![]() = 13,2 I0-4 рад = 0,075° == 4,5 мин.
= 13,2 I0-4 рад = 0,075° == 4,5 мин.
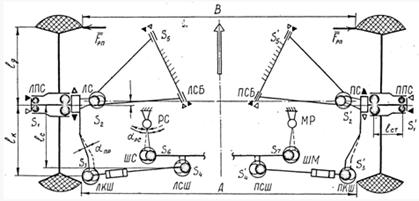

Рис. 3 Схема формирования смещений в кинематической цепи рулевого привода автомобилей с независимой передней подвеской с обозначением подвижных сопряжении и зазоров в них.
Коэффициент ![]() показывает, что смещение в РП на I мм соответствует углу поворота одного управляемого колеса для моделей ВАЗ на 9,6 мин (0,16°) при условии, что второе колесо неподвижно. Величины обоих коэффициентов зависят от углов установки управляемых колёс, конструктивных особенностей рулевого привода и передней подвески, шин и давления воздуха в них.
показывает, что смещение в РП на I мм соответствует углу поворота одного управляемого колеса для моделей ВАЗ на 9,6 мин (0,16°) при условии, что второе колесо неподвижно. Величины обоих коэффициентов зависят от углов установки управляемых колёс, конструктивных особенностей рулевого привода и передней подвески, шин и давления воздуха в них.
В дальнейшем исследовании будет использована величина схождения, измеренная по разности расстояний между дисками колёс на высоте рулевого привода (представляет удобство для экспериментальных исследований), т.к. она изменяется на двойную величину смещений в РП:
|
| (26) |
|
| (27) |
|
| (28) |
Знак и величина второго слагаемого зависимостей (24) - (27) определяется величиной и направлением усилия в рулевом приводе, которое вызвано действием моментов на управляемых колёсах и может быть приведено к усилию, приложенному к дискам управляемых колёс в месте измерения величины схождения (рис.3). Подвижные сопряжения рулевого привода находятся на разном расстоянии от заокраин дисков управляемых колёс, между которыми измеряется схождение, поэтому смещения в них должны быть приведены к радиусу диска колеса. Методика приведения и ранжирование коэффициентов изложена автором
|
| (29) |
где, согласно обозначениям на схеме рулевого привода (рис. ):
|
|

Процесс изменения схождения управляемых колёс по зависимости (29) моделировался на ЭВМ "НАИРИ-2" путём перебора задаваемых значений упругости и зазоров в отдельных сопряжениях РП, допустимые величины которых взяты из инструктивных материалов автомобильных заводов, а также работ и приведены в таблице 2. Моделирование показало, что суммарное действие допустимых величин перечисленных параметров при усилии в РП до 50 даН может вызвать смещение в кинематической цепи рулевого привода до 10,68 мм, т.е. изменить схождение на величину, в 3-5 раз большую начального значения, и вызвать поворот управляемых колёс до 150·10-4 рад (0,85°) каждое. Однако линейный характер зависимости (29) вносит существенную погрешность в оценку влияния зазоров в сопряжениях, упругости и усилия в РП на изменение схождения и поворот управляемого колеса. Поэтому, на основании анализа физической сущности процесса формирования смещений в РП и результатов экспериментальных исследований достаточно представительной выборки (105 автомобилей) путём совместного моделирования процесса изменения схождения и его влияние на изменение эксплуатационных свойств автомобилей было подобрано аппроксимированное выражение зависимости изменения схождения, т.е. смещений в РП от перечисленных факторов с допустимой погрешностью.
Таблица 2 Исходные данные для моделирования величины изменения схождения
| № п/п | Наименование параметра | Обозна-чение | Среднее значение | Интервал варирования | Шаг варирования |
| I. | Зазоры в подшипниках ступиц передних колёс | S1 | 0,05 , мм | 0 - 0,1 | 0,025 |
| 2. | Зазоры в шарнирах поворотной стойки | S2 | 0,25 , мм | 0 – 0,5 | 0,05 |
| Зазоры в крайних рулевых шарнирах | S3 | 0,15 , мм | 0 – 0,3 | 0,05 | |
| 4. | Зазоры в средних рулевых шарнирах | S4 | 0,10 , мм | 0 - 0,3 | 0,05 |
| 5. | Зазоры в шарнирах рулевой сошки и маятникового рычага | S6 , S7 | 0,15 , мм | 0 - 0,3 | 0,05 |
| 6. | Упругость рулевой сошки | Сpc | 0,0085 | 0,005-0,010 | 0,0005 |
| 7. | Упругость средней-рулевой тяги | Сcт | 0,0042 | 0,002-0,006 | 0,0005 |
| 8. | Упругость поворотных рычагов цапфы | Спp | 0,0083 | 0,005-0,010 | 0,0005 |
| 9. | Упругость боковых рулевых тяг | Сбт | 0,0047 | 0,002-0,006 | 0,0005 |
|
| (30) |
|
| (31) |

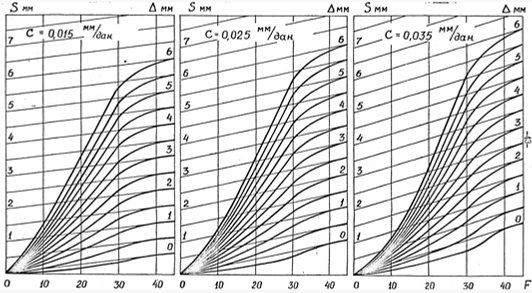
При этом принято допущение, что усилие в РП сжимает рулевую трапецию, т.е. уменьшает начальное схождение (имеет место в большинстве режимов движения). Разделение диапазона усилий в РП до и более 30 даН вызвано наличием двух экстремумов этой зависимости с учётом результатов дорожных и стендовых испытаний автомобиля ВАЗ. Однако при моделировании достигнуто удовлетворительное совмещение этих зависимостей, позволяющее описать процесс в диапазоне усилий до 150 даН.
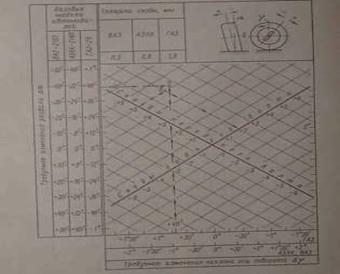
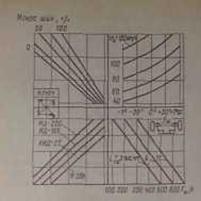
В результате моделирования процесса изменения схождения управляемых колёс по зависимостям (30, 31) получены номограммы (рис.4) зависимостей изменения схождения от усилия в рулевом приводе, упругости и уровня его технического состояния, удобные для практического применения при регулировке и оптимизации характеристик и состояния РП и ПМ.
Похожие работы
... люфта рулевого колеса была экспериментально исследована на примере выборки (25 ед.) автомобилей «ГАЗ-24Т». Причём, 1 мм смещений в РП соответствует 2,5° угла поворота рулевого колеса. При выполнении экспериментальных исследований использовались методы блочного рандомизированного планирования, а их результаты были подвергнуты одномерному статистическому и дисперсионному анализу. На рисунке 22 в ...
... . Работы, связанные с монтажом -демонтажем шин, их обслуживанием, ремонтом (подкачкой, балансировкой и т. д.), составляют 3—7% общей трудоемкости ТО и ремонта автомобилей. От 3 до 6 чел. на АТП средней мощности заняты технической эксплуатацией шин. В зависимости от конструктивных особенностей шин расход топлива автомобиля может меняться на 4—7 %. Несоблюдение параметров технического состояния шин ...
... дорожный просвет и повышается уровень шума при работе главной передачи. КПД цилиндрической пары — не менее 0,98. 1.4 Дифференциалы трансмиссии автомобиля Анализ и оценка конструкции дифференциала автомобиля На автомобиле ВАЗ-2108 применяется симметричный конический сателитный дифференциал. Симметричные конические дифференциалы наиболее распространенные (их часто называют простыми). ...
... -технической литературой при разработке технологических процессов ТО, ремонта и оценке надежности автомобилей в условиях АТП; Темой данного курсового проекта является разработка технологического процесса ТР переднего моста автомобиля ГАЗ-31029. Первая часть проекта посвящена статистической оценке трудоемкости работ по ТР, что необходимо для правильной разработки самого технологического процесса ...
0 комментариев