Навигация
2. Телеуправление
Телеуправление может быть реализовано двумя методами: методом командного управления и методом управления по радиолучу.
Метод командного управления был использован в первой предложенной немцами системе управления “Burgund” для снарядов класса “поверхность – воздух”.
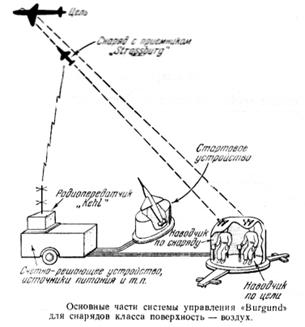
Измерение угловых координат цели и снаряда осуществляется с помощью оптических устройств. Слежение за целью и снарядом производится операторами-наводчиками. Они сидят на поворотной платформе. Наводчик на цель старается удержать цель на перекрестии своей оптики ручками управления. Тем самым он поворачивает платформу вместе с оптикой по азимуту, а также отдельно оптику как свою, так и другого наводчика – по углу места. Наводчик снаряда ручкой управления снарядом старается совместить снаряд с перекрестием своего оптического прибора, которое соответствует направлению на цель. Для улучшения видимости снаряда предлагалось устанавливать на нем факелы. Ручка управления снарядом связана с датчиком команд, которые по командной радиолинии (радиопередатчик Kehl – радиоприемник Strassburg) передавались на борт снаряда. Как следует из этого описания, при идеальном управлении снаряд должен все время находиться на линии визирования цели. Такой метод управления называется методом накрытия цели.
Траектория, по которой будет двигаться снаряд, может быть приближенно построена следующим образом. Считаем, что цель движется прямолинейно с постоянной скоростью. Разобьем траекторию цели на ряд малых участков Ц0Ц1, Ц1Ц2, Ц2Ц3 и т.д., которые цель пролетает за малый интервал времени Dt. Длина каждого из участков равна произведению скорости цели VЦ на интервал времени Dt. Ниже показано построение траектории снаряда.
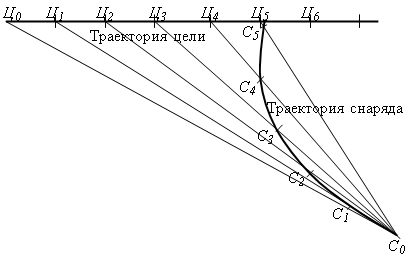
В момент старта снаряд находился в положении С0, а цель – в положении Ц0. Точка С0 соответствует месту расположения внешнего пункта управления и станции слежения за целью. Через время Dt цель переместится в точку Ц1. Чтобы определить положение снаряда, проводим линию С0Ц1. Снаряд через время Dt должен находиться на этой линии, так как наведение производится по методу накрытия цели. Поэтому из точки С0 делается засечка радиусом VCDt на линии С0Ц1. Получаем точку С1. Еще через время Dt цель переместится в положение Ц2. Снаряд должен находиться на линии “внешний пункт управления – цель”. Поэтому проводим линию С0Ц2 и находим положение точки С2, делая засечку из точки С1 радиусом VCDt на линии С0Ц2. Продолжив такое построение для следующих точек С3, С4 и т.д. и соединив все точки Сi плавной кривой, получим траекторию снаряда.
Метод накрытия цели характерен и для систем наведения по радиолучу. Использующаяся в этих системах радиолокационная станция следит за целью, то есть обеспечивает перемещение радиолуча вслед за перемещением цели. Как вы уже знаете после ознакомления с историей радиолокации, в первых РЛС сопровождения использовалось коническое сканирование луча. Радиолуч РЛС сопровождения представляет собой как бы пространственную воронку, ось которой совпадает с равносигнальным направлением. На оси “воронки” должна располагаться цель. На это же направление должен вывести себя и снаряд. На снаряде находится приемник, который принимает сигналы радиолокатора и определяет отклонение снаряда от равносигнального направления. По измеренному отклонению вырабатываются команды для управления снарядом.
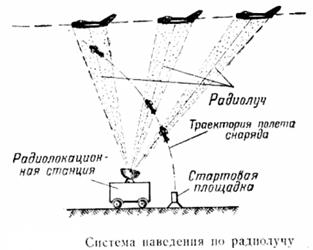
Ясно, что, чем уже диаграмма направленности РЛС, тем точнее определение местоположения цели и снаряда, то есть точнее наведение. Но в узкий луч очень трудно попасть снаряду после старта. Поэтому РЛС сопровождения формирует два луча: узкий – для наведения снаряда на цель и широкий – для ввода снаряда в луч после старта. Переключение приемника снаряда на работу с широкого луча на узкий производится автоматически.
Но наведение по методу накрытия цели является далеко не лучшим. Посмотрим на построенную траекторию снаряда. Она криволинейная, и путь, пройденный снарядом, длиннее расстояния между точкой старта снаряда и точкой встречи снаряда с целью. Почему так получилось? Потому что снаряд все время летит прямо на цель, а не в упреждающую точку, т.е. туда, где цель будет через некоторое время. Лучше всего было бы, если бы снаряд направлялся не на цель, а в точку встречи снаряда с целью. Это была бы самая экономичная траектория.
Такой самой экономичной траектории соответствует следующий метод наведения – метод параллельного сближения. Построим траекторию снаряда для этого метода при тех же исходных условиях, что и при методе накрытия цели. Правило построения такое: линия “цель – снаряд” во время всего движения остается параллельной самой себе.
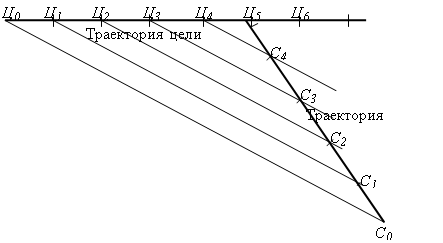
Процедура построения такая же, как и для метода накрытия цели, только линия “цель-снаряд” от шага к шагу строится по-другому. Сравните траектории снаряда для рассмотренных методов. Мало того, что траектория снаряда стала короче (при данных условиях она прямолинейна), но и встреча снаряда с целью произошла раньше.
Конечно, для реализации метода параллельного сближения недостаточно знания только угловых координат цели и снаряда. Для расчета упрежденной точки встречи нужно также знать дальности до цели и снаряда и их скорости. А в систему телеуправления необходимо ввести вычислитель для выработки команды управления.
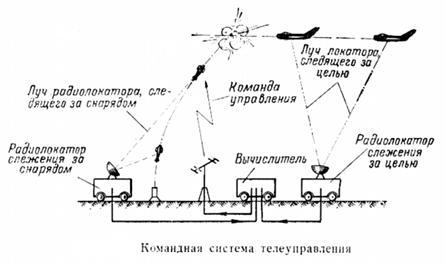
Радиолокаторы слежения за целью и слежения за снарядом автоматически определяют координаты цели и снаряда: угловые координаты, дальность и их производные. Эти данные поступают в вычислитель, который вычисляет координаты упреждающей точки, рассчитывает траекторию снаряда, определяет отклонение снаряда от расчетной траектории, т.е. ошибку наведения и формирует в соответствии с этой ошибкой команды, передаваемые по радиолинии управления на снаряд.
Похожие работы


... комплексной частоты. Изображения по Лапласу во всех точках комплексной плоскости являются аналитическими функциями. На практике применяют таблицы соответствия между оригиналами и изображениями. 3 Интегральное преобразование Гильберта Часто радиоинженер сталкивается с радиосигналами, получаемые в результате одновременной модуляции амплитуды и частоты(или фазы) по очень сложному закону. ...
... кроме того, обязательно существует зависимость процессов на входе системы от процессов на ее выходе. Общая характеристика радиоуправления летательными аппаратами Из всего многообразия летательных аппаратов мы выделим лишь следующие их виды, наиболее характерные с точки зрения применяемых методов и средств управления ...
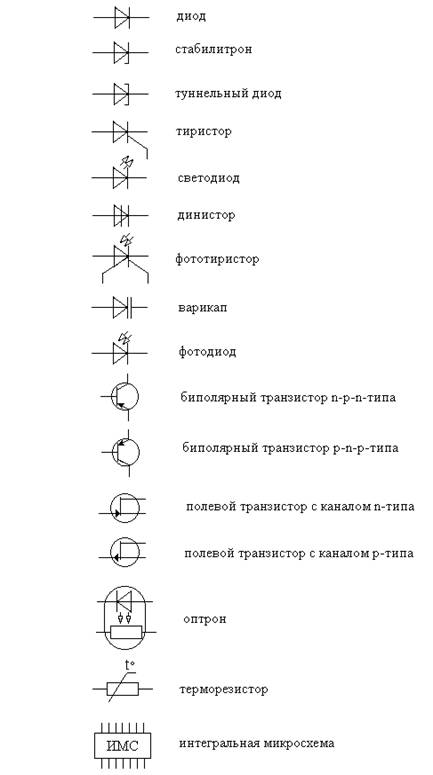
... интегральным микросхемам. Они позволяют выполнять логическую обработку большого числа сигналов, воспроизводить сложные функции усиления, генерации и преобразования электрических сигналов. Тиристор – электропреобразовательный полупроводниковый прибор, содержащий три или более р-п-перехода. По числу внешних электродов тиристоры делятся на: двухэлектродные – динисторы и трехэлектродные – тринисторы. ...
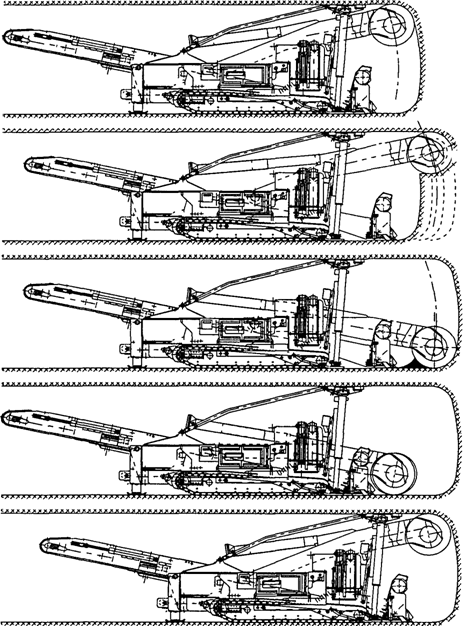
... мощность разрабатываемых пластов; угол падения (залегания) угольных пластов; строение пластов; крепость и вязкость угля; обводненность месторождений и т.д. Системой разработки данного выемочного поля является технология отработки пласта по простиранию длинными столбами. Система разработки длинными столбами отличается независимым ведением подготовительных и очистных работ. К началу очистной ...
0 комментариев